这篇文章讲一下如何点亮一个新的sensor,以在RK3588平台,点亮IMX577为例。
目录
(1)如何才能算点亮一个sensor?
(2)SENSOR_TYPE_RAW和SENSOR_TYPE_SOC
(3)sensor驱动移植
①sensor寄存器配置
②sensor上电时序
③v4l2_subdev_ops相关回调函数实现
④V4L2控制
⑤驱动注册入口函数probe
(4)dts配置解析
(5)驱动调试
(6)安卓cameraHAL注册sensor
(7)总结
(1)如何才能算点亮一个sensor?
①sensor的chipID可以通过i2c正确读取到,也就是i2c可以正常通信;
②使用media-ctl工具可以看到pipeline,可以看到sensor具体的分辨率和格式;
③使用V4L2工具抓图没有报错,有正常的数据输出,且使用V4L2的命令可以实现曝光增益等的控制,即可认为驱动没问题;
④xml配置SOC模式下,使用apk可以预览出图(图像可能会偏暗偏绿,后续再讲xml如何配置),到这一步可认为HAL没问题;
⑤自行移植其他sensor的效果文件,可以出图(图像效果可能会有异常,后续再讲如何初步修改效果文件),到这一步接下去就可以开始sensor的效果调试,如果需要找RK调试效果,也必须进行到这一步。
(2)SENSOR_TYPE_RAW和SENSOR_TYPE_SOC
这是配置给cameraHAL,确认sensor是什么类型。
SENSOR_TYPE_RAW:一般是RAWRGB的sensor,需要turnning 3A效果才能正常出图,需要正确的效果文件路径,才可以使用;
SENSOR_TYPE_SOC:一般是输出YUV或者RGB888/RGB565之类的sensor,不需要跑3A效果,一般用于自带ISP的sensor,不需要效果文件就可以使用;
一般调试RAW sensor过程中,如果使用V4L2已经可以抓图,那么可以先将sensor配置成SENSOR_TYPE_SOC模式,确认不跑3A情况下是否可以出图。
(3)sensor驱动移植
sensor的驱动位于drivers/media/i2c下,sensor驱动和RKCIF、RKISP控制器的驱动独立,二者异步注册,通过v4l2和media-framework框架,将pipeline连接。这里主要介绍一下sensor驱动的代码,dts配置等。sensor驱动主要分为几个部分:
①sensor寄存器配置
在supported_modes来定义不同的初始化mode,主要配置分辨率、图像格式、帧率、寄存器初始化列表等等,寄存器初始化列表,可直接按照厂家提供的填写。hts_def和vts_def可直接按照寄存器初始化列表填入值即可,exp_def可以看下datesheet是否有默认值,或者一般填写比vts略小。
static const struct imx577_mode supported_modes[] = {
{
.width = 4056,
.height = 3040,
.max_fps = {
.numerator = 10000,
.denominator = 300000,
},
.exp_def = 0x0c10,
.hts_def = 0x2318,
.vts_def = 0x0c2c,
.bpp = 10,
.bus_fmt = MEDIA_BUS_FMT_SRGGB10_1X10,
.reg_list = imx577_linear_10bit_4056x3040_30fps_regs,
.hdr_mode = NO_HDR,
.link_freq_idx = 1,
.vc[PAD0] = V4L2_MBUS_CSI2_CHANNEL_0,
},②sensor上电时序
不同的sensor上电时序不同,有的sensor对时序要求不严格,有的sensor则需要严格按照时序进行上电,否则可能会出现i2c不通的现象。
sensor的datasheet一般都有上电时序图,驱动代码中,按照时序配置即可,imx577上电时序如下,同样的,下电时序也需要按照datasheet描述实现。
static int __imx577_power_on(struct imx577 *imx577)
{
int ret;
u32 delay_us;
struct device *dev = &imx577->client->dev;
if (!IS_ERR(imx577->power_gpio))
gpiod_set_value_cansleep(imx577->power_gpio, 1);
usleep_range(1000, 2000);
if (!IS_ERR_OR_NULL(imx577->pins_default)) {
ret = pinctrl_select_state(imx577->pinctrl,
imx577->pins_default);
if (ret < 0)
dev_err(dev, "could not set pinsn");
}
ret = clk_set_rate(imx577->xvclk, IMX577_XVCLK_FREQ);
if (ret < 0)
dev_warn(dev, "Failed to set xvclk rate (24MHz)n");
if (clk_get_rate(imx577->xvclk) != IMX577_XVCLK_FREQ)
dev_warn(dev, "xvclk mismatched, modes are based on 24MHzn");
ret = clk_prepare_enable(imx577->xvclk);
if (ret < 0) {
dev_err(dev, "Failed to enable xvclkn");
