本文介绍功率因数校正(PFC)的simulink仿真实现,并用PID控制器将功率因数调整为近似1。最后将控制器离散化,用C语言的形式编写代码实现PID控制simulink中的模型实现同样的效果。(仅作为学习参考作用,若有不足请指出讨论。)
单相功率因数校正PFC电路的simulink仿真(从电路图搭建到C语言实现PID控制)
- 一、功率因数校正(PFC)电路原理
- 1.PFC含义
- 2.PFC电路原理
- 3.闭环控制设计原理
- 4.电压外环的任务
- 5.电流内环的任务
- 二、Simulink仿真电路搭建
- 1.给定元器件参数
- 2.Boost电路搭建
- 3.PID控制电路搭建(搭建simulink自带PID控制器)
- 4.测量电路搭建
- 5.电路汇总
- 三、仿真电路分析
- 1.直流输出电压波形及平均值
- 2.直流输出电压的FFT分析
- 3.整流器输出电压与电感电流波形
- 4.电网电压和电网电流的波形图
- 5.电流畸变系数、功率因数计算
- 四、C语言编写PID控制器
- 1.搭建simulink中C语言的编译环境
- 2.电路连接图
- 3.C语言编写的PID控制代码
- 4.控制器分析
- 五、仿真文件获取
- 1.积分获取
- 2.免费获取
- 六、其余电力电子电路
一、功率因数校正(PFC)电路原理
1.PFC含义
功率因数校正(Power Factor Correction,PFC)电路,是指在传统的不控整流中融入有源器件,使得交流侧电流在一定程度上正弦化,从而减小装置的非线性、改善功率因数的一种高频整流电路。
基本的单相PFC电路在单相桥式不可控整流器和负载电阻之间增加一个DC-DC功率变换电路,通常采用Boost电路(Boost电路原理及simulink仿真可以参考这个链接)。通过适当的控制Boost电路中开关管的通断,将整流器的输入电流校正成为与电网电压同相位的正弦波,消除谐波和无功电流,将电网功率因数提高到近似为1。电路的原理图如图所示:
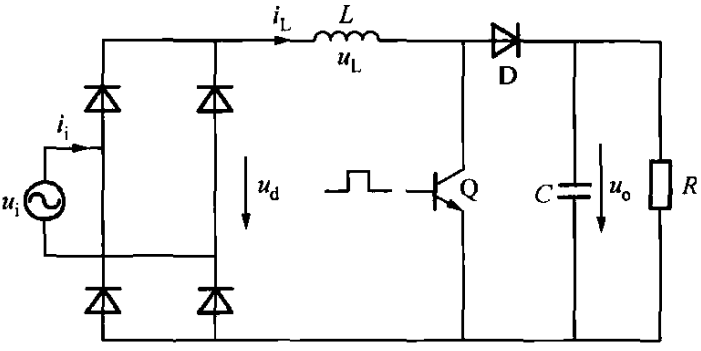
2.PFC电路原理
假定开关频率足够高,保证电感
L
L
L的电流连续;输出电容
C
C
C足够大,输出电压
u
o
u_o
uo可认为是恒定直流电压。电网电压
u
i
u_i
ui为理想正弦,即
u
i
=
U
m
∗
s
i
n
(
w
t
)
u_i=U_m*sin(wt)
ui=Um∗sin(wt),则不可控整流桥的输出电压
u
d
u_d
ud为正弦半波,
u
d
=
∣
u
i
∣
=
U
m
∗
∣
s
i
n
(
w
t
)
∣
u_d=|u_i|=U_m*|sin(wt)|
ud=∣ui∣=Um∗∣sin(wt)∣。
当开关管
Q
Q
Q导通时,对电感
L
L
L充电,电感电流
i
L
i_L
iL增加,电容
C
C
C向负载放点;当
Q
Q
Q关断,二极管
D
i
o
d
e
Diode
Diode导通时,电感两端电压
u
L
u_L
uL反向,
u
d
u_d
ud和
u
L
u_L
uL对电容充电,电感电流
i
L
i_L
iL减小。电感电流满足:

通过控制 Q Q Q的通断,即调节占空比 D D D,可以控制电感电流 i L i_L iL。若能控制 i L i_L iL近似为正弦半波电流,且与 u d u_d ud同相位,则整流桥交流侧电流也近似为正弦电流,且与电网电压 u i u_i ui同相位,即可达到功率因数校正的目的。为此,需要引入闭环控制。
3.闭环控制设计原理
控制器必须满足以下两个要求:
①实现输出直流电压
u
o
u_o
uo的调节,使其达到给定值;
②保证电网侧电流正弦化,且功率因数为1.
