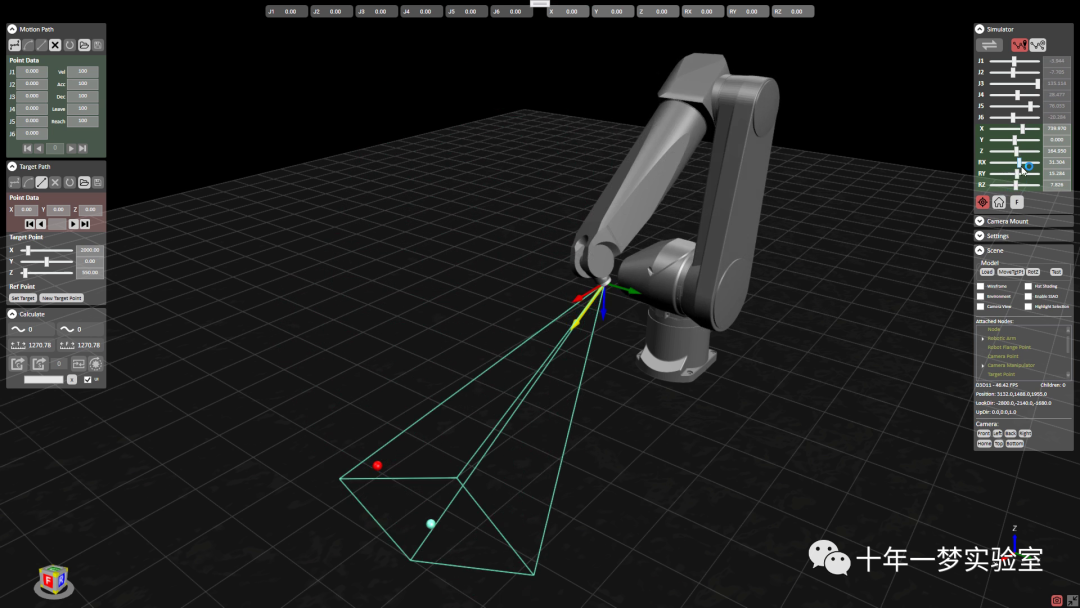
仿真器采用WPF开发,利用HelixToolkit显示场景。 源码中正逆运动学算法基于RoboticsLibrary(c++)开源机器人库封装成dll,通过C#调用计算位置正逆解。从源码得知机械臂挂载相机,可以FK模式控制关节位置,可以IK模式控制TCP位姿。可以设定相机锁定目标点,此时IK模式的tcp旋转不可用。程序还有很多功能没有实现。
仿真器操作演示
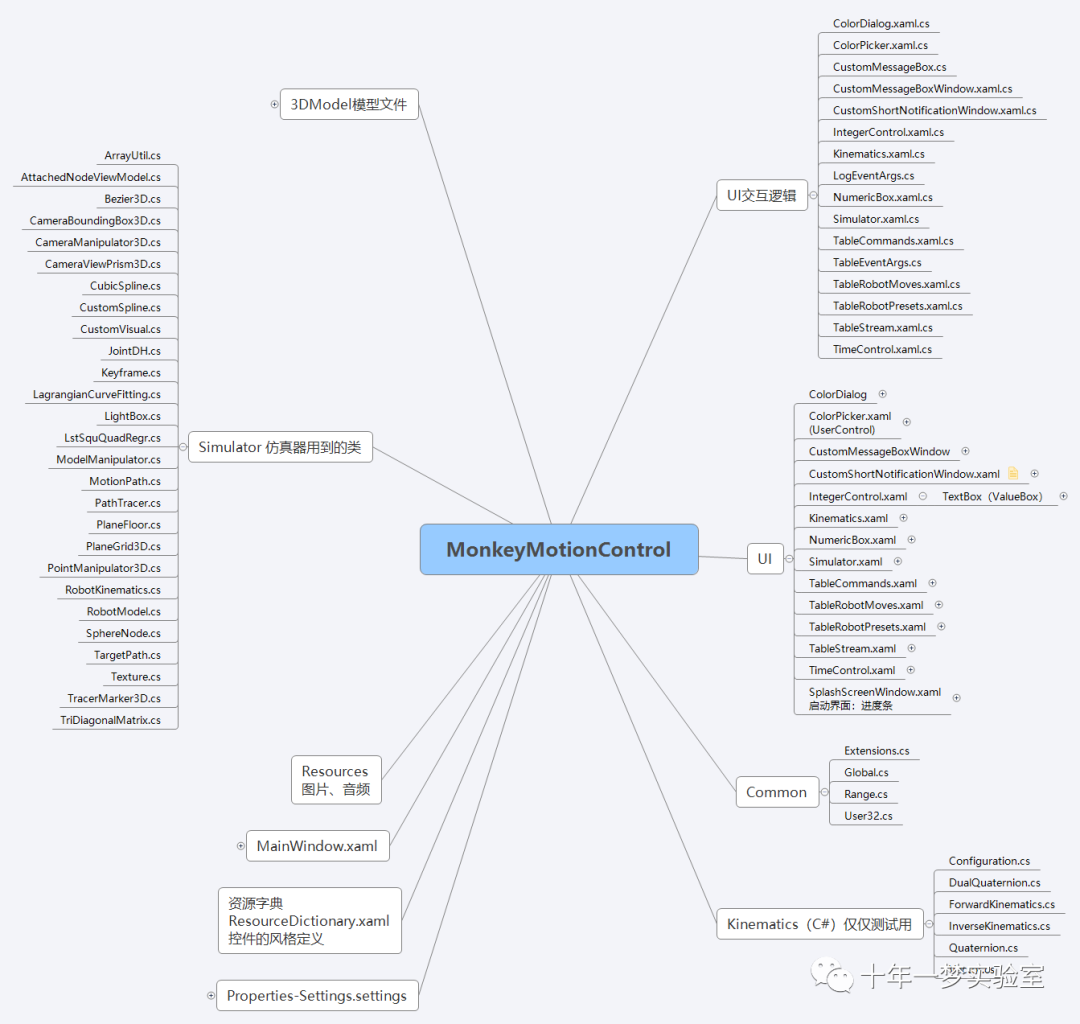
程序框架
源码笔记:
正逆运动学计算:调用(C++)dll
#region KINEMATICS 位置正逆解
/// <summary>
///正运动学机器人库DLL函数调用
/// </summary>
public double[] ForwardKinematics(double j1, double j2, double j3, double j4, double j5, double j6)
{
string path = new FileInfo(Assembly.GetEntryAssembly().Location).Directory.ToString();
string filePath = path + "\helix3d_under_cam.xml";
//if (!bCamType)
// filePath = path + "\helix3d_front_cam.xml";
double[] retArr = new double[6];//正解结果
IntPtr outPtr = Marshal.AllocHGlobal(6 * Marshal.SizeOf<double>());
rlForwardKinematics(filePath, CameraCenterZOffset, j1, j2, j3, j4, j5, j6, outPtr);
Marshal.Copy(outPtr, retArr, 0, 6);
Marshal.FreeHGlobal(outPtr);
//上一笛卡尔tcp位姿
double[] prevCartesians = new double[] {
CurCartPos.X,
CurCartPos.Y,
CurCartPos.Z,
CurCartPos.RX,
CurCartPos.RY,
CurCartPos.RZ
};
//修正正解结果
if (Math.Abs(retArr[3] - prevCartesians[3]) == 180)
{
retArr[3] = prevCartesians[3];
}
if (Math.Abs(retArr[4] - prevCartesians[4]) == 180)
{
retArr[4] = prevCartesians[4];
}
if (Math.Abs(retArr[5] - prevCartesians[5]) == 180)
{
retArr[5] = prevCartesians[5];
}
if (Math.Abs(retArr[3] - prevCartesians[3]) > 90)
{
int signn = 1;
if (retArr[3] < 0) signn = -1;
retArr[3] = -signn * (180 - Math.Abs(retArr[3]));
}
if (Math.Abs(retArr[4] - prevCartesians[4]) > 90)
{
int signn = 1;
if (retArr[4] < 0) signn = -1;
retArr[4] = signn * (180 - Math.Abs(retArr[4]));
if (Math.Abs(retArr[4] - prevCartesians[4]) > 90)
{
signn = 1;
if (retArr[4] < 0) signn = -1;
retArr[4] = signn * (180 - Math.Abs(retArr[4]));
}
}
if (Math.Abs(retArr[5] - prevCartesians[5]) > 90 && Math.Abs(retArr[5] - prevCartesians[5]) < 270)
{
int signn1 = 1;
if (retArr[5] < 0) signn1 = -1;
retArr[5] = -signn1 * (180 - Math.Abs(retArr[5]));
}
//更新当前笛卡尔位姿为新的正解结果
CurCartPos.X = retArr[0];
CurCartPos.Y = retArr[1];
CurCartPos.Z = retArr[2];
CurCartPos.RX = retArr[3];
CurCartPos.RY = retArr[4];
CurCartPos.RZ = retArr[5];
return retArr;
}
/// <summary>
