相机自动对焦AF原理
AF性能是判断相机好坏的重要指标,主要从准确度和速度两个方面来进行考察,本文将介绍自动对焦的几种方式。
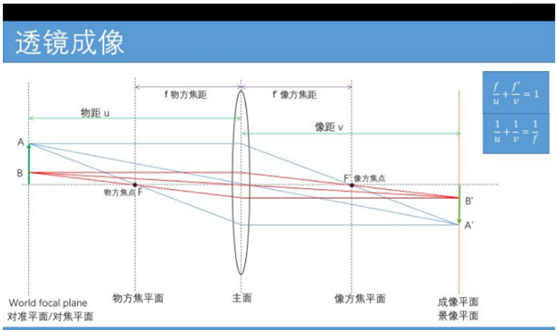
一.凸透镜成像原理
二.三种对焦方法
有公式在手,只要给相机安个测距仪就好了,测距仪的精度越高对焦就越准,成像就越清晰,在这种想法的驱动下,主动式对焦就应运而生了,在大部分不计代价的领域,主动式对焦是很受欢迎的方法。
但是在很多地方,尤其是民用市场,想要给相机按上一个高精度测距仪,代价无疑是很高的,有没有其他办法实现对焦?很明显,就是刚才提到的物理实验所采用的的探索法,让改变镜头与CMOS之间的距离,总能找到成像的最佳位置。
在这种想法的作用下,被动式对焦就应运而生了,主要是以额外硬件为代价的相位法和基于软件的对比度法。
自动对焦目前主流的大致上有CDAF,PDAF和Laser
assist AF这三种。前两种属于被动式,也就是说相机不需要其他额外辅助的探测手段,直接使用入射光线做判断来对焦;而第三种属于主动式,也就是说需要使用Laser来辅助探测,这在后面会详细介绍。
1. CDAF (contrast detection auto focus)
反差对焦是假设对焦成功后相邻像素点的对比度最大,这种方式的光学设计是最简单的。
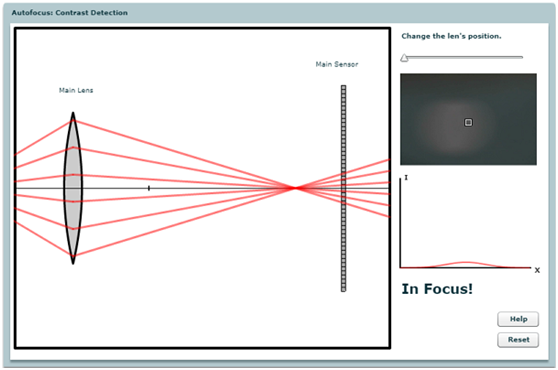
从上图可以看到,右上图中的白色方框代表对焦点,此处反射出的红色光线在经过镜头,到达传感器前就汇聚在一点,随后又散开,此时图像的对比度是很低的。
将这个对焦点与相邻像素的对比度作分析得出右下角的曲线,失焦状态下对比度低,在聚焦过程中,曲线变得逐渐变得倾斜,但是不能判断什么时候是最高点,只有经过了对焦点后曲线下降再往回移动,反复移动后可以得到一个局部梯度最大值,就认为是对焦成功。
详细过程可以从这个链接可以看到。
优点:光学设计简单。
缺点:
a. 速度较慢,在出现失焦图像时,机器无法判断该移动多少,甚至往哪个方向移动镜头才能聚焦,甚至到了峰值也不知道,必须移动过了以后再往回移动,来回几次后才能找到对焦点;
b. 在物体对比度较低时会对焦失败,比如雪景,无云的蓝天以及各种纯色的图像。
2. PDAF (phase detect
auto focus)
相位对焦最早是在单反上使用的,也是最常用的被动式对焦方法,光学通路也比较复杂。
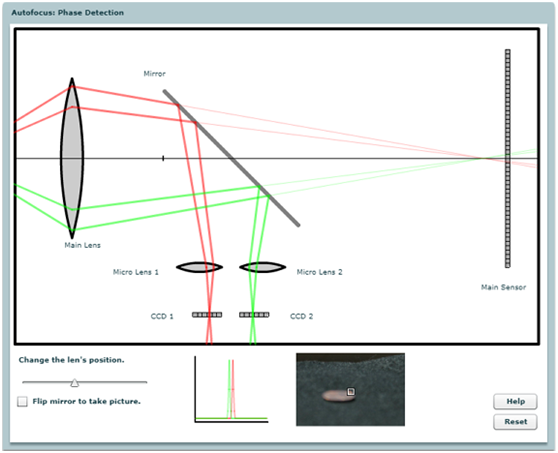
在对焦过程中,白色入射光被一个斜45度角的反光镜拦截,部分向上分光到调焦屏,供预览和AE使用,此时预览看到的图像和拍照的是一致的;剩下的光被次级反射镜向下分到AF模块。
可以从下图中看到AF模块的工作原理。AF模块中有两个或者多个小图像传感器(CCD1/2),并且都是一维的,也就是说是由一列像素构成,每个传感器上有一个小的透镜(Micro lens),这些传感器是成对出现,每一对就构成了一个自动对焦点,下图中的对焦点是右下侧图片中央的白色方框。在失焦状态下,红光照射在光圈右侧,绿光照射在光圈左侧,在传感器上的相位就无法匹配,图像中央其实是一个硬币,但为了方便将相位表示成只有一个峰值的曲线,也就是一个黑色背景的白点,真实图像的曲线实际上比较复杂。当移动镜头Main lens的时候,光线的相位会慢慢靠近直至重合,当重合时就认为对焦成功。在图像处理中识别相位重合的方式有很多种,Cross-correlation就是其中一种。由于根据相差可以精确计算出main
