在熟悉了UART概念后,我们要学以致用,在Linux用起来来驱动起来蓝牙芯片!
我们直接借用man来看下,命令如下: man termios
1.头文件引用
#include <termios.h>
#include <unistd.h>2.串口打开关闭
open(“/dev/ttyUSB0”, O_RDWR|O_NOCTTY);
close(fd);Linux秉行一切皆文件的,所以打开关是用open,关闭串口使用close
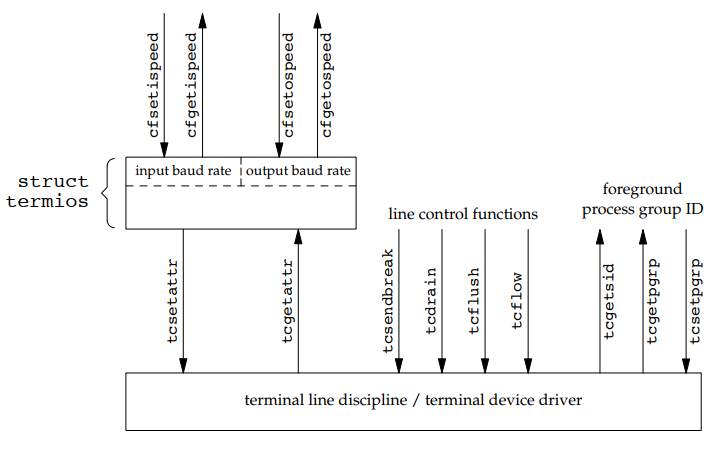
3.串口配置的重要结构体
struct termios
{
tcflag_t c_iflag; /* input flags */
tcflag_t c_oflag; /* output flags */
tcflag_t c_cflag; /* control flags */
tcflag_t c_lflag; /* local flags */
cc_t c_cc[NCCS]; /* control characters */
};下面我们来分别介绍下各个flag!
3.1 c_iflag输入模式标志,控制终端输入方式
在输入值传给程序之前控制其处理的方式
- IGNBRK 忽略BREAK键输入
- BRKINT 如果设置了IGNBRK,BREAK键的输入将被忽略,如果设置BRKINT ,将产生SIGINT中断
- IGNPAR 忽略奇偶校验错误
- PARMRK 标识奇偶校验错误
- INPCK 允许输入奇偶校验
- ISTRIP 去除字符的第8个比特
- INLCR 将输入的NL(换行)转换成CR(回车)
- IGNCR 忽略输入的回车
- ICRNL 将输入的回车转化成换行(如果IGNCR未设置的情况下)
- IUCLC 将输入的大写字符转换成小写字符(非POSIX)
- IXON 允许输入时对XON/XOFF流进行控制
- IXANY 输入任何字符将重启停止的输出
- IXOFF 允许输入时对XON/XOFF流进行控制
- IMAXBEL 当输入队列满的时候开始响铃,Linux在使用该参数而是认为该参数总是已经设置
3.2 c_oflag输出模式标志,控制终端输出方式
负责控制输出字元的处理方式
- OPOST 处理后输出
- OLCUC 将输入的小写字符转换成大写字符(非POSIX)
- ONLCR 将输入的NL(换行)转换成CR(回车)及NL(换行)
- OCRNL 将输入的CR(回车)转换成NL(换行)
- ONOCR 第一行不输出回车符
- ONLRET 不输出回车符
- OFILL 发送填充字符以延迟终端输出
- OFDEL 以ASCII码的DEL作为填充字符,如果未设置该参数,填充字符将是NUL(‘/0’)(非POSIX)
- NLDLY 换行输出延时,可以取NL0(不延迟)或NL1(延迟0.1s)
- CRDLY 回车延迟,取值范围为:CR0、CR1、CR2和 CR3
- TABDLY 水平制表符输出延迟,取值范围为:TAB0、TAB1、TAB2和TAB3
- BSDLY 空格输出延迟,可以取BS0或BS1
- VTDLY 垂直制表符输出延迟,可以取VT0或VT1
- FFDLY 换页延迟,可以取FF0或FF1
3.3 c_cflag控制模式标志,指定终端硬件控制信息
用于控制终端设备的硬件设置
- CBAUD 波特率(4+1位)(非POSIX)
- CBAUDEX 附加波特率(1位)(非POSIX)
- CSIZE 字符长度,取值范围为CS5、CS6、CS7或CS8
- CSTOPB 设置两个停止位
- CREAD 使用接收器
- PARENB 使用奇偶校验
- PARODD 对输入使用奇偶校验,对输出使用偶校验
- HUPCL 关闭设备时挂起
- CLOCAL 忽略调制解调器线路状态
- CRTSCTS 使用RTS/CTS流控制
3.4 c_lflag本地模式标志,控制终端编辑功能
主要用来控制终端设备不同的特色
- ISIG 当输入INTR、QUIT、SUSP或DSUSP时,产生相应的信号
- ICANON 使用标准输入模式,允许使用特殊字符 EOF, EOL, EOL2, ERASE, KILL, LNEXT, REPRINT, STATUS, 和 WERASE,以及按行的缓冲
- XCASE 在ICANON和XCASE同时设置的情况下,终端只使用大写。如果只设置了XCASE,则输入字符将被转换为小写字符,除非字符使用了转义字符(非POSIX,且Linux不支持该参数)
- ECHO 显示输入字符
- ECHOE 如果ICANON同时设置,ERASE将删除输入的字符,WERASE将删除输入的单词
- ECHOK 如果ICANON同时设置,KILL将删除当前行
- ECHONL 如果ICANON同时设置,即使ECHO没有设置依然显示换行符
- ECHOPRT 如果ECHO和ICANON同时设置,将删除打印出的字符(非POSIX)