/// 逆运动学机器人库DLL函数调用
/// </summary>
public double[] InverseKinematics(double x, double y, double z, double rx, double ry, double rz)
{
//double[] jointAngles = new double[6] { mainJoints[0].angle, mainJoints[1].angle, mainJoints[2].angle, mainJoints[3].angle, mainJoints[4].angle, mainJoints[5].angle };
//记录当前关节角度
double[] jointAngles = new double[6] {
CurJointPos.J1,
CurJointPos.J2,
CurJointPos.J3,
CurJointPos.J4,
CurJointPos.J5,
CurJointPos.J6
};
int size = Marshal.SizeOf(jointAngles[0]) * jointAngles.Length;//分配空间 字节 6*double(16)
IntPtr prevJoints = Marshal.AllocHGlobal(size);//
Marshal.Copy(jointAngles, 0, prevJoints, jointAngles.Length);//关节角度数组 拷贝到指针prevJoints地址
string path = new FileInfo(Assembly.GetEntryAssembly().Location).Directory.ToString();//获取路径
string filePath = path + "\helix3d_under_cam.xml";//史陶比尔运动学模型 xml文件
//if (!bCamType)
// filePath = path + "\helix3d_front_cam.xml";
double[] retArr = new double[6];//逆解结果
IntPtr outPtr = Marshal.AllocHGlobal(6 * Marshal.SizeOf<double>());//输出
//Stopwatch sw = new Stopwatch();
//sw.Start();
rlInverseKinematics(filePath, CameraCenterZOffset, prevJoints, x, y, z, rx, ry, rz, outPtr);//逆解计算
//sw.Stop();
//parentWindow.Log($"IK Elapsed={sw.Elapsed}");
Marshal.Copy(outPtr, retArr, 0, 6);//逆解输出拷贝到double数组
Marshal.FreeHGlobal(outPtr);//释放分配的资源
Marshal.FreeHGlobal(prevJoints);
//更新当前关节位置
CurJointPos.J1 = retArr[0];
CurJointPos.J2 = retArr[1];
CurJointPos.J3 = retArr[2];
CurJointPos.J4 = retArr[3];
CurJointPos.J5 = retArr[4];
CurJointPos.J6 = retArr[5];
return retArr;
}
#endregion贝塞尔曲线插值
//获取贝塞尔曲线插值点:控制点 p0 p1 p2 p3 https://en.wikipedia.org/wiki/B%C3%A9zier_curve
public static Point3D GetPoint(Point3D p0, Point3D p1, Point3D p2, Point3D p3, float t)
{
if (t < 0)
t = 0;
else if (t > 1)
t = 1;
float oneMinusT = 1f - t;
Point3D ret = new Point3D();
ret.X = oneMinusT* oneMinusT *oneMinusT * p0.X + 3f * oneMinusT * oneMinusT * t * p1.X +
3f * oneMinusT * t * t * p2.X + t * t * t * p3.X;
ret.Y = oneMinusT * oneMinusT * oneMinusT * p0.Y + 3f * oneMinusT * oneMinusT * t * p1.Y +
3f * oneMinusT * t * t * p2.Y + t * t * t * p3.Y;
ret.Z = oneMinusT * oneMinusT * oneMinusT * p0.Z + 3f * oneMinusT * oneMinusT * t * p1.Z +
