1. 安装:
去官网 http://www.roboware.me/#/ 下载安装包后正常安装即可。
2. 配置:
安装后会提示git不是最新版本,依次执行下面的命令可更新至最新版:
git --version
sudo add-apt-repository ppa:git-core/ppa
sudo apt-get update
sudo apt-get install git
git --version3. 使用:
3.1 基础教程
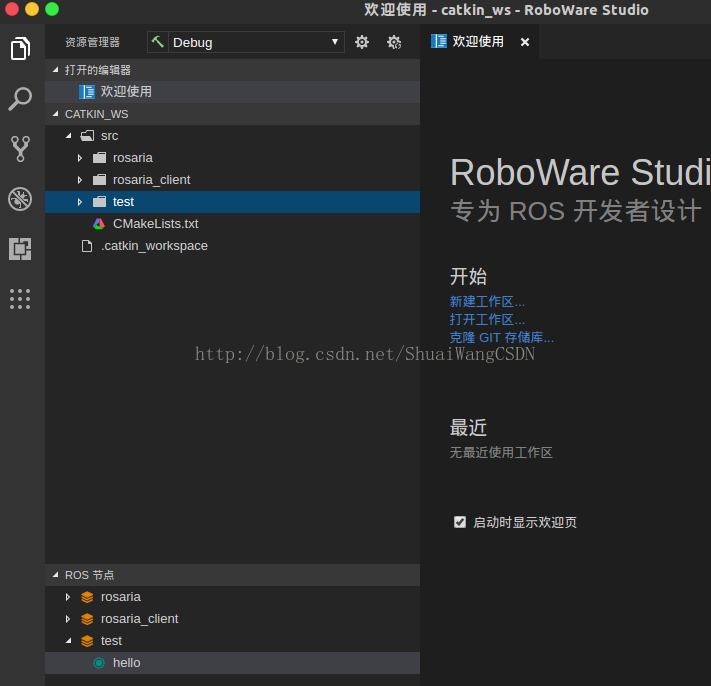
1. 安装后打开roboware,选择新建工作区或打开原有的工作区,因系统内已有之前建立的工作空间,且已配置好环境,故此处直接打开catkin_ws即可,打开后如下图所示,可见,使用IDE相比直接在终端下编程,文件的组织结构一目了然,并且可以免去编译时更新CMakeLists.txt 等操作,确实方便了很多。
3. 建好ROS包后,右键该ROS包可以添加msg、srv等文件夹,这些以后会用到;
这里就在src文件夹下新建一个cpp文件,取名后选择 加入新的可执行文件中;
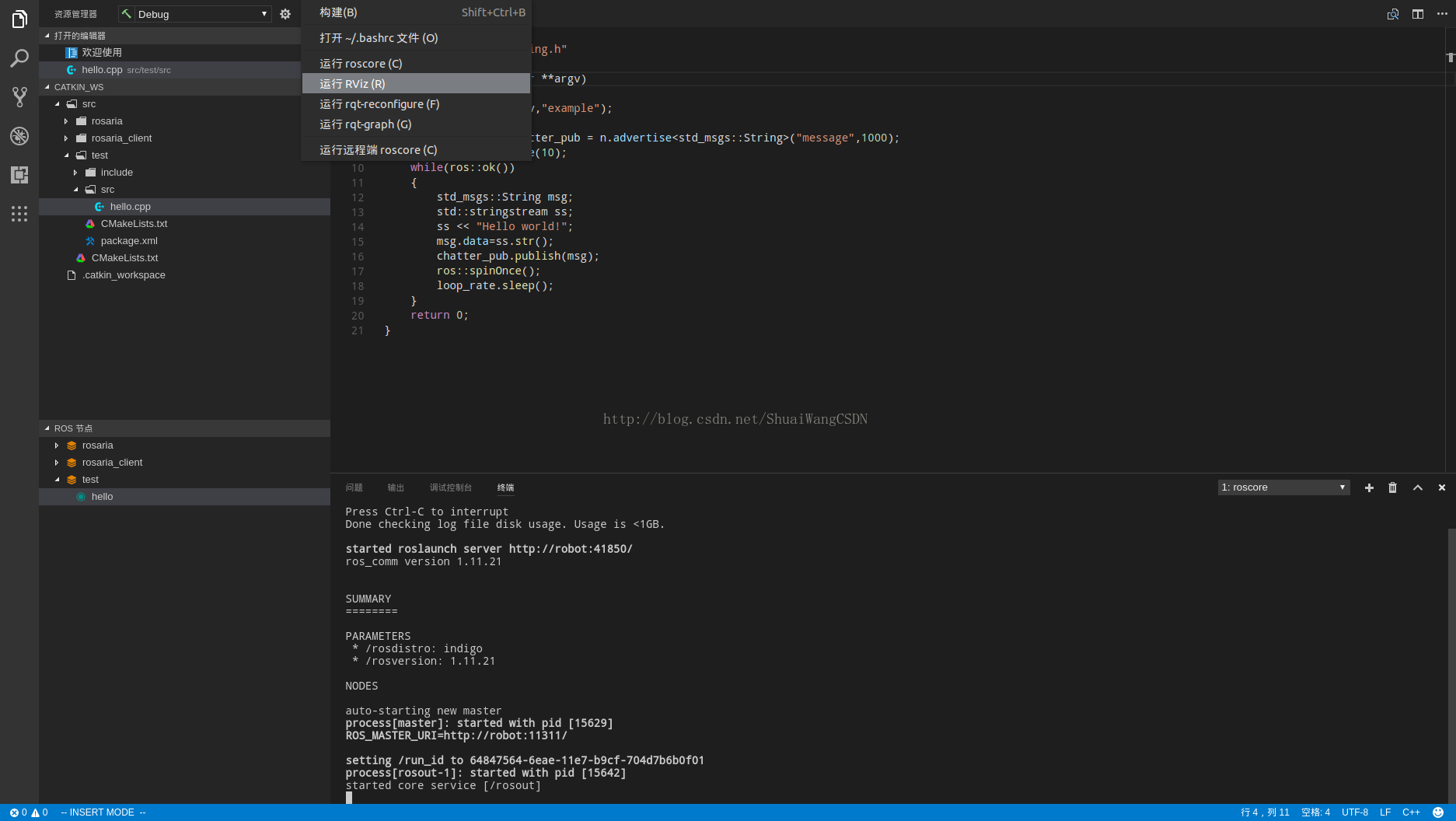
4. 粘贴如下代码进行测试:
#include "ros/ros.h"
#include "std_msgs/String.h"
#include <sstream>
int main(int argc, char **argv)
{
ros::init(argc,argv,"example");
