Simulink 仿真+S函数例子
S 函数代码如下:
function [sys,x0,str,ts,simStateCompliance] = Eg3_7_SFunction(t,x,u,flag)
switch flag
case 0 % 初始化
[sys,x0,str,ts,simStateCompliance] = mdlInitializeSizes;
case 1 % 计算模块导数
sys = mdlDerivatives(t,x,u);
case 2 % 更新模块离散状态
sys = mdlUpdate(t,x,u);
case 3 % 计算模块输出
sys = mdlOutpus(t,x,u);
case 4 % 计算下一个采样时间点
sys = mdlGetTimeOfNextVarHit(t,x,u);
case 9 % 仿真结束
sys = mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes; % 用于设置模块参数的结构体用simsizes来生成
sizes.NumContStates = 0; % 系统中的连续状态变量个数为0
sizes.NumDiscStates = 0; % 系统中的离散状态变量个数为0
sizes.NumOutputs = 1; % 系统的输出个数为1
sizes.NumInputs = 1; % 系统的输入个数为1
sizes.DirFeedthrough = 1; % 输入和输出间不存在直接比例关系
sizes.NumSampleTimes = 1; % 只有1个采样时间
sys = simsizes(sizes); % 设置完后赋给sys输出
x0 = []; % 设置状态变量的初始值
str = []; % 固定格式