3f * oneMinusT * t * t * p2.Z + t * t * t * p3.Z;
return ret;
}更新场景中机械臂位姿:
//更新场景中机械臂状态
private void UpdateRoboticArm(double J1, double J2, double J3, double J4, double J5, double J6,
double camOffsetX = 0, double camOffsetY = 0, double camOffsetZ = 0,
double camRotAxisX = 0, double camRotAxisY = 0, double camRotAxisZ = 0)
{
// TODO: Check new joint angles within range limits
//更新场景中关节角度 Update Joints Angles
RobotJoints[0].joint.angle = J1;
RobotJoints[1].joint.angle = J2;
RobotJoints[2].joint.angle = J3;
RobotJoints[3].joint.angle = J4;
RobotJoints[4].joint.angle = J5;
RobotJoints[5].joint.angle = J6;
//更新机器人运动学关节角度(以前的关节) Update Robot Kinematics Joint Angles (Previous Joints)
RobotKinematics.CurJointPos.J1 = J1;
RobotKinematics.CurJointPos.J2 = J2;
RobotKinematics.CurJointPos.J3 = J3;
RobotKinematics.CurJointPos.J4 = J4;
RobotKinematics.CurJointPos.J5 = J5;
RobotKinematics.CurJointPos.J6 = J6;
// 设置变换矩阵 Setup Transformations
Transform3DGroup F1;//J1位姿
Transform3DGroup F2;
Transform3DGroup F3;
Transform3DGroup F4;
Transform3DGroup F5;//J5位姿
Transform3DGroup F6;//J6 和 相机挂载位姿
Transform3DGroup F7;//相机位姿
Transform3DGroup F8;//机器人法兰点位姿
Transform3DGroup F9;//相机边界框位姿
RotateTransform3D R;
TranslateTransform3D T;
F1 = new Transform3DGroup();//单位矩阵4X4
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[0].joint.rotAxisX, (double)RobotJoints[0].joint.rotAxisY, (double)RobotJoints[0].joint.rotAxisZ), J1), new Point3D((double)RobotJoints[0].joint.rotPointX, (double)RobotJoints[0].joint.rotPointY, (double)RobotJoints[0].joint.rotPointZ));
F1.Children.Add(R);//F1=R
F2 = new Transform3DGroup();
T = new TranslateTransform3D(0.0, 0.0, 0.0);
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[1].joint.rotAxisX, (double)RobotJoints[1].joint.rotAxisY, (double)RobotJoints[1].joint.rotAxisZ), J2), new Point3D((double)RobotJoints[1].joint.rotPointX, (double)RobotJoints[1].joint.rotPointY, (double)RobotJoints[1].joint.rotPointZ));
F2.Children.Add(T);
F2.Children.Add(R);
F2.Children.Add(F1);//左乘 F2= F1*R
F3 = new Transform3DGroup();
T = new TranslateTransform3D(0.0, 0.0, 0.0);
//旋转变换:轴角法+平一点