- TOSTOP 向后台输出发送SIGTTOU信号
3.5 C_LINE行控制 c_cc[NCCS]控制字符
- 提供使用者设定一些特殊的功能, 如Ctrl+C的字元组合。
- 特殊控制字元主要是利用termios结构里c_cc的阵列成员来做设定。
- c_cc阵列主要用于正规与非正规两种环境,但要注意的是正规与非正规不可混为一谈。
符号下标 (初始值) 和意义(即c_cc[]数组对应下标的数值对应含义,如c_cc[VMIN] = 3):
- VINTR:(003, ETX, Ctrl-C, or also 0177, DEL, rubout) 中断字符。发出 SIGINT 信号。当设置 ISIG 时可被识别,不再作为输入传递。
- VQUIT :(034, FS, Ctrl-) 退出字符。发出 SIGQUIT 信号。当设置 ISIG 时可被识别,不再作为输入传递。
- VERASE :(0177, DEL, rubout, or 010, BS, Ctrl-H, or also #) 删除字符。删除上一个还没有删掉的字符,但不删除上一个 EOF 或行首。当设置 ICANON 时可被识别,不再作为输入传递。
- VKILL :(025, NAK, Ctrl-U, or Ctrl-X, or also @) 终止字符。删除自上一个 EOF 或行首以来的输入。当设置 ICANON 时可被识别,不再作为输入传递。
- VEOF :(004, EOT, Ctrl-D) 文件尾字符。更精确地说,这个字符使得 tty 缓冲中的内容被送到等待输入的用户程序中,而不必等到 EOL。如果它是一行的第一个字符,那么用户程序的 read() 将返回 0,指示读到了 EOF。当设置 ICANON 时可被识别,不再作为输入传递。
- VMIN :非 canonical 模式读的最小字符数(MIN主要是表示能满足read的最小字元数)。
- VEOL :(0, NUL) 附加的行尾字符。当设置 ICANON 时可被识别。
- VTIME :非 canonical 模式读时的延时,以十分之一秒为单位。
- VEOL2 :(not in POSIX; 0, NUL) 另一个行尾字符。当设置 ICANON 时可被识别。
- VSWTCH :(not in POSIX; not supported under Linux; 0, NUL) 开关字符。(只为 shl 所用。)
- VSTART :(021, DC1, Ctrl-Q) 开始字符。重新开始被 Stop 字符中止的输出。当设置 IXON 时可被识别,不再作为输入传递。
- VSTOP :(023, DC3, Ctrl-S) 停止字符。停止输出,直到键入 Start 字符。当设置 IXON 时可被识别,不再作为输入传递。
- VSUSP :(032, SUB, Ctrl-Z) 挂起字符。发送 SIGTSTP 信号。当设置 ISIG 时可被识别,不再作为输入传递。
- VDSUSP :(not in POSIX; not supported under Linux; 031, EM, Ctrl-Y) 延时挂起信号。当用户程序读到这个字符时,发送 SIGTSTP 信号。当设置 IEXTEN 和 ISIG,并且系统支持作业管理时可被识别,不再作为输入传递。
- VLNEXT :(not in POSIX; 026, SYN, Ctrl-V) 字面上的下一个。引用下一个输入字符,取消它的任何特殊含义。当设置 IEXTEN 时可被识别,不再作为输入传递。
- VWERASE :(not in POSIX; 027, ETB, Ctrl-W) 删除词。当设置 ICANON 和 IEXTEN 时可被识别,不再作为输入传递。
- VREPRINT :(not in POSIX; 022, DC2, Ctrl-R) 重新输出未读的字符。当设置 ICANON 和 IEXTEN 时可被识别,不再作为输入传递。
- VDISCARD :(not in POSIX; not supported under Linux; 017, SI, Ctrl-O) 开关:开始/结束丢弃未完成的输出。当设置 IEXTEN 时可被识别,不再作为输入传递。
- VSTATUS :(not in POSIX; not supported under Linux; status request: 024, DC4, Ctrl-T).
这些符号下标值是互不相同的,除了 VTIME,VMIN 的值可能分别与 VEOL,VEOF 相同。 (在 non-canonical 模式下,特殊字符的含义更改为延时含义MIN 表示应当被读入的最小字符数。TIME 是以十分之一秒为单位的计时器。如果同时设置了它们,read 将等待直到至少读入一个字符,一旦读入 MIN 个字符或者从上次读入字符开始经过了 TIME 时间就立即返回。如果只设置了 MIN,read 在读入 MIN 个字符之前不会返回。如果只设置了 TIME,read 将在至少读入一个字符,或者计时器超时的时候立即返回。如果都没有设置,read 将立即返回,只给出当前准备好的字符。)