lens需要移动的方向以及距离,因此PDAF就比CDAF速度要快许多。
由于对焦速度快,在2014年左右被全面引入到手机上,然而手机上没有足够空间来实现如此复杂的光学通路,因此业界就拿sensor做文章,如下图所示在原有的
(a)Bayer CFA sensor基础上将部分G替换成
(b)PD 像素,变成了
© PDAF sensor。
测距原理就是发出一组超声波,接收器根据超声波的返回时间来计算距离;同样在单反上的激光辅助对焦是发出一组红外光,根据接收到的时间来计算距离。
优点:
激光辅助对焦完美地补充了PDAF在弱光条件下,以及CDAF在对比度底场景下的不足。
缺点:
a. 所谓激光其实是红外线光,因此在物体本身有红外射线(比如烛光,人脸)的情况下就会失效;
b. 如果有红外射线无法穿透玻璃,因此有玻璃情况下也会失效。
这样也就无需改变原有的光学通路,直接根据PDAF计算出相差来移动镜头。当然这些被PD像素所取代的像素点必须根据周围像素点的值来做补偿,具体补偿方式就由各ISP厂商来决定。
优点:速度快。
缺点:
a. 需要专用PDAF sensor,并且有精度损失;
b. 在暗处效果较差,无法完全取代CDAF。
3. Laser Assit AF
激光辅助对焦在单反上的前生是潜艇的超声波测距系统。
超声波测距原理就是发出一组超声波,接收器根据超声波的返回时间来计算距离;同样在单反上的激光辅助对焦是发出一组红外光,根据接收到的时间来计算距离。
优点:
激光辅助对焦完美地补充了PDAF在弱光条件下,以及CDAF在对比度底场景下的不足。
缺点:
a. 所谓激光其实是红外线光,因此在物体本身有红外射线(比如烛光,人脸)的情况下就会失效;
b. 如果有红外射线无法穿透玻璃,因此有玻璃情况下也会失效。
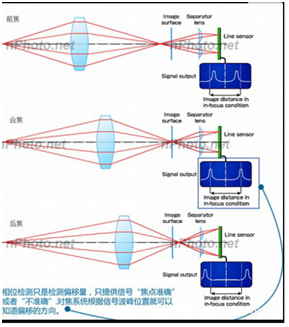
相位法
相位法是直接通过硬件计算出当前成像的位置是在真正相平面哪一侧的方法,如图所示:
三.对比度法
这种方法很多地方都叫做反差法,但是通过研究其原理,我认为还是叫对比度法比较准确。原理可以通过下面的动图描述:
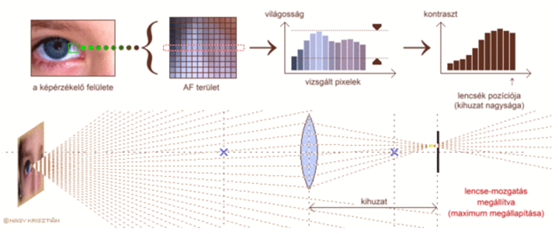
这下应该不用多解释了,如果还是不明白,那我就简单说明一下:
它实际上是选的一行像素,统计各像素亮度,并计算最亮和最暗的差值作为对比度保存;
尝试往一个方向移动镜片(或者CMOS),如果差值变小则说明方向错误,需要反向移动;
反之继续移动,直到差值经过某个值之后开始变小,说明该值即对比度最大值;
镜片(或者CMOS)反向移动到对比对最大的位置。
最后
以上就是追寻荔枝最近收集整理的关于相机自动对焦AF原理的全部内容,更多相关相机自动对焦AF原理内容请搜索靠谱客的其他文章。








发表评论 取消回复