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[2].joint.rotAxisX, (double)RobotJoints[2].joint.rotAxisY, (double)RobotJoints[2].joint.rotAxisZ), J3), new Point3D((double)RobotJoints[2].joint.rotPointX, (double)RobotJoints[2].joint.rotPointY, (double)RobotJoints[2].joint.rotPointZ));
F3.Children.Add(T);
F3.Children.Add(R);
F3.Children.Add(F2);//位姿 F3= F2*R 相对自身动坐标系变换
F4 = new Transform3DGroup();
T = new TranslateTransform3D(0.0, 0.0, 0.0);
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[3].joint.rotAxisX, (double)RobotJoints[3].joint.rotAxisY, (double)RobotJoints[3].joint.rotAxisZ), J4), new Point3D((double)RobotJoints[3].joint.rotPointX, (double)RobotJoints[3].joint.rotPointY, (double)RobotJoints[3].joint.rotPointZ));
F4.Children.Add(T);
F4.Children.Add(R);
F4.Children.Add(F3);//F4=F3*R
F5 = new Transform3DGroup();
T = new TranslateTransform3D(0.0, 0.0, 0.0);
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[4].joint.rotAxisX, (double)RobotJoints[4].joint.rotAxisY, (double)RobotJoints[4].joint.rotAxisZ), J5), new Point3D((double)RobotJoints[4].joint.rotPointX, (double)RobotJoints[4].joint.rotPointY, (double)RobotJoints[4].joint.rotPointZ));
F5.Children.Add(T);
F5.Children.Add(R);
F5.Children.Add(F4);//F5=F4*R
F6 = new Transform3DGroup();
T = new TranslateTransform3D(0.0, 0.0, 0.0);
R = new RotateTransform3D(new AxisAngleRotation3D(new Vector3D((double)RobotJoints[5].joint.rotAxisX, (double)RobotJoints[5].joint.rotAxisY, (double)RobotJoints[5].joint.rotAxisZ), J6), new Point3D((double)RobotJoints[5].joint.rotPointX, (double)RobotJoints[5].joint.rotPointY, (double)RobotJoints[5].joint.rotPointZ));
F6.Children.Add(T);
F6.Children.Add(R);
F6.Children.Add(F5);//F6=F5*R
//F7 = new Transform3DGroup();
//T = new TranslateTransform3D(camOffsetX, camOffsetY, camOffsetZ);
//R = new RotateTransform3D(
// new AxisAngleRotation3D(
// new Vector3D((double)RobotJoints[5].joint.rotAxisX, (double)RobotJoints[5].joint.rotAxisY, (double)RobotJoints[5].joint.rotAxisZ),
// camRotAxisZ),
// new Point3D((double)RobotJoints[5].joint.rotPointX, (double)RobotJoints[5].joint.rotPointY, (double)RobotJoints[5].joint.rotPointZ));
//F7.Children.Add(R);
//R = new RotateTransform3D(
// new AxisAngleRotation3D(
// new Vector3D(1, 0, 0),