即在稳定输出电压
u
o
u_o
uo的情况下,使电感电流
i
L
i_L
iL与
u
d
u_d
ud波形相同。采用电压外环、电流内环的单相PFC双闭环控制的原理图如下所示:
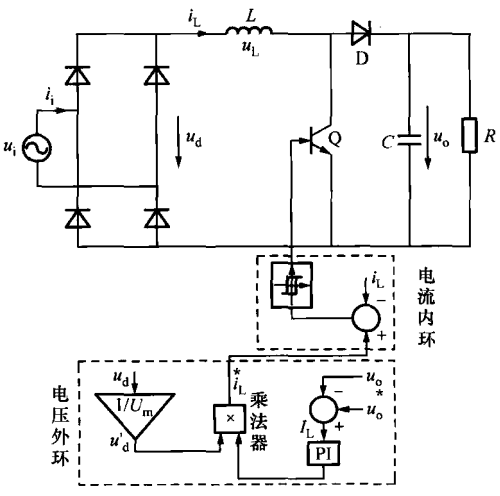
4.电压外环的任务
电压外环的任务是得到可以实现控制目标的电感电流指令值 i L ∗ i^{*}_L iL∗。给定输出电压 u o ∗ u^{*}_o uo∗减去测量到的实际输出电压 u o u_o uo的差值,经过PI调节器后输出电感电流 I L ∗ I^{*}_L IL∗的指令。测量到的整流桥出口电压 u d u_d ud除以其幅值 U m U_m Um后,可以得到 u d u_d ud表示波形的量 u d ’ u^’_d ud’, u d ’ u^’_d ud’为幅值为1的正弦半波,相位与 u d u_d ud相同。 I L ∗ I^{*}_L IL∗与 u d ’ u^’_d ud’相乘,便可以得到电感电流的指令值 i L ∗ i^{*}_L iL∗。 i L ∗ i^{*}_L iL∗为与 u d u_d ud同相位的正弦半波电流,其幅值可控制直流电压 u o u_o uo的大小。
5.电流内环的任务
