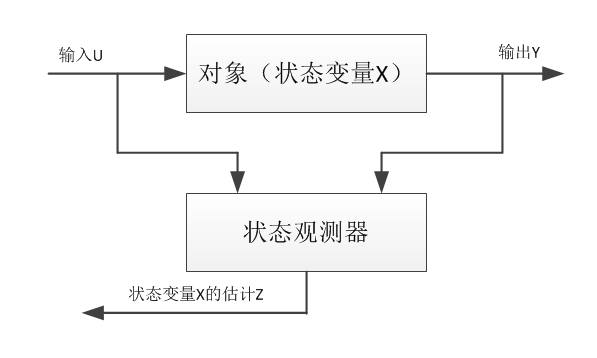
状态观测器是根据系统的输入输出来确定系统内部状态变量的装置,它的示意图如下:
在自抗扰控制器的设计过程中,我们通常把未知的干扰都用
f
f
f来表示,如果利用状态观测器可以将未知的干扰观测出来,就可以提前在控制器中采取补偿措施,使得控制器的设计更加简单,这也是自抗扰控制器的核心思想。
对一个线性控制系统
{
X
˙
=
A
X
+
B
U
Y
=
C
X
left{ begin{array}{lr} dot{X} = AX+BU & \ Y = CX end{array} right.
{X˙=AX+BUY=CX
来说,以对象的输出量
Y
Y
Y和输入量
U
U
U作为其输入,可以构造出如下的新系统
Z
˙
=
A
Z
−
L
(
C
Z
−
Y
)
+
B
U
=
(
A
−
L
C
)
Z
+
L
Y
+
B
U
dot{Z} = AZ-L(CZ-Y)+BU = (A-LC)Z+LY+BU
Z˙=AZ−L(CZ−Y)+BU=(A−LC)Z+LY+BU ,
L
L
L为要适当选取的矩阵,这是用对象的输出量
Y
Y
Y和输入量
U
U
U来设计出的新系统,令这两个系统状态变量的误差记为
e
=
Z
−
X
e= Z-X
e=Z−X,则上面两个方程组相减,得误差变量
e
e
e所满足的方程组为
e
˙
=
(
A
−
L
C
)
e
dot{e} = (A-LC)e
e˙=(A−LC)e,这里只要取矩阵
L
L
L使得
A
−
L
C
A-LC
A−LC稳定,就会有
e
⇒
0
eRightarrow0
e⇒0,从而
Z
⇒
X
Z Rightarrow X
Z⇒X。新设计的系统的状态
Z
Z
Z就能近似的估计出原系统的所有状态变量
X
X
X,这个状态观测器也可以写成
{
e
=
C
Z
−
Y
Z
˙
=
A
Z
−
L
e
+
B
U
left{ begin{array}{lr} e=CZ-Y & \ dot{Z} = AZ-Le+BU end{array} right.
{e=CZ−YZ˙=AZ−Le+BU
下面来看一个具体的例子
设对象为如下有扰动作用的非定常系统
{
x
1
˙
=
x
2
,
x
1
(
0
)
=
0
x
2
˙
=
f
(
x
1
,
x
2
,
t
)
+
w
(
t
)
,
x
2
(
0
)
=
0
y
=
x
1
left{ begin{array}{lr} dot{x_1} = x_2, x_1(0) = 0& \ dot{x_2} = f(x_1,x_2,t) +w(t), x_2(0) = 0 & \ y = x_1 end{array} right.
⎩⎨⎧x1˙=x2,x1(0)=0x2˙=f(x1,x2,t)+w(t),x2(0)=0y=x1
其中,
f
(
x
1
,
x
2
,
t
)
=
−
(
1
+
c
o
s
(
t
)
2
)
x
1
−
(
1
+
s
i
n
(
t
3
)
)
x
2
f(x_1,x_2,t) = -(1+frac{cos(t)}{2})x_1-(1+sin(frac{t}{3}))x_2
f(x1,x2,t)=−(1+2cos(t))x1−(1+sin(3t))x2,
w
(
t
)
=
s
i
g
n
(
s
i
n
(
3
t
2
)
)
w(t) = sign(sin(frac{3t}{2}))
w(t)=sign(sin(23t)),
取状态观测器为
{
e
=
z
1
−
y
z
1
˙
=
z
2
−
100
e
z
2
˙
=
−
200
f
a
l
(
e
,
0.5
,
0.01
)
left{ begin{array}{lr} e = z_1-y & \ dot{z_1} = z_2-100e & \ dot{z_2} = -200fal(e, 0.5, 0.01) end{array} right.