// camRotAxisX),
// new Point3D((double)0, (double)0, (double)RobotJoints[5].joint.rotPointZ + 180));
//F7.Children.Add(R);
//R = new RotateTransform3D(
// new AxisAngleRotation3D(
// new Vector3D(0, 1, 0),
// camRotAxisY),
// new Point3D((double)130, (double)0, (double)RobotJoints[5].joint.rotPointZ + 180));
//F7.Children.Add(R);
//F7.Children.Add(T);
//F7.Children.Add(F6);
/// Test ///
F7 = new Transform3DGroup();
T = new TranslateTransform3D(camOffsetX, camOffsetY, camOffsetZ);//相机偏置
R = new RotateTransform3D(
new AxisAngleRotation3D(
new Vector3D(0, 0, 1), camRotAxisZ),//相机绕自身ZZ轴旋转 旋转点J6轴线上
new Point3D((double)RobotJoints[5].joint.rotPointX, (double)RobotJoints[5].joint.rotPointY, (double)RobotJoints[5].joint.rotPointZ + cameraBoundingBox.BoundingBox.SizeZ / 2 + FLANGE_HEIGHT));
F7.Children.Add(R);
R = new RotateTransform3D(
new AxisAngleRotation3D(
new Vector3D(1, 0, 0), camRotAxisX),
new Point3D((double)RobotJoints[5].joint.rotPointX, (double)RobotJoints[5].joint.rotPointY, (double)RobotJoints[5].joint.rotPointZ + cameraBoundingBox.BoundingBox.SizeZ / 2 + FLANGE_HEIGHT));
F7.Children.Add(R);
R = new RotateTransform3D(
new AxisAngleRotation3D(
new Vector3D(0, 1, 0), camRotAxisY),
new Point3D((double)RobotJoints[5].joint.rotPointX, (double)RobotJoints[5].joint.rotPointY, (double)RobotJoints[5].joint.rotPointZ + cameraBoundingBox.BoundingBox.SizeZ / 2 + FLANGE_HEIGHT));
F7.Children.Add(R);
F7.Children.Add(T);
F7.Children.Add(F6);//F7=F6*T*RY*RX*RZ
/// 结束测试End of Test ///
// 应用变换Apply Transformations
foreach (var node in RobotJoints[0].model.Traverse()) // Joint 1
{
if (node is MeshNode m)
{
m.ModelMatrix = F1.ToMatrix();//设置场景节点LINK1的模型矩阵
}
}
foreach (var node in RobotJoints[1].model.Traverse()) // Joint 2
{
if (node is MeshNode m)
{
m.ModelMatrix = F2.ToMatrix();//设置场景节点LINK2的模型矩阵
}
}
foreach (var node in RobotJoints[2].model.Traverse()) // Joint 3
{
if (node is MeshNode m)
{
m.ModelMatrix = F3.ToMatrix();//设置场景节点LINK3的模型矩阵
}
}
foreach (var node in RobotJoints[3].model.Traverse()) // Joint 4
{
if (node is MeshNode m)
{
m.ModelMatrix = F4.ToMatrix();//设置场景节点LINK4的模型矩阵
}
}
foreach (var node in RobotJoints[4].model.Traverse()) // Joint 5
{
