对于EGO--Planner开源算法,想要查阅无人机当前位置,但无从下手,后面与同门不断探讨和实验,终于找到,以此篇文章记录一下心得。
首先运行ego_planner算法相关启动代码:
1、sh shfiles/rspx4.sh
2、roslaunch px4ctrl run_ctrl.launch
3、roslaunch ego-planner single_run_in_exp.launch
4、roslaunch ego_planner rviz.launch
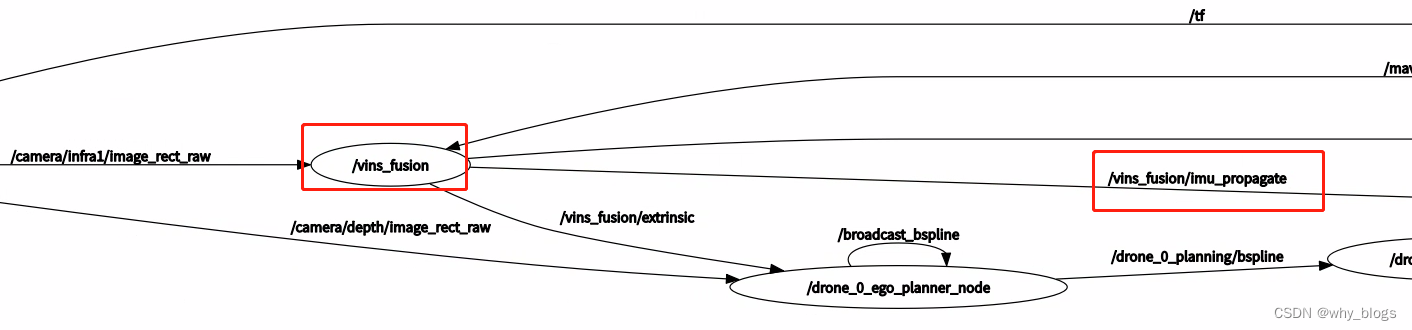
之后查看rqt_graph框图,发现处理后的数据由节点/vins_fusion发布,话题名为vins_fusion/imu_propagate。
至此找到发布无人机当前位置的话题,但是由于纯小白,竟然不知道如何通过话题名查看它的消息类型,最后查阅ROS相关资料,对ROS节点、话题进行如下总结:
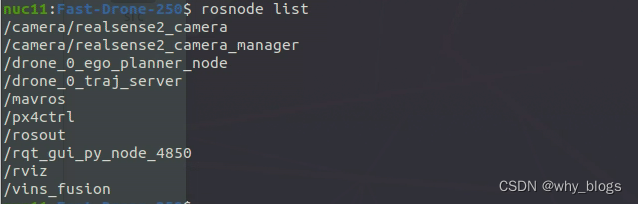
1、rosnode list : 查看所有运行的节点
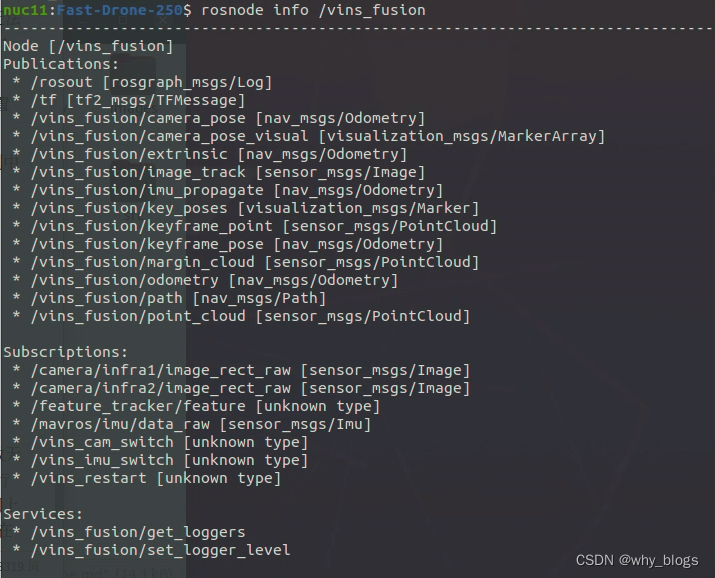
2、rosnode info 节点名: 查看某个节点详细信息,如节点名、该节点发布哪些话题、订阅的话题、话题的类型、服务等。
3、rostopic type 话题名 :查看该话题消息类型

4、rostopic info 话题名 :查看该话题消息类型、 发布者、订阅者

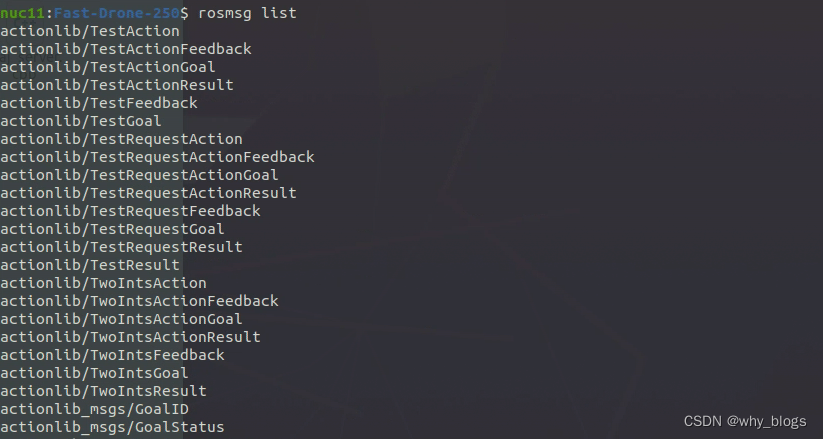
5、rosmsg list : 查看所有消息类型
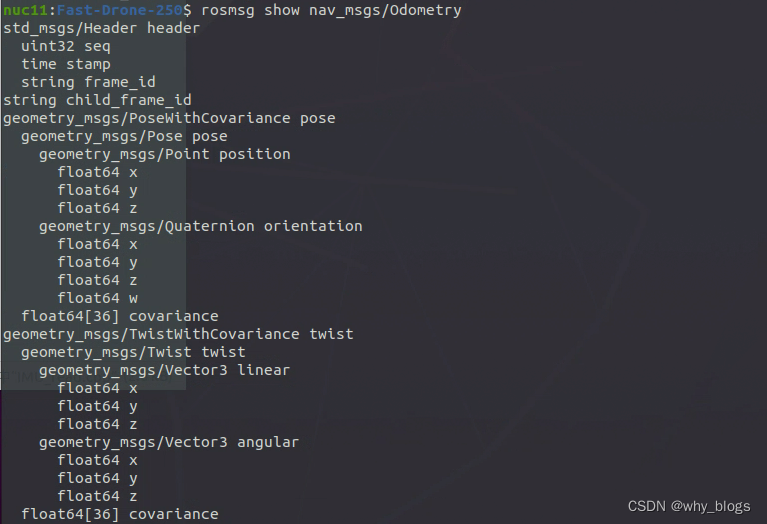
6、查看某个消息类型内部的数据结构
小结:
1、话题、服务都属于节点发布
2、消息类型可通过话题查阅
3、数据结构可通过消息类型查阅
最后
以上就是复杂睫毛最近收集整理的关于ROS话题节点项目小结(小白心得)的全部内容,更多相关ROS话题节点项目小结(小白心得)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复