MIN与TIME组合有以下四种:
- MIN = 0 , TIME =0
有READ立即回传,否则传回 0 ,不读取任何字元 - MIN = 0 , TIME >0
READ 传回读到的字元,或在十分之一秒后传回TIME,若来不及读到任何字元,则传回0 - MIN > 0 , TIME =0
READ 会等待,直到MIN字元可读 - MIN > 0 , TIME > 0
每一格字元之间计时器即会被启动,READ 会在读到MIN字元,传回值或TIME的字元计时(1/10秒)超过时将值传回
4.常用的函数
/* 属性相关 */
int tcgetattr(int fd, struct termios *termios_p);
int tcsetattr(int fd, int optional_actions,
const struct termios *termios_p);
void cfmakeraw(struct termios *termios_p);
/* 控制相关 */
int tcsendbreak(int fd, int duration);
int tcdrain(int fd);
int tcflush(int fd, int queue_selector);
int tcflow(int fd, int action);
/* 速度相关 */
speed_t cfgetispeed(const struct termios *termios_p);
speed_t cfgetospeed(const struct termios *termios_p);
int cfsetispeed(struct termios *termios_p, speed_t speed);
int cfsetospeed(struct termios *termios_p, speed_t speed);| 函数名称 | 描述 |
| tcgetattr | 获取串口属性,填充到termios_p入参中 |
| tcsetattr | 根据termios_p的值改变串口属性 optional_actions (tcsetattr函数的第二个参数)指定了什么时候改变会起作用: |
| cfmakeraw | 把串口属性设置位初始状态,比如以下值: termios_p->c_iflag &= ~(IGNBRK | BRKINT | PARMRK | ISTRIP | INLCR | IGNCR | ICRNL | IXON); termios_p->c_oflag &= ~OPOST; termios_p->c_lflag &= ~(ECHO | ECHONL | ICANON | ISIG | IEXTEN); termios_p->c_cflag &= ~(CSIZE | PARENB); termios_p->c_cflag |= CS8; |
| cfgetispeed | 获取input的串口波特率 |
| cfgetospeed | 获取output的串口波特率 |
| cfsetispeed | 设置input的串口波特率 |
| cfsetospeed | 获取output的串口波特率 |
| tcsendbreak | |
| tcdrain | 等待所有写入fd中的数据输出 |
| tcflush | 清空串口BUFFER中的数据函数 常用的有三个值, TCIFLUSH清除正收到的数据,且不会读取出来; TCOFLUSH清除正写入的数据,且不会发送至终端; TCIOFLUSH清除所有正在发生的I/O数据; |
| tcflow | 挂起 fd 引用的对象上的数据传输或接收,取决于 action 的值 TCOOFF 挂起输出 |
框图如下:
我们写一个sample,用H4 transport来发送一个HCI RESET然后读回来值:
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <signal.h>
#include <sys/time.h>
#include <sys/types.h>
#include <string.h>
#include <stdint.h>
#include <stdio.h>
#define UART_MAX_SIZE 256
int uart_fd;
uint8_t uart_buffer[UART_MAX_SIZE] = {0};
void usage()
{
printf("---------------------------------n");
printf(" ./uart_test port_name n");