if (node is MeshNode m)
{
m.ModelMatrix = F5.ToMatrix();//设置场景节点LINK5的模型矩阵
}
}
foreach (var node in RobotJoints[5].model.Traverse()) // Joint 6
{
if (node is MeshNode m)
{
m.ModelMatrix = F6.ToMatrix();//设置场景节点LINK6的模型矩阵
}
}
foreach (var node in RobotJoints[7].model.Traverse()) //相机挂载 Camera Mount
{
if (node is MeshNode m)
{
m.ModelMatrix = F6.ToMatrix();//设置场景节点相机挂载的模型矩阵
}
}
foreach (var node in RobotJoints[8].model.Traverse()) //相机 Camera
{
if (node is MeshNode m)
{
m.ModelMatrix = F7.ToMatrix();//设置场景节点相机的模型矩阵
}
}
// 法兰点Flange Point
double flangePointOffsetX = RobotJoints[5].joint.rotPointX;
double flangePointOffsetY = 0;
double flangePointOffsetZ = RobotJoints[5].joint.rotPointZ;
F8 = new Transform3DGroup(); // 法兰点的变换矩阵Transform Group for Flange Point
T = new TranslateTransform3D(flangePointOffsetX, flangePointOffsetY, flangePointOffsetZ);//法兰原点偏置位姿
F8.Children.Add(T);
F8.Children.Add(F7);//F8=F7*T
robotFlangePoint.ModelMatrix = F8.ToMatrix();//设置场景中机器人法兰点的模型矩阵
//相机边界框 Camera Bounding Box
double boxOffsetX = 0;
double boxOffsetY = 0;
double boxOffsetZ = RobotJoints[5].joint.rotPointZ + (cameraBoundingBox.BoundingBox.SizeZ / 2);
if (CameraMount == ToolPlacement.BOTTOM)
{
boxOffsetX = cameraBoundingBox.BoundingBox.SizeX / 2;
}
else if (CameraMount == ToolPlacement.FRONT)
{
boxOffsetX = cameraBoundingBox.BoundingBox.SizeX - 20;
}
else { }
F9 = new Transform3DGroup(); //相机边框变换组
T = new TranslateTransform3D(boxOffsetX, boxOffsetY, boxOffsetZ + FLANGE_HEIGHT);
F9.Children.Add(T);
F9.Children.Add(F7);
cameraBoundingBox.SceneNode.ModelMatrix = F9.ToMatrix();//设置相机边界框的模型矩阵
if (IsPathTracingEnabled)//启用路径跟踪
{
var toolPosition = new Vector3(
(float)slider_X.Value,
(float)slider_Y.Value,
(float)slider_Z.Value + RobotFlangeOffset.Z
);//工具位置:根据滑动条值确定
Tracer_AddPoint(toolPosition);//工具tcp点添加到路径跟踪器
}
}参考:
https://github.com/helix-toolkit/helix-toolkit
https://www.roboticslibrary.org/
https://en.wikipedia.org/wiki/B%C3%A9zier_curve#Cubic_B%C3%A9zier_curves 贝塞尔曲线插值
https://www.cnblogs.com/hnfxs/p/3148743.html贝塞尔曲线插值
The End
最后
以上就是冷静蜻蜓最近收集整理的关于【WPF-HelixToolkit】史陶比尔RX160L 机器人仿真器源码学习的全部内容,更多相关【WPF-HelixToolkit】史陶比尔RX160L内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复