return ret;
}
if (!IS_ERR(imx577->reset_gpio))
gpiod_set_value_cansleep(imx577->reset_gpio, 0);
ret = regulator_bulk_enable(IMX577_NUM_SUPPLIES, imx577->supplies);
if (ret < 0) {
dev_err(dev, "Failed to enable regulatorsn");
goto disable_clk;
}
if (!IS_ERR(imx577->reset_gpio))
gpiod_set_value_cansleep(imx577->reset_gpio, 1);
usleep_range(500, 1000);
if (!IS_ERR(imx577->pwdn_gpio))
gpiod_set_value_cansleep(imx577->pwdn_gpio, 1);
/* 8192 cycles prior to first SCCB transaction */
delay_us = imx577_cal_delay(8192);
usleep_range(delay_us, delay_us * 2);
return 0;
disable_clk:
clk_disable_unprepare(imx577->xvclk);
return ret;
}③v4l2_subdev_ops相关回调函数实现
v4l2_subdev_ops是框架控制sensor驱动的核心,这里介绍一下几个必不可少的回调函数:
-
.s_power,上下电函数,camera上下电的时候会调用这个地方。一般会用到pm_rntime来管理。
-
.ioctl,提供ioctl的接口。
-
s_stream,开关数据流的接口,包括stream on和stream off
-
.enum_mbus_code,枚举驱动支持的图像格式。
-
.enum_frame_size,枚举驱动支持的分辨率
-
.enum_frame_interval,这里除了反馈驱动支持的格式分辨率帧率以外,还有HDR模式的时候,也需要通过fie->reserved[0]成员进行反馈。
-
.get_fmt,获取sensor当前的format
-
.set_fmt,设置sensor的format
-
.get_selection,获取裁减信息
-
.get_mbus_config,获取bus配置,包括mipi/dvp接口,lane数,极性等等。
④V4L2控制
一般raw sensor需要控制exposure、gain、vblank等等,所以需要实现对应的接口函数
- imx577_initialize_controls声明该驱动需要哪些control,并设置调整范围等信息。
- imx577_set_ctrl接口,实现对exposure、gain、vblank的控制。
⑤驱动注册入口函数probe
在驱动注册的函数中,除了对dts的解析,获取时钟电源等等,比较重要的是media entity、V4L2 subdev的注册。关键点如下:
- v4l2_i2c_subdev_init(),注册为一个 v4l2 subdev,参数中提供回调函数。
- imx577_initialize_controls 初始化 v4l2 controls。
- media_entity_init(),注册成为一个 media entity。
- v4l2_async_register_subdev(),声明 Sensor 需要异步注册。因为 RKISP 及 RKCIF 都采用异步注册Sub Device,所以需要这个调用。
(4)dts配置解析
&csi2_dphy0 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi_in_ucam0: endpoint@1 {
reg = <1>;
remote-endpoint = <&imx577_out0>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
csidphy0_out: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi2_csi2_input>;
data-lanes = <1 2 3 4>;
};
};
};
};
&i2c3 {
status = "okay";
pinctrl-0 = <&i2c3m0_xfer>;
imx577: imx577@1a {
compatible = "sony,imx577";
reg = <0x1a>;
clocks = <&cru CLK_MIPI_CAMARAOUT_M3>;
clock-names = "xvclk";
pinctrl-names = "default";
pinctrl-0 = <&mipim0_camera3_clk>;
power-domains = <&power RK3588_PD_VI>;
pwdn-gpios = <&gpio1 RK_PB3 GPIO_ACTIVE_HIGH>;
// reset-gpios = <&gpio1 RK_PA7 GPIO_ACTIVE_HIGH>;
// power-gpios = <&gpio1 RK_PA7 GPIO_ACTIVE_HIGH>;
avdd-supply = <&vcc_mipicsi0>;
rockchip,camera-module-index = <0>;
rockchip,camera-module-facing = "back";
rockchip,camera-module-name = "default";
