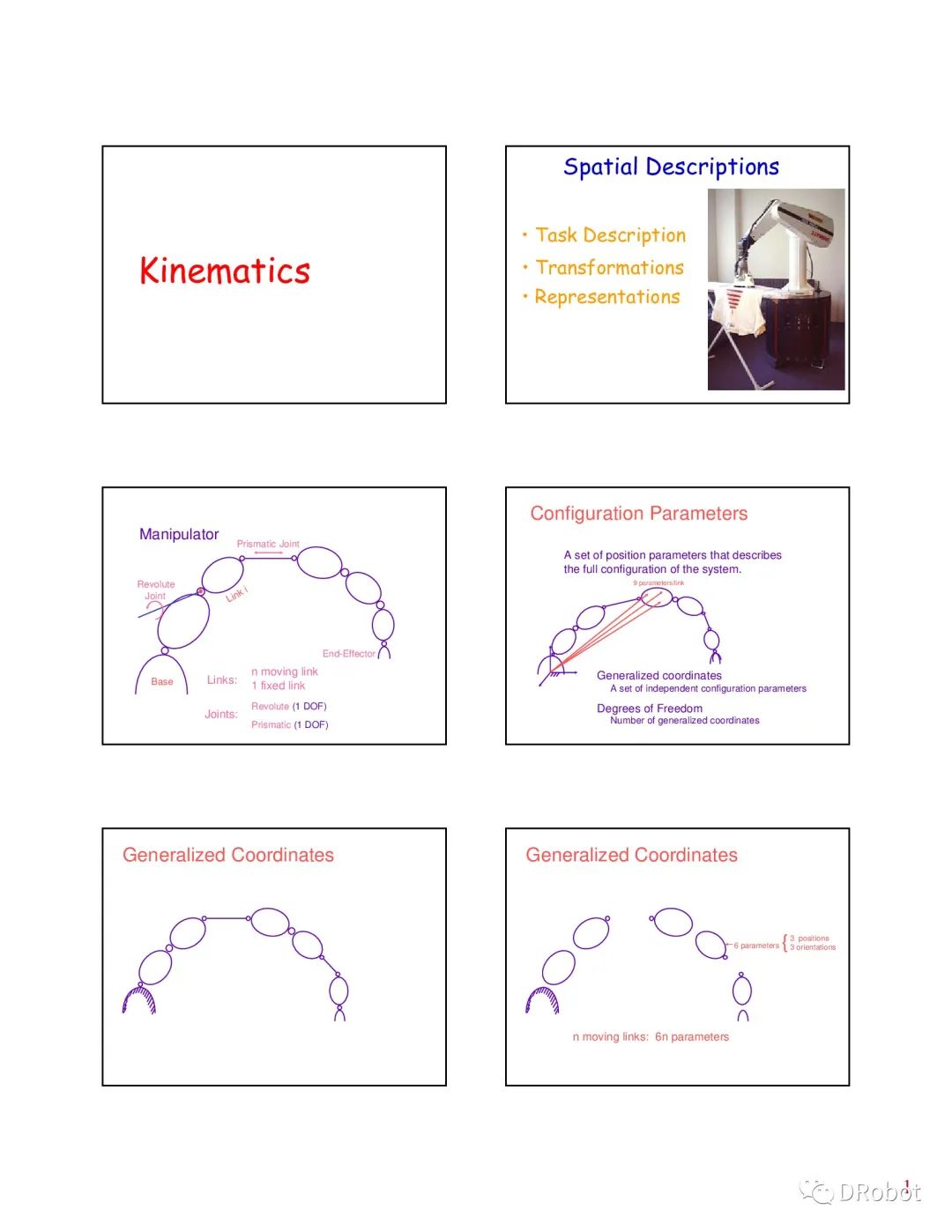
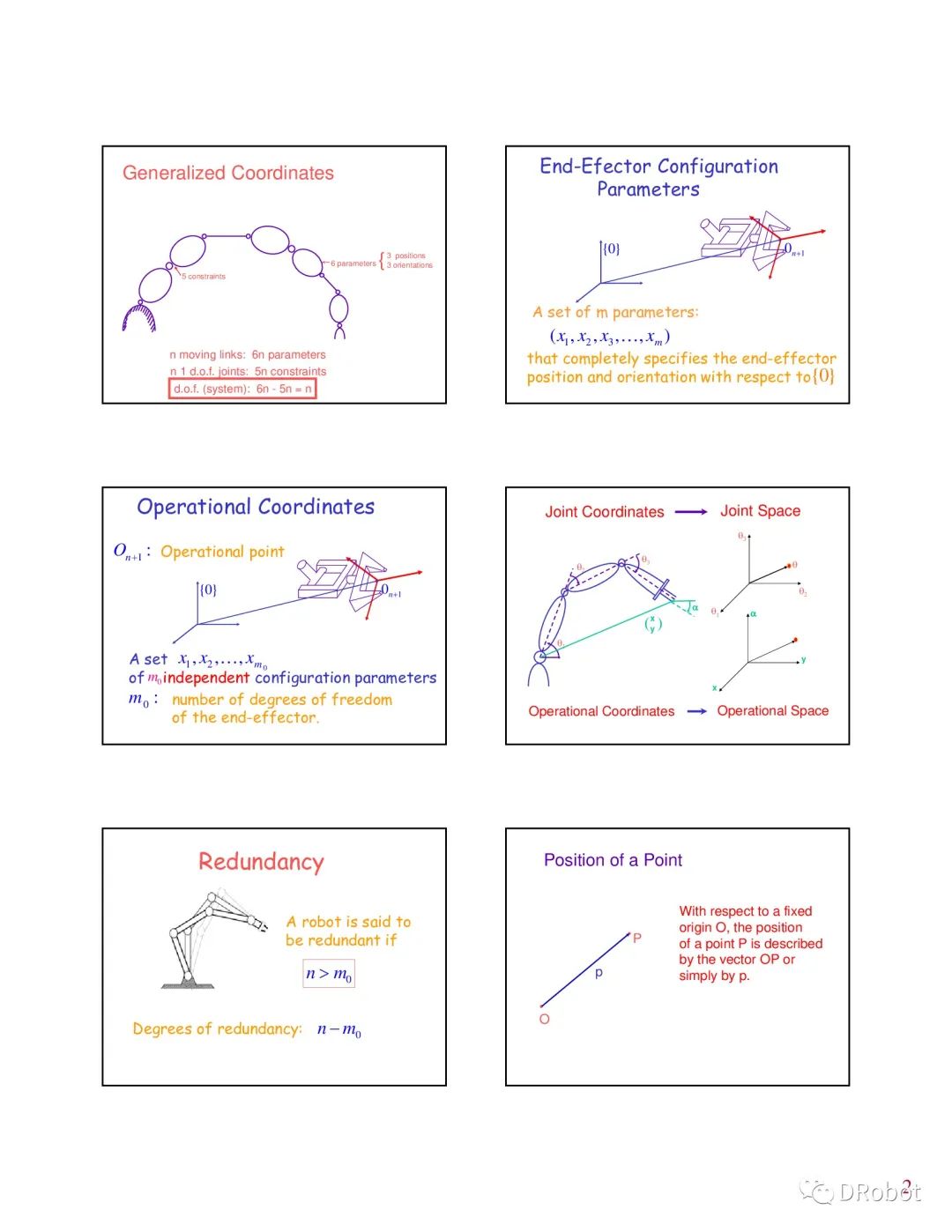
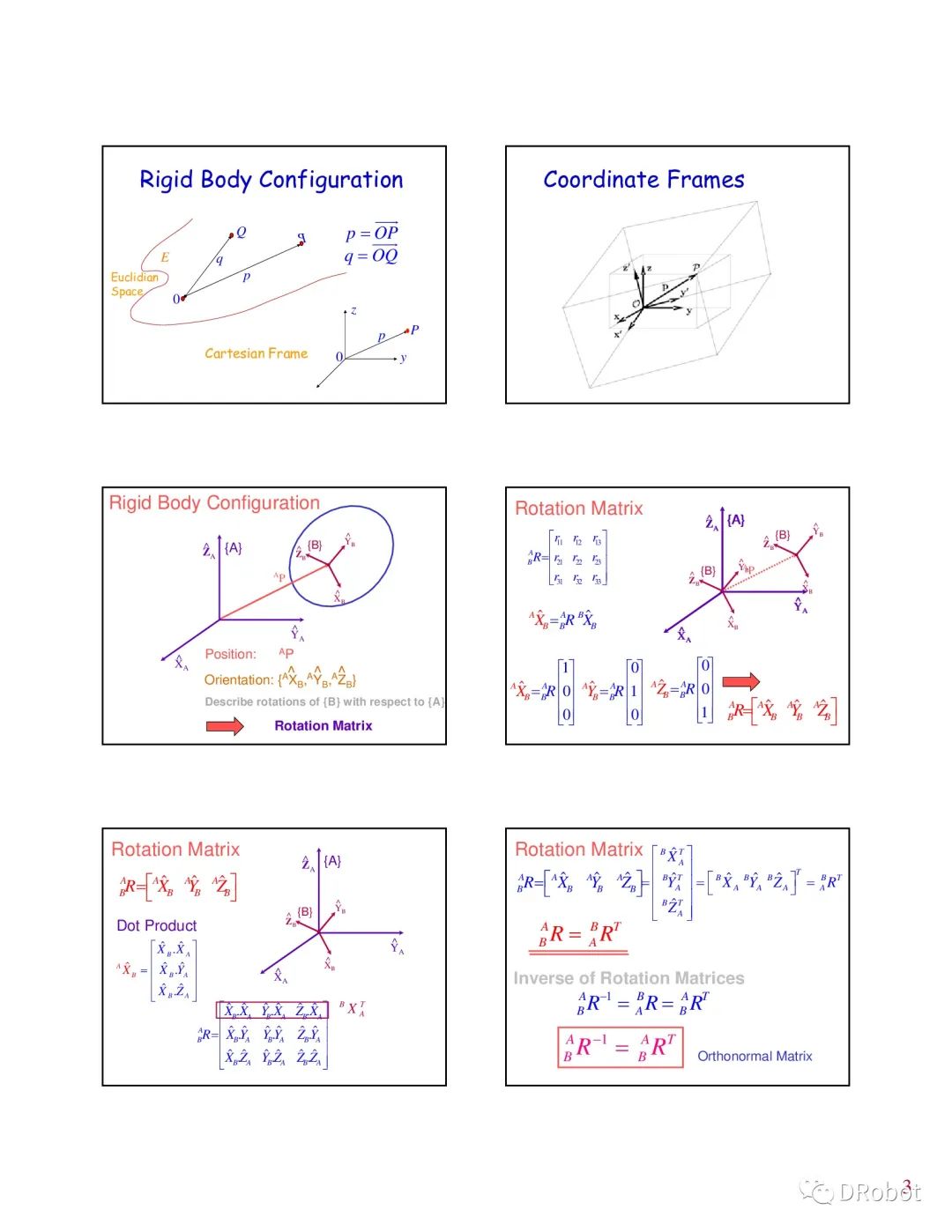
机器人操作臂通常是由一系列连杆和相应的运动副组合而成的空间开链机构,用于实现复杂的运动,完成规定的操作。