电流内环的任务是通过控制开关管 Q Q Q的通断,使实际的电感电流 i L i_L iL跟踪其指令值 i L ∗ i^{*}_L iL∗。此处采用滞环电流控制法。根据电流的公式,当 Q Q Q导通时电感电流增大,而当 Q Q Q关断时,电感电流减小。令 i L ∗ i^{*}_L iL∗减去 i L i_L iL,若差值△ i L i_L iL大于规定的上限△ i L m a x i_{L_{max}} iLmax,则令 Q Q Q导通,以增大 i L i_L iL;若差值△ i L i_L iL小于规定的下限△ i L m i n i_{L_{min}} iLmin,则令 Q Q Q关断,以减小 i L i_L iL。通过滞环控制,可以保证实际的电感电流 i L i_L iL在其指令值 i L ∗ i^{*}_L iL∗附近波动,波动的大小与滞环宽度有关,即与设定的△ i L m a x i_{L_{max}} iLmax和△ i L m i n i_{L_{min}} iLmin相关。
二、Simulink仿真电路搭建
1.给定元器件参数
① 输入电压有效值为220V,频率为50Hz;
② 输出直流电压指令u*o为400V;
③ 电感L=6mH;电容C=320uF;负载电阻R=160Ω;
④ 二极管整流桥:Rs=1e5Ω,Cs=1e-6F,Ron=1e-3Ω,Lon=0,Vf=0;