rockchip,camera-module-lens-name = "default";
port {
imx577_out0: endpoint {
remote-endpoint = <&mipi_in_ucam0>;
data-lanes = <1 2 3 4>;
};
};
};
};
&csi2_dphy0_hw {
status = "okay";
};
&mipi2_csi2 {
status = "okay";
ports {
#address-cells = <1>;
#size-cells = <0>;
port@0 {
reg = <0>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_input: endpoint@1 {
reg = <1>;
remote-endpoint = <&csidphy0_out>;
data-lanes = <1 2 3 4>;
};
};
port@1 {
reg = <1>;
#address-cells = <1>;
#size-cells = <0>;
mipi2_csi2_output: endpoint@0 {
reg = <0>;
remote-endpoint = <&cif_mipi_in2>;
data-lanes = <1 2 3 4>;
};
};
};
};
&rkcif {
status = "okay";
};
&rkcif_mipi_lvds2 {
status = "okay";
port {
cif_mipi_in2: endpoint {
remote-endpoint = <&mipi2_csi2_output>;
};
};
};
&rkcif_mipi_lvds2_sditf {
status = "okay";
port {
mipi_lvds2_sditf: endpoint {
remote-endpoint = <&isp0_vir0>;
};
};
};
&rkcif_mmu {
status = "okay";
};
&rkisp0 {
status = "okay";
};
&isp0_mmu {
status = "okay";
};
&rkisp0_vir0 {
status = "okay";
// rockchip,hw = <&rkisp_unite>;
port {
#address-cells = <1>;
#size-cells = <0>;
isp0_vir0: endpoint@0 {
reg = <0>;
remote-endpoint = <&mipi_lvds2_sditf>;
};
};
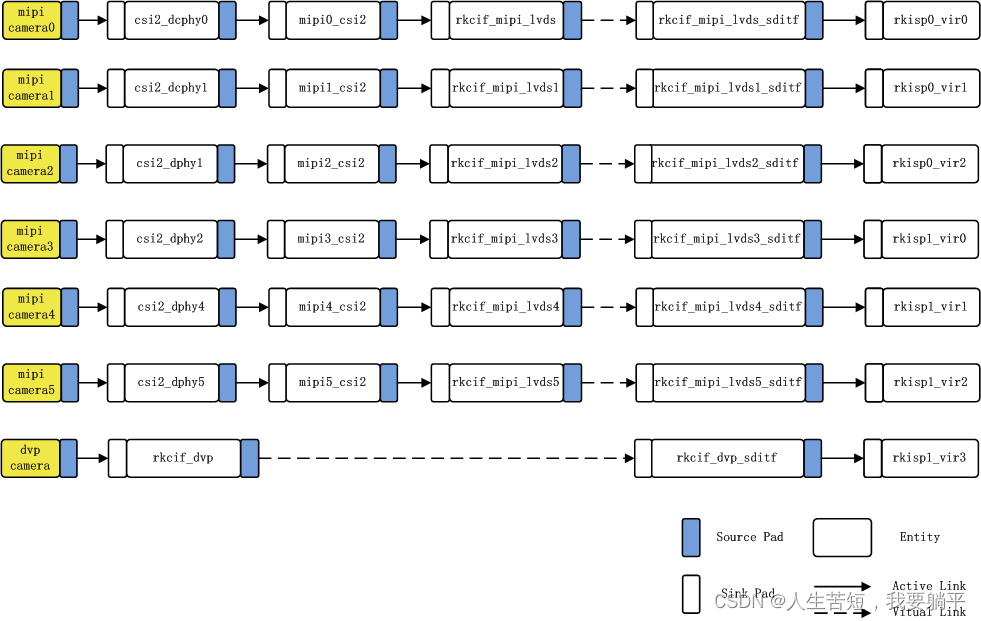
};dts的配置主要是pipeline的配置,可参考RK官方的描述,7路camera对应的配置如下:
(5)驱动调试
sensor的驱动调试主要有以下关键点:
①移植sensor驱动:参考上述的介绍进行驱动代码的移植;
②根据使用的mipi接口来配置对应的dts,rk3588支持多个camera,因此这个步骤必须正确;
③确认i2c是否通讯成功,i2c通信成功才能正确设置sensor的寄存器;
④media-ctl 工具查看拓扑结构是否正常
⑤使用V4L2抓取图像,设置exp、gain等参数可以生效。
(6)安卓cameraHAL注册sensor
驱动调试完毕,还需要再HAL注册sensor,才能使用apk点亮。HAL获取sensor是通过解析xml文件的,对应设备的/vendor/etc/camera/camera3_profiles.xml,对应SDK代码的SDK/hardware/rockchip/camera/etc/camera/camera3_profiles_rk3588.xml。
①初步点亮的时候,可以先复制其他sensor的配置,修改name参数,对应驱动代码的中的名字,必须一致;
②修改moduleID参数,该参数对应dts的index,必须一致否则无法注册;
③修改添加该sensor对应的分辨率帧率等。
④dumpsys media.camera命令可以查看是否成功注册sensor,如果没有注册上,一般是xml配置错误,检查name和moduleID这两个属性。
⑤初步调试,还没效果文件,可以先设置SOC模式进行点亮,turnning完毕之后改成RAW模式。
(7)总结
总结一下,一个camera的初步点亮,主要就是驱动、HAL配置完成,即可使用apk预览。后面再详细说一下i2c通信失败排查、常用的调试手段、XML文件的配置解释以及常见的调试问题分析。
最后
以上就是爱撒娇蓝天最近收集整理的关于camera调试:RK3588如何点亮一个sensor?(1)如何才能算点亮一个sensor?(2)SENSOR_TYPE_RAW和SENSOR_TYPE_SOC(3)sensor驱动移植(4)dts配置解析(5)驱动调试(6)安卓cameraHAL注册sensor(7)总结的全部内容,更多相关camera调试:RK3588如何点亮一个sensor内容请搜索靠谱客的其他文章。

![[Camera]RK_Camera_HAL概述Android Camera HAL简介RK Camera HAL整体框架RK Camera HAL 调用流程](https://www.shuijiaxian.com/files_image/reation/bcimg12.png)

![[AndroidO] [RK3399] -- GPIO驱动与控制方式](https://www.shuijiaxian.com/files_image/reation/bcimg14.png)




发表评论 取消回复