因此,研究机器人运动和操作的前提是描述这些连杆之间,以及连杆、末端执行器和操作对象之间的相对运动关系。机器人运动学的很大一部分内容涉及建立各种坐标系来表示刚体的位置和姿态,以及这些坐标系之间的转换。刚体的位置(position)和姿态(orientation)统称为刚体的位姿(location),其描述方法较多,如齐次变换方法、矩阵指数方法和四元数方法等。
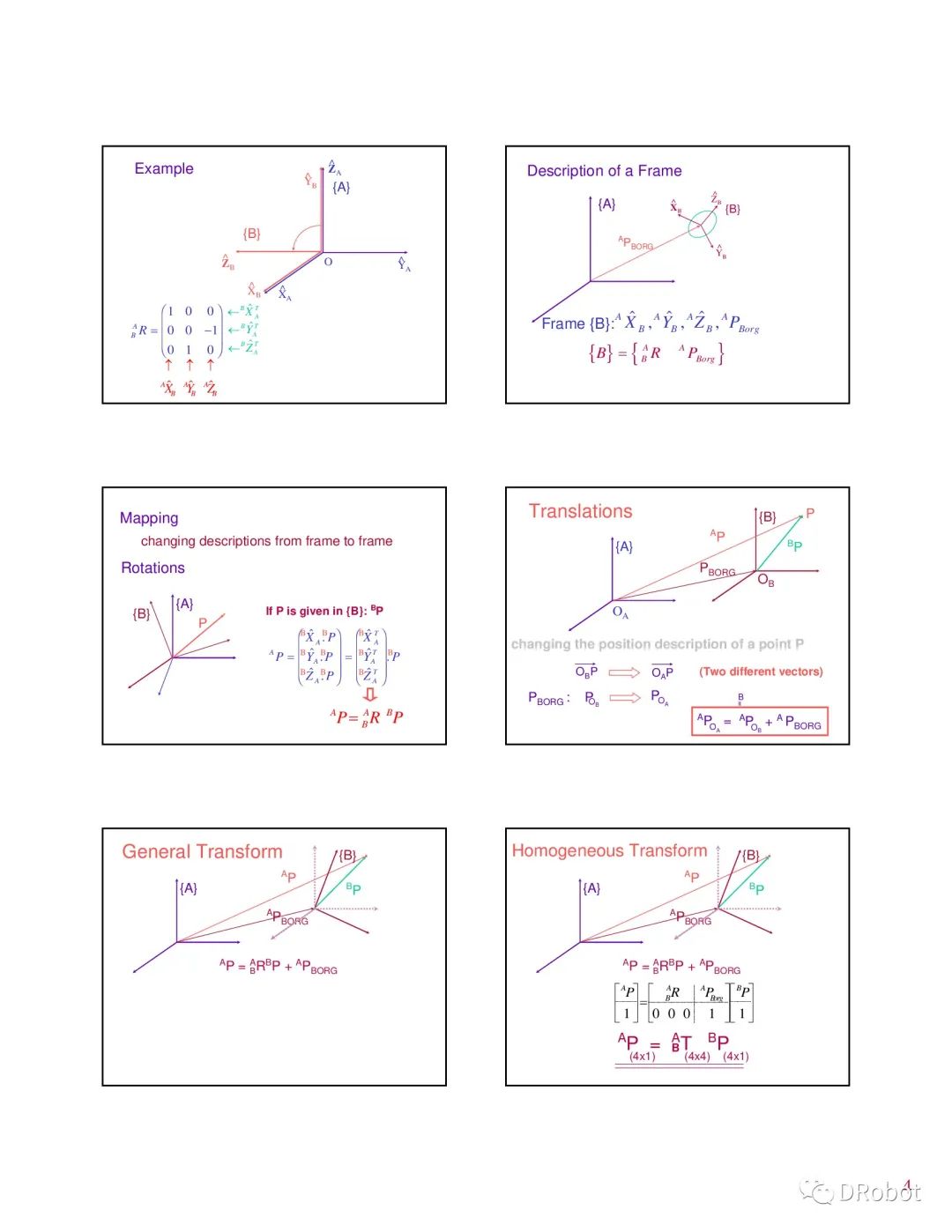
本期讲述了刚体在空间的描述方法,以及不同坐标系相互间转化的齐次变换方法,为后续的机器人运动学、动力学提供理论基础。齐次变换方法的优点在于它将运动、变换和映射与矩阵的运算联系起来,具有明显的几何特征。
最后
以上就是顺心金针菇最近收集整理的关于斯坦福大学《机器人学》-运动学Kinematics的全部内容,更多相关斯坦福大学《机器人学》-运动学Kinematics内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复