⑤ 开关管Q采用MOSFET,Ron=0.001Ω,Lon=0,Vf=0.8V,Ic=0,Rs=1e5Ω,Cs=inf;
⑥ Boost电路中二极管参数:Ron=0.001Ω,Lon=0,Vf=0.8V,Ic=0,Rs=500Ω,Cs=250e-9F。
⑦ Relay滞环电流控制模块宽度设置为[-0.5,0.5],Switch on point为1,Switch off point为-1;
⑧ 仿真算法:ode23tb
2.Boost电路搭建
Boost电路的搭建可以参考这篇文章。搭建好的电路图如下:
3.PID控制电路搭建(搭建simulink自带PID控制器)
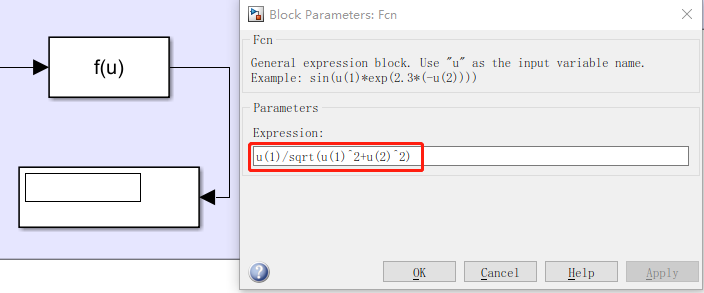
4.测量电路搭建
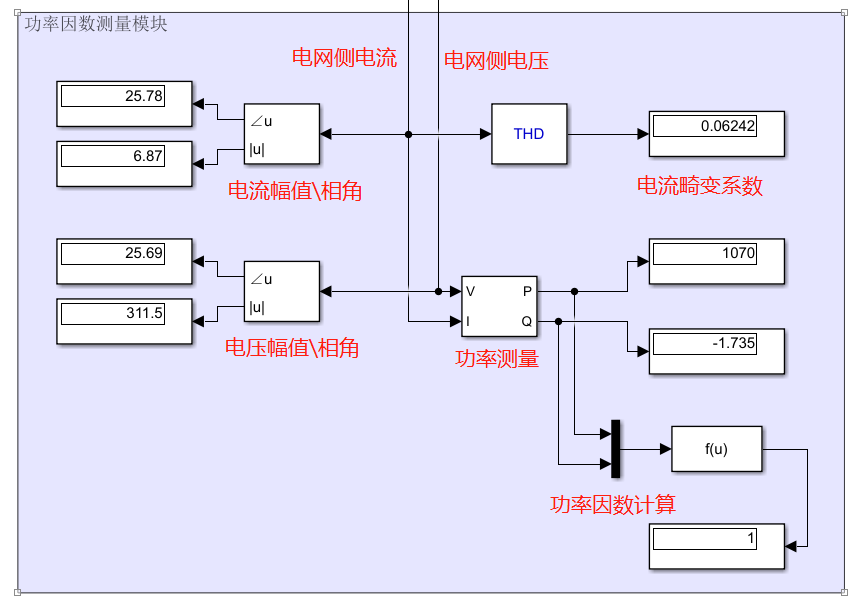
其中,功率因数计算函数如下:
5.电路汇总
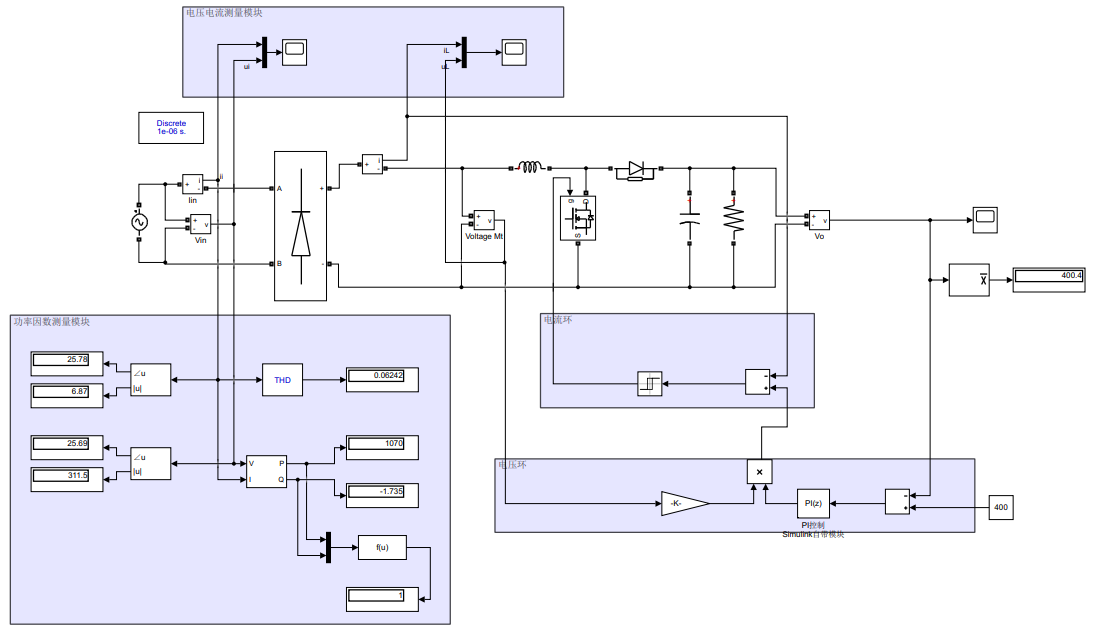
三、仿真电路分析
将powergui设置为离散模型,Ts=1e-6,PID控制器的P为0.02,I为10。
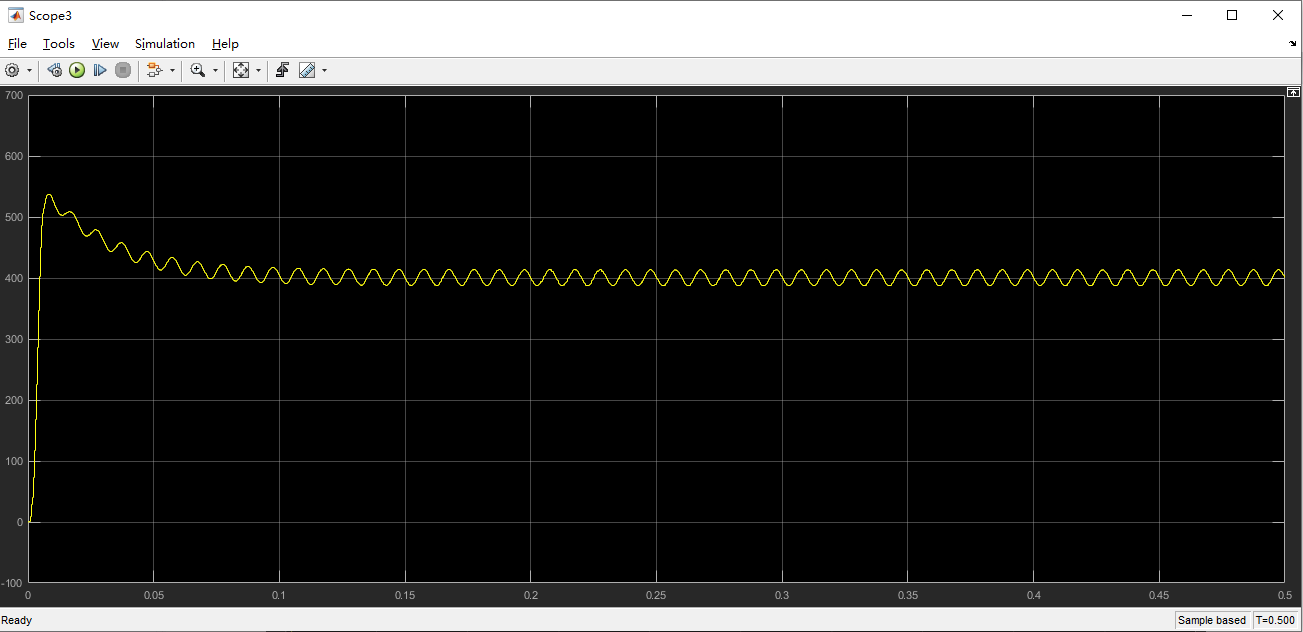