printf("example: ./uart_test /dev/ttyUSB0n");
printf("---------------------------------n");
}
#define MAX_COL 16
#define SHOW_LINE_SIZE 16
void bt_hex_dump(uint8_t *data,uint32_t len)
{
uint32_t line;
uint32_t curline = 0;
uint32_t curcol = 0;
char showline[SHOW_LINE_SIZE];
uint32_t data_pos = 0;
if(len % MAX_COL)
{
line = len/MAX_COL+1;
}
else
{
line = len/MAX_COL;
}
for(curline = 0; curline < line; curline++)
{
sprintf(showline,"%08xh:",curline*MAX_COL);
printf("%s",showline);
for(curcol = 0; curcol < MAX_COL; curcol++)
{
if(data_pos < len)
{
printf("%02x ",data[data_pos]);
data_pos++;
continue;
}
else
{
break;
}
}
printf("n");
}
}
void alarm_send_command()
{
uint8_t hci_reset[] = {0x01,0x03,0x0c,0x00};
printf("send HCI commandn");
write(uart_fd,hci_reset,sizeof(hci_reset));
alarm(1);
}
int main(int argc, char *argv[])
{
struct termios toptions;
usage();
if(argc != 2)
{
printf("Usage errorn");
return 0;
}
uart_fd = open(argv[1], O_RDWR | O_NOCTTY);
printf("uart_fd %dn",uart_fd);
if (tcgetattr(uart_fd, &toptions) < 0)
{
printf("ERROR:Couldn't get term attributesn");
return -1;
}
cfmakeraw(&toptions);
// 8N1
toptions.c_cflag &= ~CSTOPB;
toptions.c_cflag |= CS8;
toptions.c_cflag |= CREAD | CLOCAL | CRTSCTS;
toptions.c_iflag &= ~(IXON | IXOFF | IXANY);
toptions.c_cflag &= ~PARENB;
toptions.c_cc[VMIN] = 1;
toptions.c_cc[VTIME] = 0;
if(tcsetattr(uart_fd, TCSANOW, &toptions) < 0)
{
printf("ERROR:Couldn't set term attributesn");
return -1;
}
if (tcgetattr(uart_fd, &toptions) < 0)
{
printf("ERROR:Couldn't get term attributesn");
return -1;
}
cfsetospeed(&toptions, B115200);
cfsetispeed(&toptions, B115200);
if( tcsetattr(uart_fd, TCSANOW, &toptions) < 0)
{
printf("ERROR:Couldn't set term attributesn");
return -1;
}
signal(SIGALRM, alarm_send_command);
alarm(1);
while(1)
{
int read_result = read(uart_fd,uart_buffer,UART_MAX_SIZE);
bt_hex_dump(uart_buffer,read_result);
memset(uart_buffer,0,UART_MAX_SIZE);
}
}整个程序实现的效果很简单,就是打开串口(8N1+流控),设置波特率,然后1s发送一次hci reset,然后读取数据uart数据
最后
以上就是喜悦大树最近收集整理的关于Linux UART编程 驱动蓝牙芯片1.头文件引用2.串口打开关闭3.串口配置的重要结构体4.常用的函数的全部内容,更多相关Linux内容请搜索靠谱客的其他文章。








发表评论 取消回复