ros::NodeHandle n;
ros::Publisher chatter_pub = n.advertise<std_msgs::String>("message",1000);
ros::Rate loop_rate(10);
while(ros::ok())
{
std_msgs::String msg;
std::stringstream ss;
ss << "Hello world!";
msg.data=ss.str();
chatter_pub.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
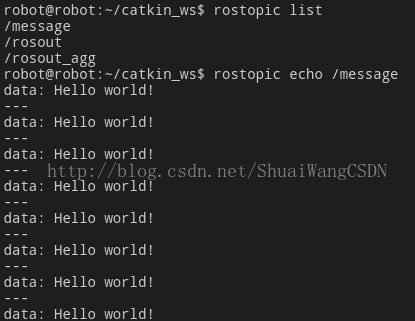
}5. 点击左上角的锤子运行选定构建任务或者ctrl+shift+B,进行编译; 6. 点击上方菜单栏ROS(最大化后才能看到菜单栏),运行roscore,当然你要在终端中运行也是可以的; 然后在下方出现的终端中,点击右侧的加号新开一个终端, 运行 rosrun test hello
更多使用教程,见:http://www.zhimengzhe.com/bianchengjiaocheng/qitabiancheng/198333.html
最后
以上就是热情小兔子最近收集整理的关于ROS IDE - RoboWare Studio 安装与使用教程的全部内容,更多相关ROS内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复