1.直流输出电压波形及平均值
输出电压波形如下:
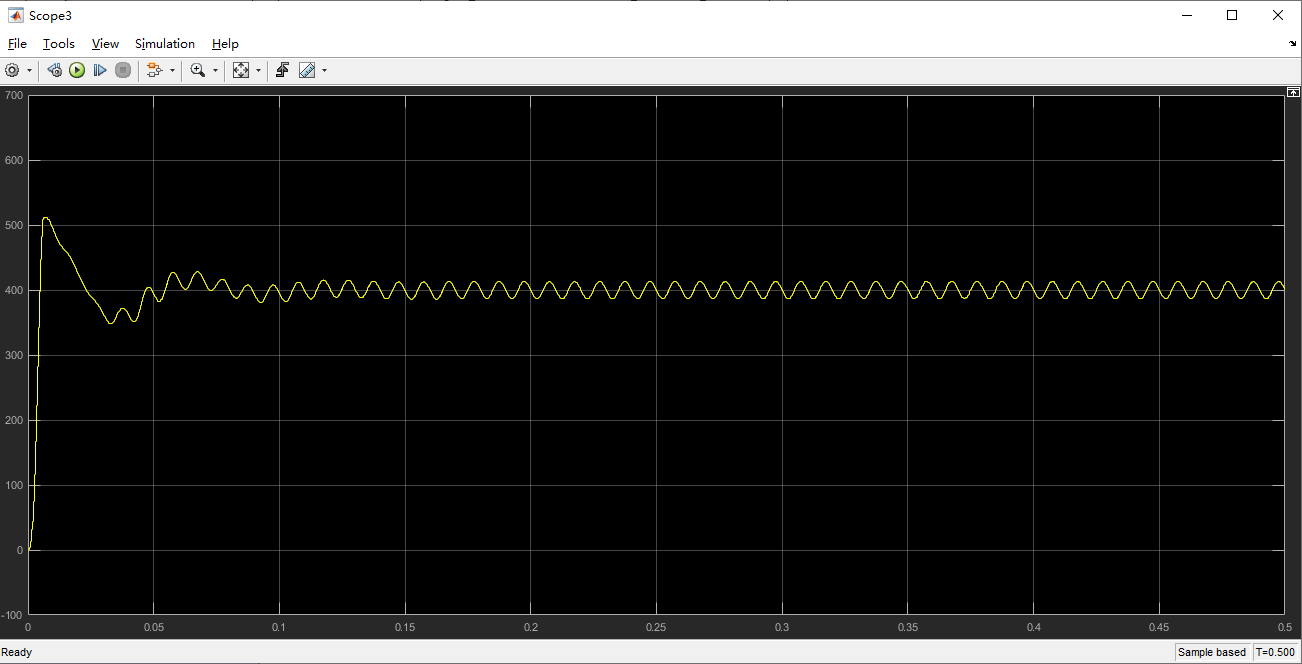
输出电压平均值如下:
可以发现,直流电压波动周期为0.01s,频率为工频(50Hz)的两倍。
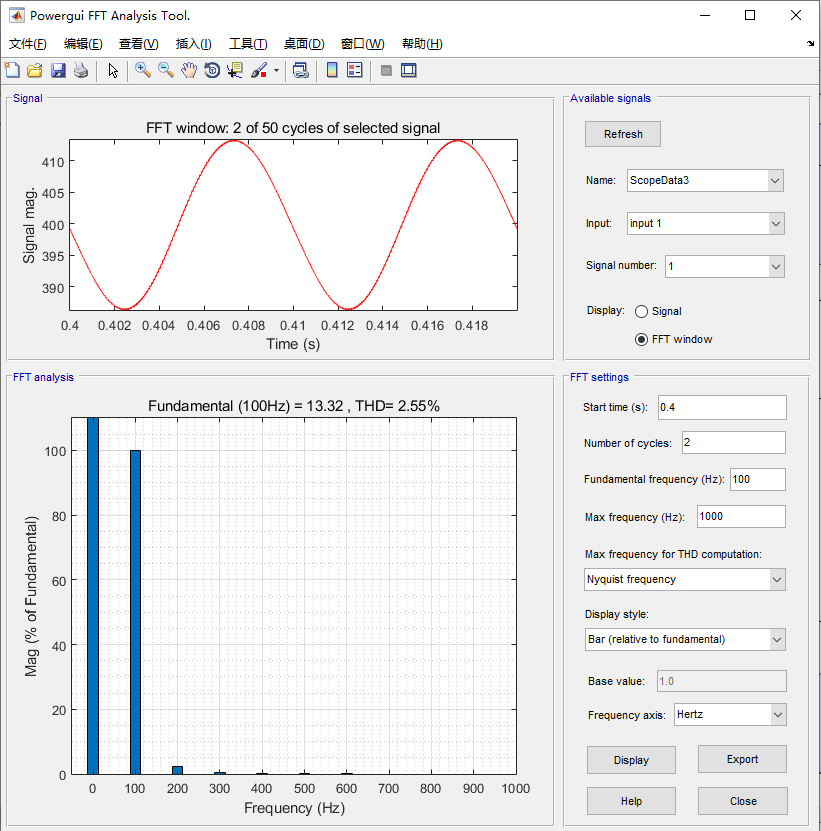
2.直流输出电压的FFT分析
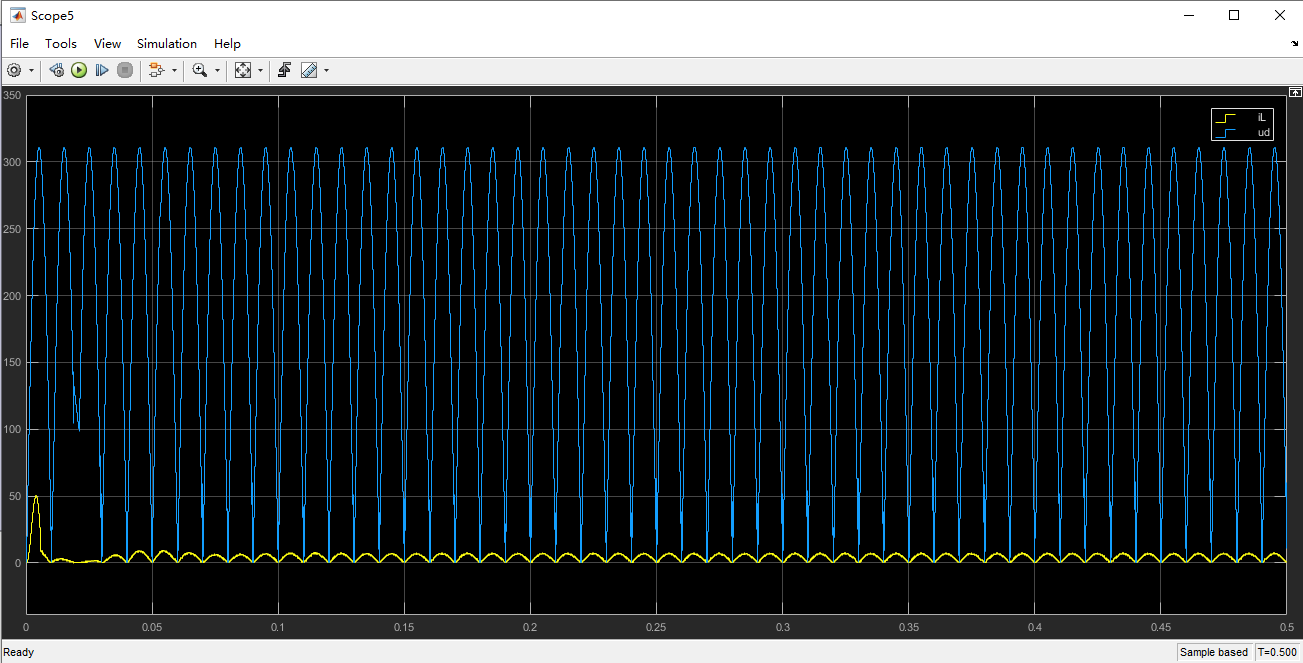
3.整流器输出电压与电感电流波形
4.电网电压和电网电流的波形图
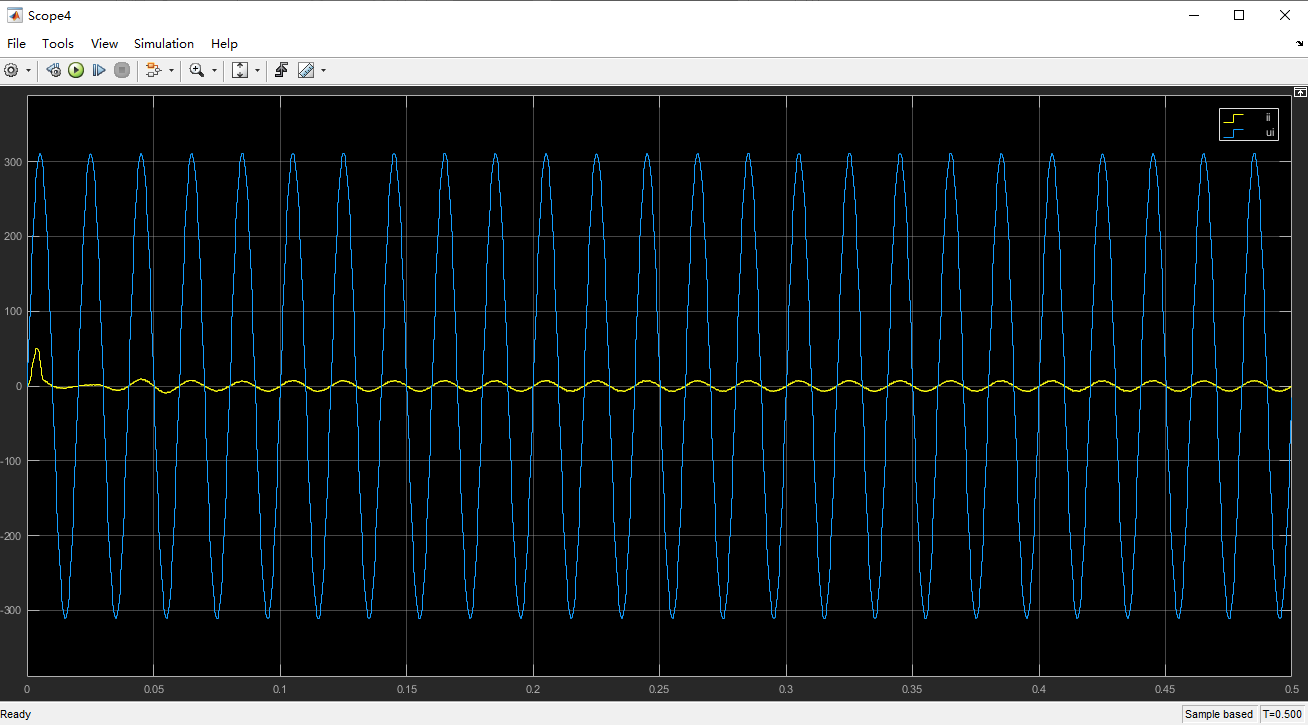
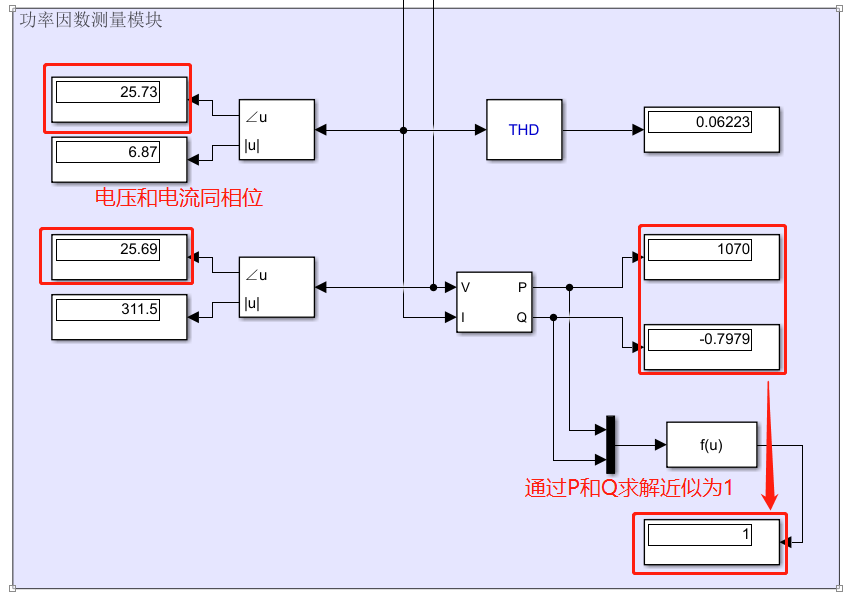
5.电流畸变系数、功率因数计算
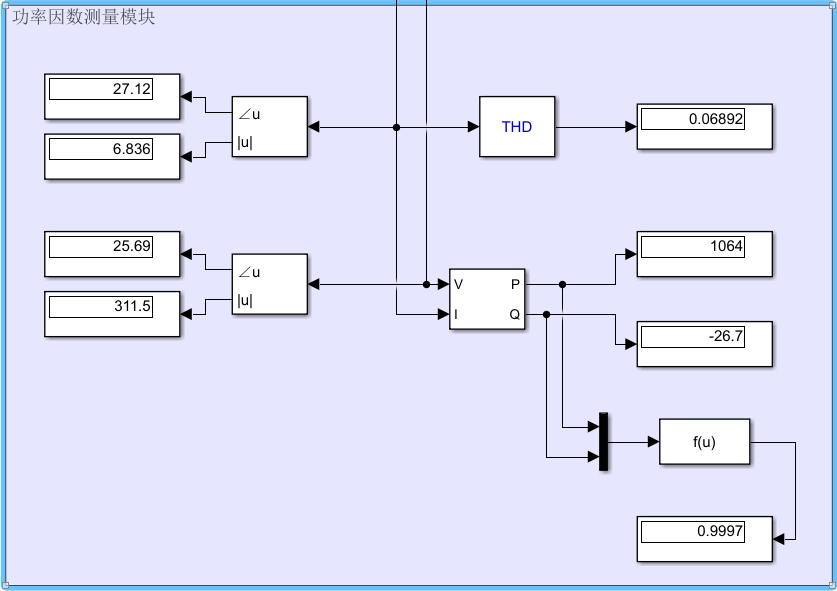
可以看出,电压和电流是同相位的,即功率因数基本为1(0.9997)。也可以观察Fourier模块的相角观察到电流与电压是同相位的,这满足控制器实现电网侧电流正弦化,且功率因数为1的要求,达到了PFC的目的。
四、C语言编写PID控制器
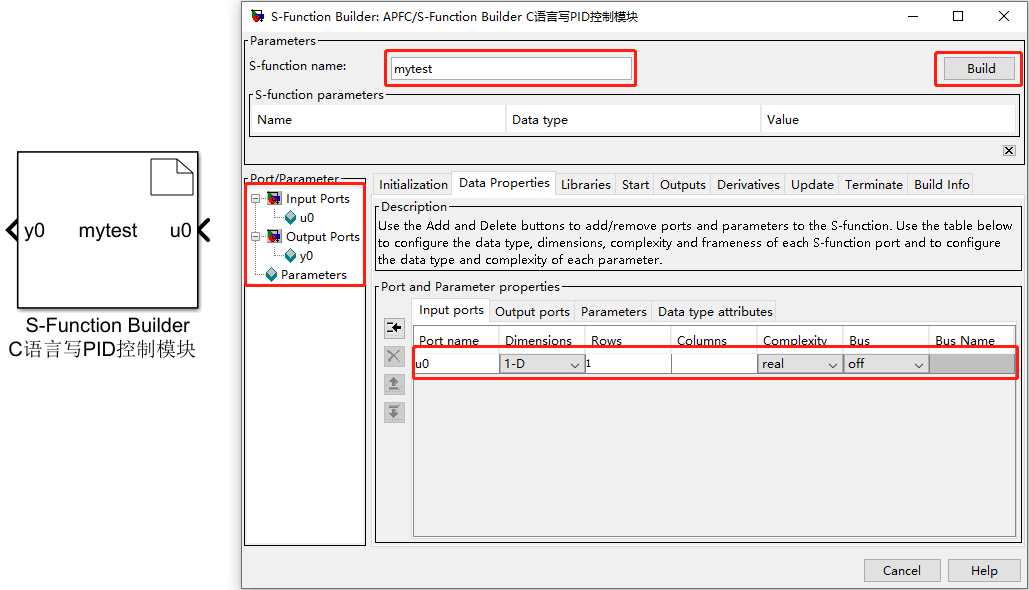
1.搭建simulink中C语言的编译环境