ts = [0 0]; % 该取值对应纯连续函数
simStateCompliance = 'UnknownSimState';
% 计算模块导数子函数
function sys=mdlDerivatives(t,x,u)
sys = [];
% 更新模块离散状态子函数
function sys=mdlUpdate(t,x,u)
sys = [];
% 计算模块输出子函数
function sys = mdlOutpus(t,x,u)
if u >= 0 && u <= 3
sys = 0.4 * u;
else
if u >= 3 && u <= 16
sys = 0.8 * u + 1.39;
end
end
% 计算下一个采样时间点子函数
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 1;
sys = t + sampleTime;
% 仿真结束子函数
function sys=mdlTerminate(t,x,u)
sys = [];
注意,仿真程序和S函数不能使用同一个文件名。
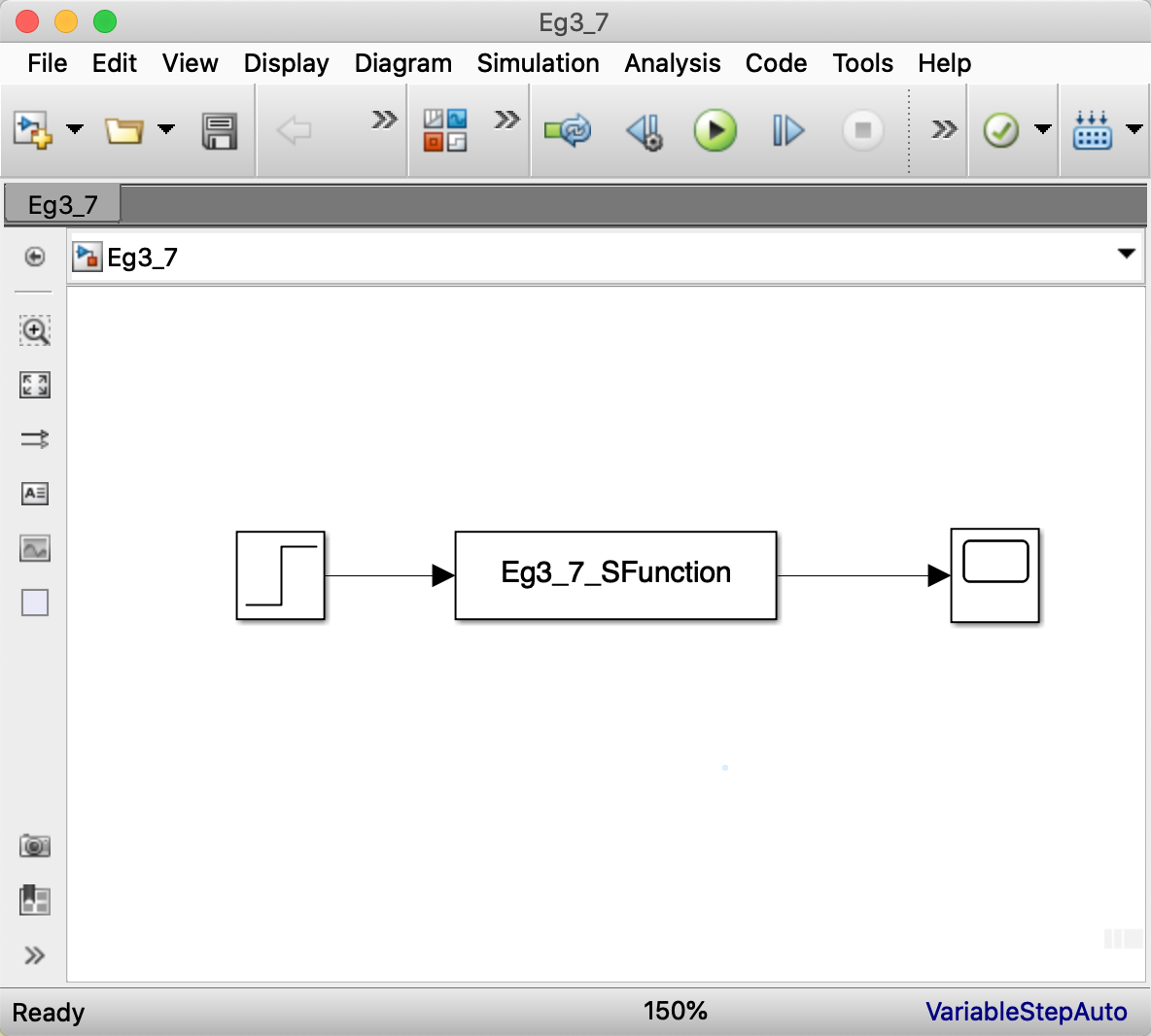
仿真器程序如下图所示:
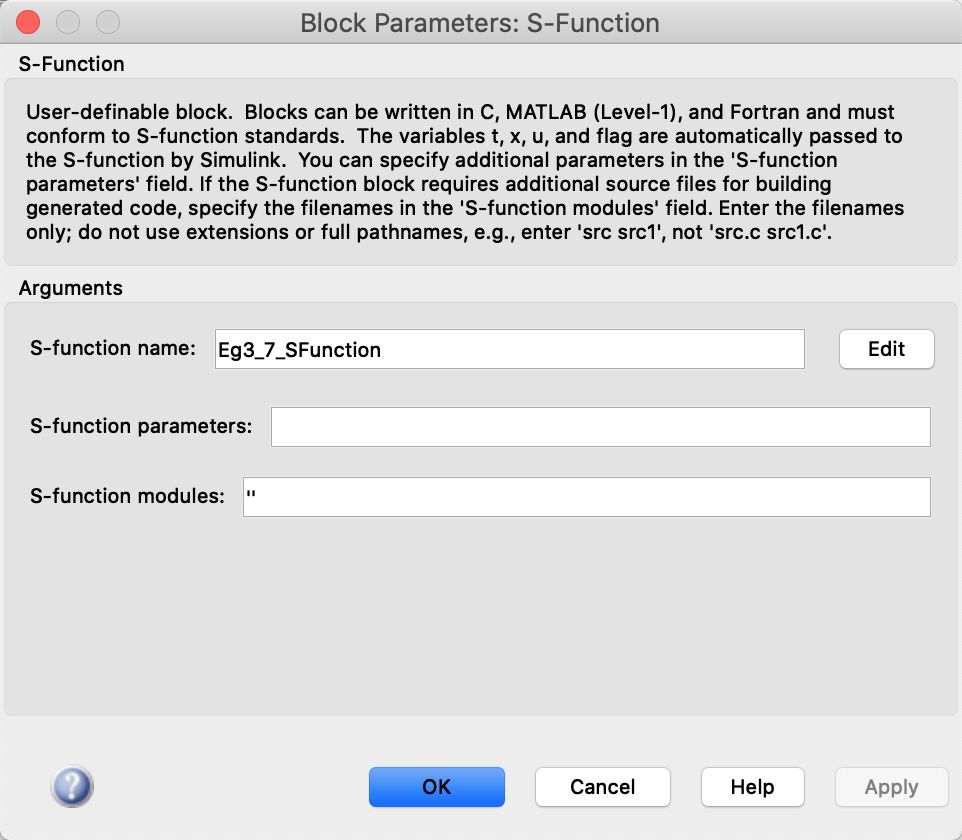
S-FunctionModel参数设置如下:
此处仅需要将S函数名字改为所编写的S函数名字即可。
详见Github
最后
以上就是要减肥可乐最近收集整理的关于【Matlab 控制】Simulink仿真+S函数例子Simulink 仿真+S函数例子的全部内容,更多相关【Matlab内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复