目录
前言
1.非线性系统观测器设计
2. 基于LESO的滑模控制器设计
2.1设计滑模面
2.2 趋近律选择
2.3 控制律求解
3.实例仿真分析
3.1 二阶非线性系统和控制器设计
3.2 仿真分析
3.3 仿真结果
前言
上篇文章我简单介绍了二阶线性系统扩张状态观测器的设计,并且结合滑模控制理论进行数学推导和控制器设计,让我们对LESO有了一个较清晰的认识,这篇文章,我们进行非线性系统的LESO控制器设计,并且结合一篇文献进行复现分析。
上篇文章链接:
基于扩张观测器(LESO)的滑模控制_Mr. 邹的博客-CSDN博客
1.非线性系统观测器设计
考虑如下的n阶非线性系统:
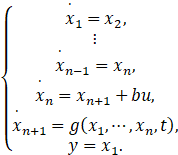
假设位置指令信号为yd,x1-yd = e1......,则有如下误差方程:
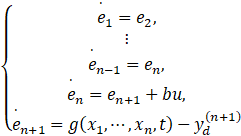
显然:
![]()
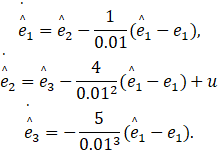
以误差变量设计如下的扩张状态观测器:
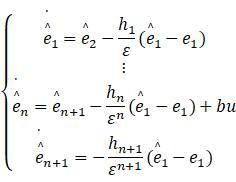
其中,ε、h1、h2...... > 0。
2. 基于LESO的滑模控制器设计
这里仍以滑模控制理论设计控制器。
2.1设计滑模面
仍设计为常见的线性滑模面:
![]()
其中,a1、a2.....滑模面系数设计要保证系统的极点为负数。
2.2 趋近律选择
仍选择方便调参的等速趋近律:
![]()
2.3 控制律求解
用等效滑模的思想,得到控制律通式:

其中U > |不确定项|。
3.实例仿真分析
3.1 二阶非线性系统和控制器设计
假设二阶非线性系统如下:
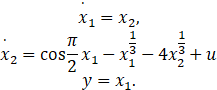
选择ε=0.01、h1=1、h2=4,则所设计的LESO为:
设计如下线性滑模面:
![]()
所以该二阶系统控制律设计为:
![]()
3.2 仿真分析
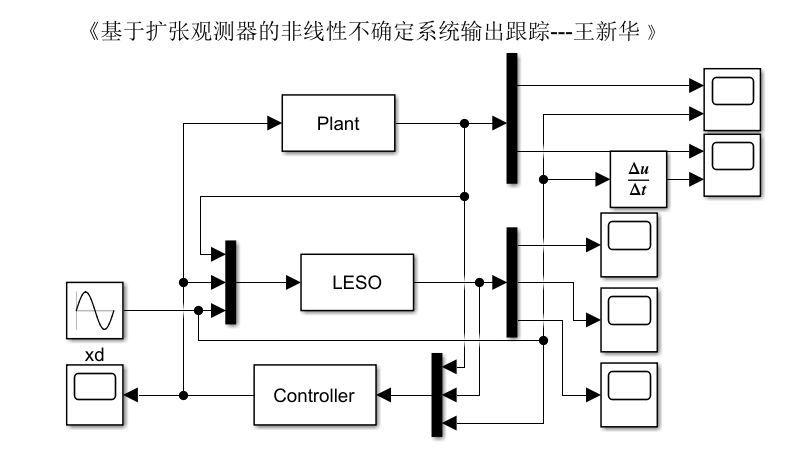
取指令位置yd = 2*sint,所建立的Simulink仿真模型如下:
3.3 仿真结果
未完待续.......
总结:
其实本质上是对观测器的控制器进行设计,间接实现了对被控对象的控制设计。
如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
参考资料:
《基于扩张观测器的非线性不确定系统输出跟踪---王新华 》
最后
以上就是等待小海豚最近收集整理的关于复现一篇简单的基于滑模控制的扩张状态观测器LESO前言1.非线性系统观测器设计2. 基于LESO的滑模控制器设计3.实例仿真分析的全部内容,更多相关复现一篇简单的基于滑模控制的扩张状态观测器LESO前言1.非线性系统观测器设计2.内容请搜索靠谱客的其他文章。








发表评论 取消回复