原链接: https://community.bwbot.org/topic/641
开发测试平台:小强机器人
1.驱动测试
连接好RealSense摄像头后,运行下述命令可以测试sdk有没有安装成功
#sdk的安装教程 https://github.com/IntelRealSense/librealsense/blob/master/doc/distribution_linux.md#installing-the-packages
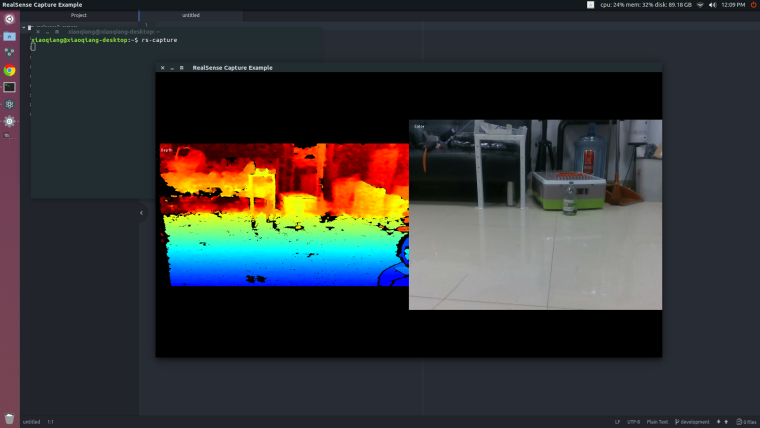
rs-capture
正常的话可以看到类似下图的图像
关闭上述命令,继续测试ros驱动
#ros驱动的安装教程 https://github.com/intel-ros/realsense
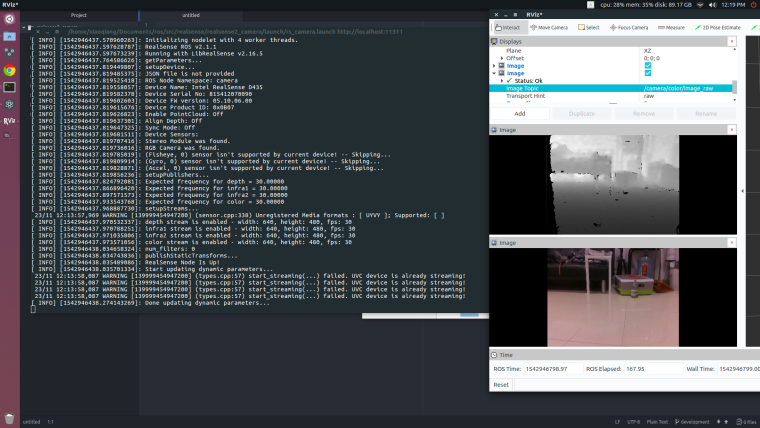
roslaunch realsense2_camera rs_camera.launch
如果正常,在rviz里面可以订阅显示深度和color图像话题。
2.关闭步骤1中命令,开始自主移动避障测试
intel RealsSense和kinect是兼容的,使用它来自主移动避障的教程也和kinect一样,区别是教程2.b、2.c步骤需要选择realsense。
roslaunch realsense2_camera rs_camera_xiaoqiang.launch
kinect避障教程:
https://community.bwbot.org/topic/115/小强ros机器人教程-10-___使用kinect进行自主移动避障
最后
以上就是着急过客最近收集整理的关于小强ROS机器人教程(28)___使用Intel RealSense D400系列深度摄像头进行自主移动避障的全部内容,更多相关小强ROS机器人教程(28)___使用Intel内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复