拖出s-function-builder模块。(需要去了解一下如何在simulink中搭建C语言的编译环境,本文是装好了进行应用。可以参考:链接1、链接2、链接3)
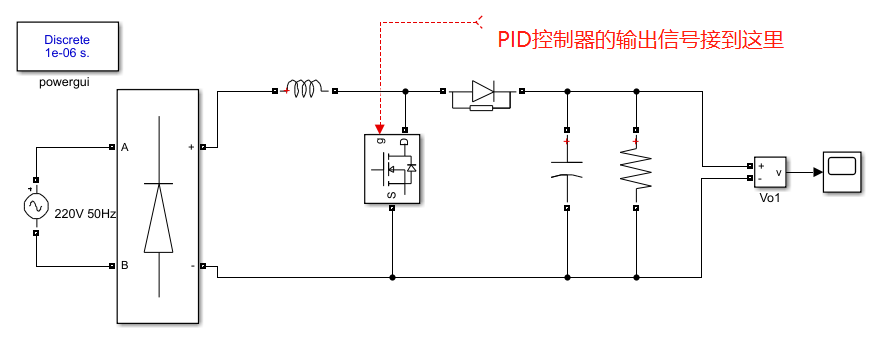
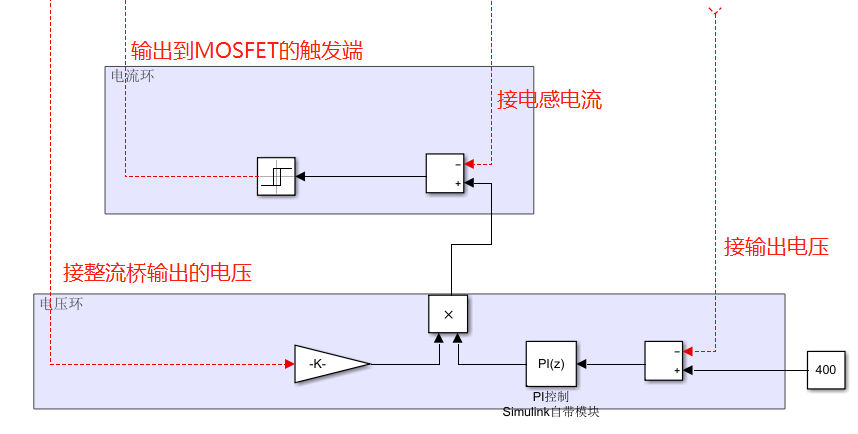
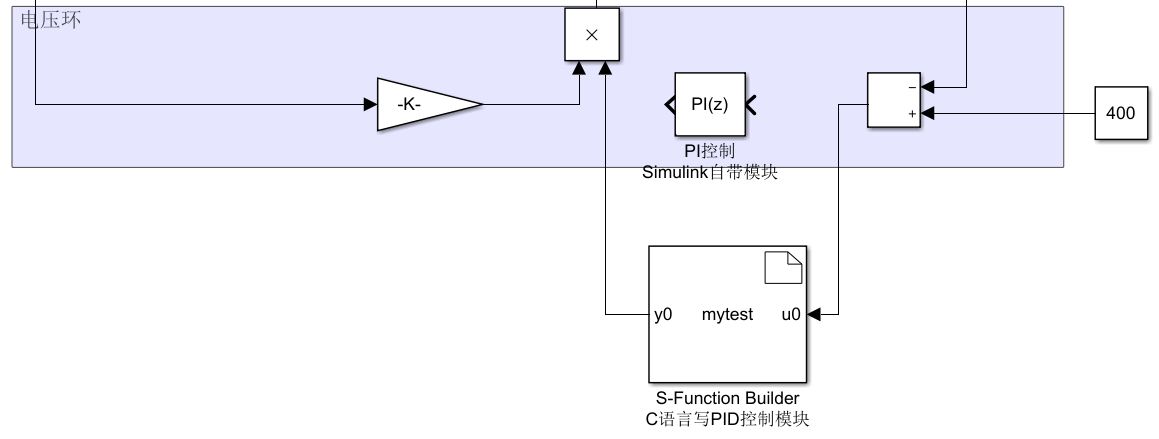
2.电路连接图
3.C语言编写的PID控制代码
/*
* Include Files
*
*/
#if defined(MATLAB_MEX_FILE)
#include "tmwtypes.h"
#include "simstruc_types.h"
#else
#include "rtwtypes.h"
#endif
/* %%%-SFUNWIZ_wrapper_includes_Changes_BEGIN --- EDIT HERE TO _END */
#include <math.h>
/* %%%-SFUNWIZ_wrapper_includes_Changes_END --- EDIT HERE TO _BEGIN */
#define u_width 1
#define y_width 1