⎩⎨⎧e=z1−yz1˙=z2−100ez2˙=−200fal(e,0.5,0.01)
其中
f
a
l
(
e
,
0.5
,
0.01
)
=
{
∣
e
∣
0.5
s
i
g
n
(
e
)
,
∣
e
∣
>
0.01
e
0.0
1
0.5
,
∣
e
∣
≤
0.01
fal(e, 0.5, 0.01) = left{ begin{array}{lr} |e|^{0.5}sign(e), |e|>0.01 & \ frac{e}{0.01^{0.5}}, |e| leq 0.01 end{array} right.
fal(e,0.5,0.01)={∣e∣0.5sign(e),∣e∣>0.010.010.5e,∣e∣≤0.01
用这个观测器对对象进行状态估计时,可以用简单的欧拉积分法来计算,即令状态观测器的初始值为
z
1
(
0
)
=
0
z_1(0)=0
z1(0)=0,
z
2
(
0
)
=
0
z_2(0) = 0
z2(0)=0,然后把系统离散化成如下的递推公式来计算
{
e
=
z
1
−
y
,
f
e
=
f
a
l
(
e
,
0.5
,
0.01
)
z
1
=
z
1
+
h
(
z
2
−
100
e
)
z
2
=
z
2
−
h
200
f
e
left{ begin{array}{lr} e = z_1-y, fe = fal(e, 0.5, 0.01) & \ z_1= z_1+h(z_2-100e) & \ z_2 = z_2 -h200fe end{array} right.
⎩⎨⎧e=z1−y,fe=fal(e,0.5,0.01)z1=z1+h(z2−100e)z2=z2−h200fe
用这个递推公式,取采样周期
h
=
0.01
h=0.01
h=0.01,来进行状态估计的结果如下图所示。
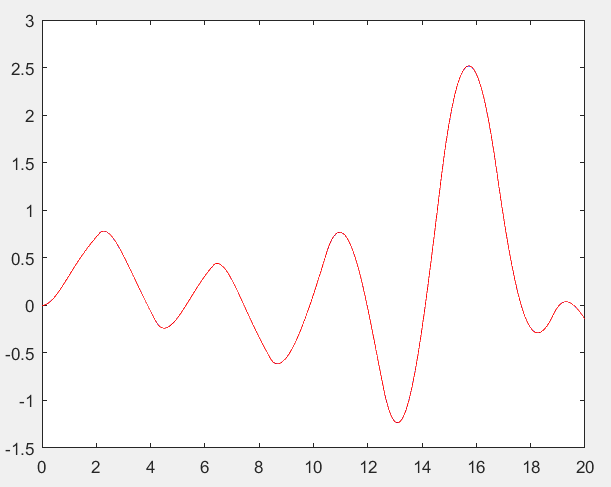
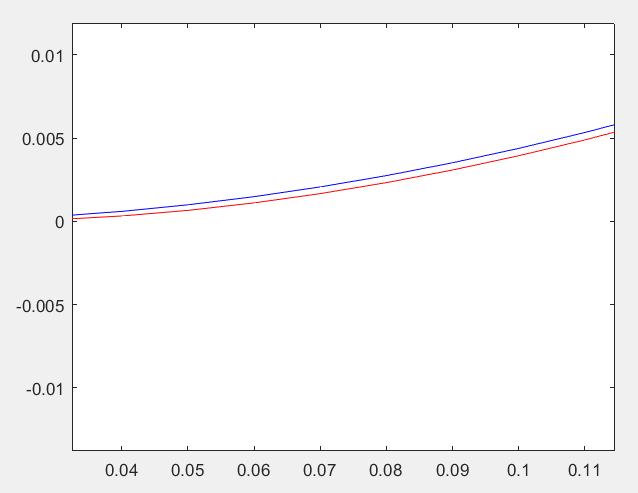
上面那张图实际上有两条曲线,是状态估计的比较好,所以两条曲线基本重合到一起了,下面有一张局部的细节图。
以下是实现的代码:
clear all;
h=0.01;
T=0.01;
time = 20;
N = time/T;
n=0:N-1;
% x = sin(n*T);
for k=1:1:N
%%% original state
x1(1) = 0;
x2(1) = 0;
x1(k+1) = x1(k) + h*x2(k);
x2(k+1) = x2(k) + h*(-(1+0.5*cos(k*T))*x1(k)-(1+sin(k*T/3))*x2(k)+sign(sin(1.5*k*T)));
y(k) = x1(k);
%%%% state observer
z1(1) = 0;
z2(1) = 0;
e(k) = z1(k) - y(k);
fe = fal(e(k), 0.5, 0.01);
z1(k+1) = z1(k) + h*(z2(k)-100*e(k));
z2(k+1) = z2(k) -h*200*fe;
end
plot(n*T,x1(1,1:2000),'b',n*T,z1(1,1:2000),'r');
fal函数如下:
function fe = fal(e,tau1,tau2)
%UNTITLED2 此处显示有关此函数的摘要
% 此处显示详细说明
if abs(e)>tau2
fe = power(abs(e),tau1)*sign(e);
else
fe = e/(power(tau2,tau1));
end
end
上面设计过程最关键的一步是状态观测器的设计,韩京清先生的设计过程考虑的参数比较多,这方面可以看一下高志强的线性ADRC的设计过程。
最后
以上就是醉熏火车最近收集整理的关于自抗扰控制器中扩张状态观测器的设计的全部内容,更多相关自抗扰控制器中扩张状态观测器内容请搜索靠谱客的其他文章。








发表评论 取消回复