struct _pid{
float SetSpeed;//定义设定值
float ActualSpeed;//定义实际值
float err;//定义偏差值
float err_last;//定义最上前的偏差值
float err_next;//定义上一个偏差值
float Kp,Ki,Kd;//定义比例、积分、微分系数
};
static struct _pid pid={
0,0,0,0,0,0.02,0.01,1.15
};
float PID_realize(float Err)
{
//pid.SetSpeed=speed;//设定值
pid.err=Err;//pid.SetSpeed-pid.ActualSpeed;//误差项
float incrementSpeed=
pid.Kp*(pid.err-pid.err_next)+
pid.Ki*pid.err;
//pid.Kd*(pid.err-2*pid.err_next+pid.err_last) ;//这里不用微分环节
pid.ActualSpeed+=incrementSpeed;
pid.err_last=pid.err_next;
pid.err_next=pid.err;
return pid.ActualSpeed;
}
//u0是输入的误差项,y0是控制器的输出
void mytest_Outputs_wrapper(const real_T *u0,
real_T *y0)
{
y0[0] =PID_realize(u0[0]);
}
4.控制器分析
①比例环节
可以发现仅有比例环节的情况下系统存在稳态误差,需要增加积分环节消除稳态误差。
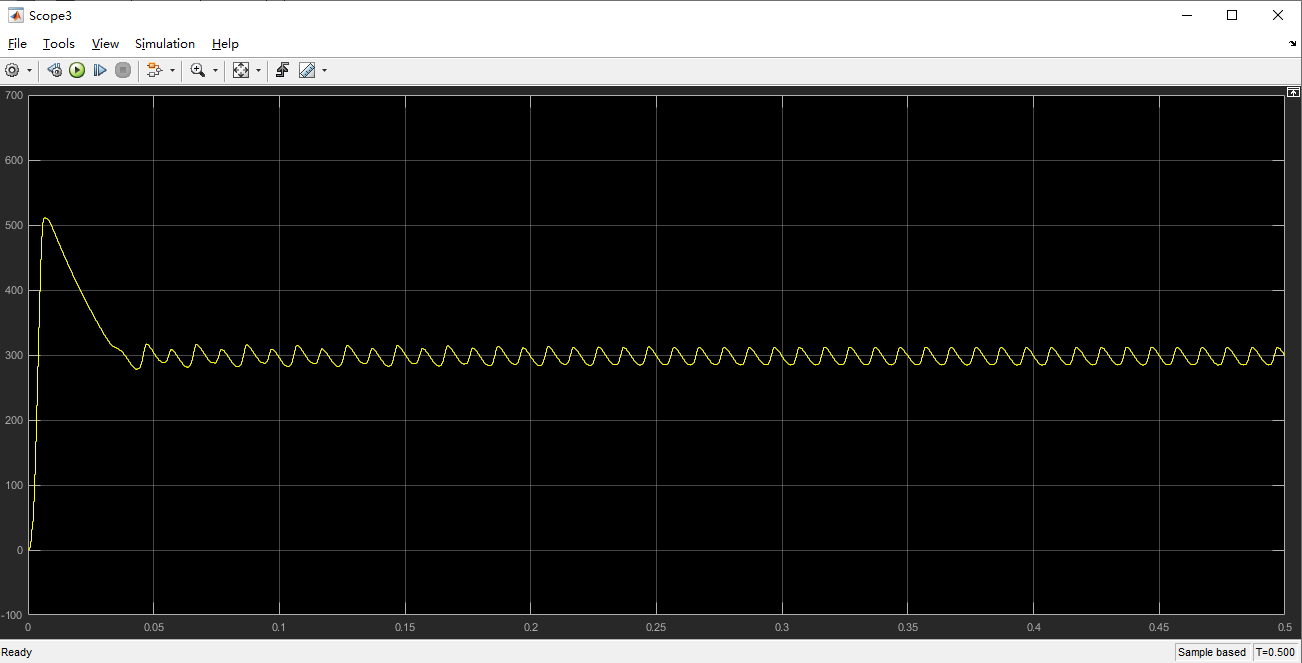
②比例积分环节
引入比例积分环节后,系统的稳态误差消失,输出为给定的400V电压。电网电流和电压同相位,功率因数由和计算得近似为1。以上是C语言实现PID控制器的效果,具体的PID参数可自行设置。
五、仿真文件获取
1.积分获取
Matlab2017b仿真文件地址
2.免费获取

六、其余电力电子电路
其余电路参考
最后
以上就是甜甜皮皮虾最近收集整理的关于单相功率因数校正PFC电路的simulink仿真(从电路图搭建到C语言实现PID控制),直接拿来做课设啦!一、功率因数校正(PFC)电路原理二、Simulink仿真电路搭建三、仿真电路分析四、C语言编写PID控制器五、仿真文件获取六、其余电力电子电路的全部内容,更多相关单相功率因数校正PFC电路内容请搜索靠谱客的其他文章。








发表评论 取消回复