ROS分布式多机通信(主从机配置)
以两台计算机为例,记录分布式多机通信的配置步骤:
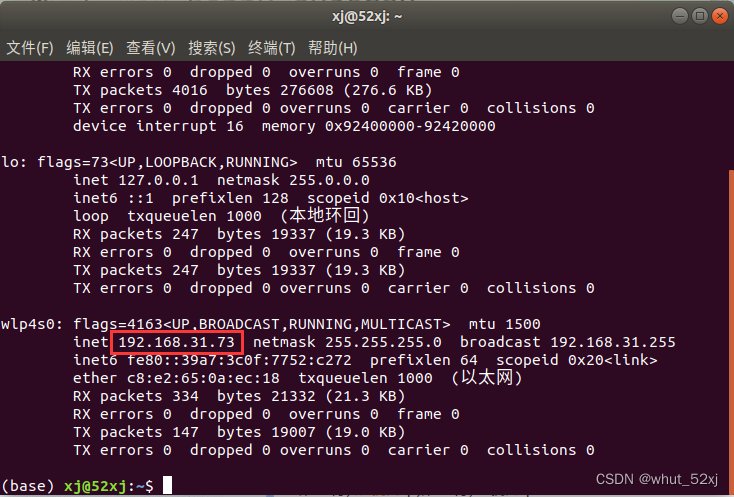
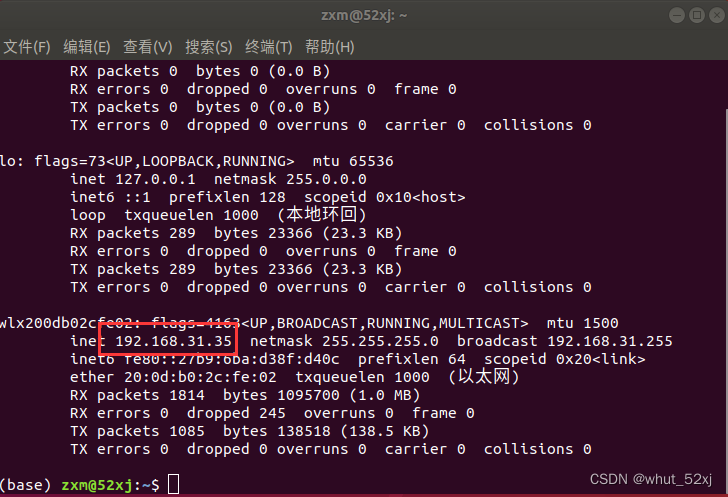
1.1在主机和从机上查询自己的ip地址(注意! 一定要在同一个网段下!)
ifconfig
主机ip
从机ip
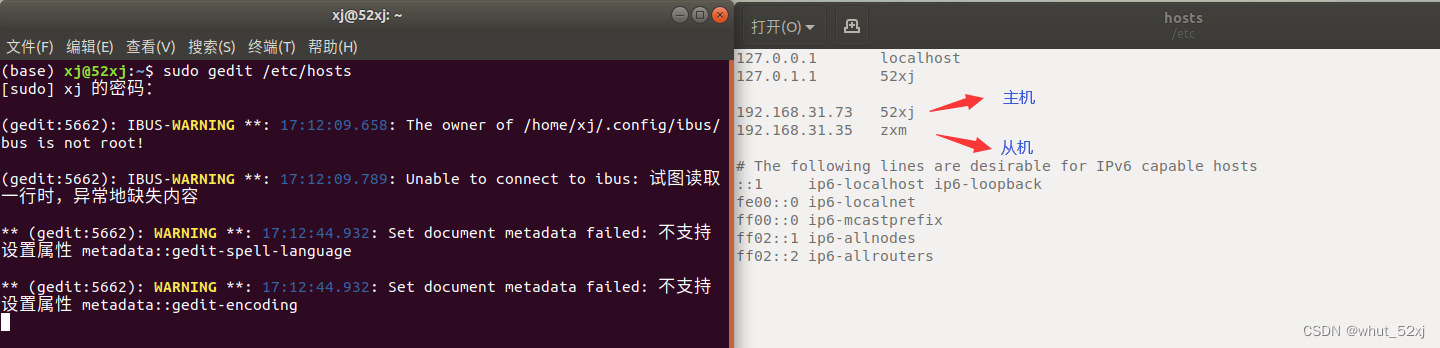
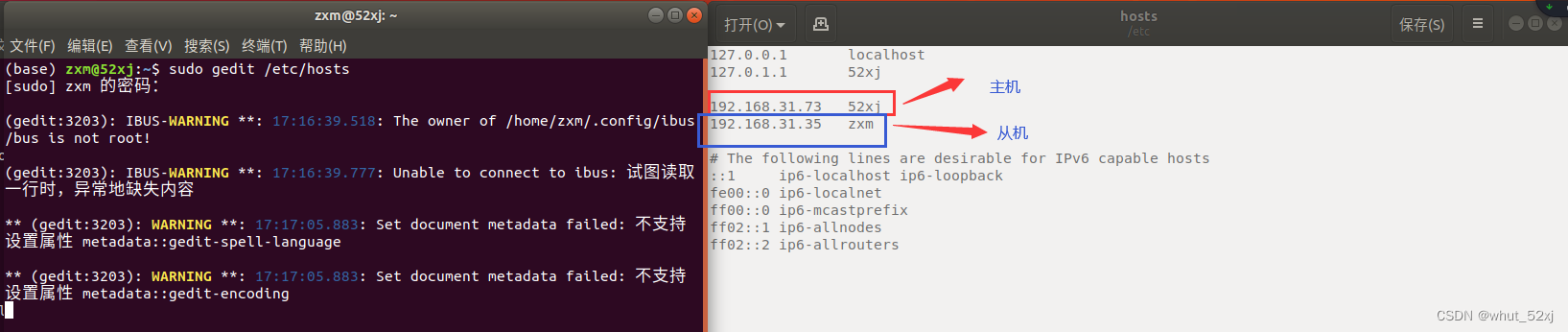
1.2 在主机和从机上分别添加两行内容
在终端输入
sudo gedit /etc/hosts
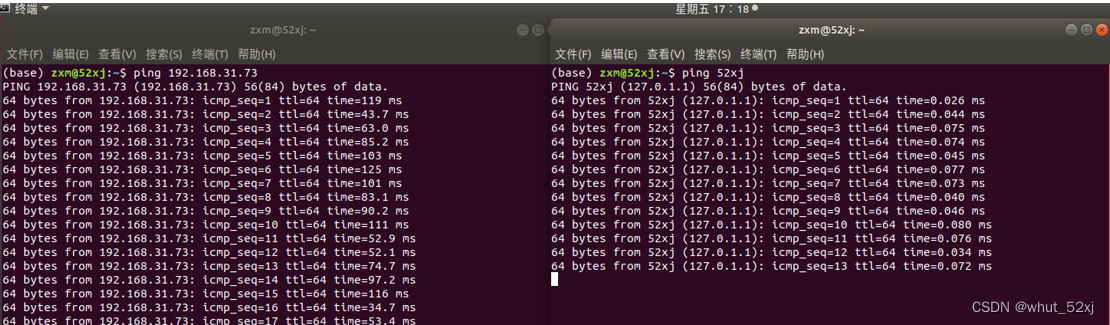
1.3 测试能够通信成功
在主机上输入 ping 从机的ip或者hostname

在从机上输入 ping 从机的ip或者hostname
1.4.实现主从机在ros上的通讯
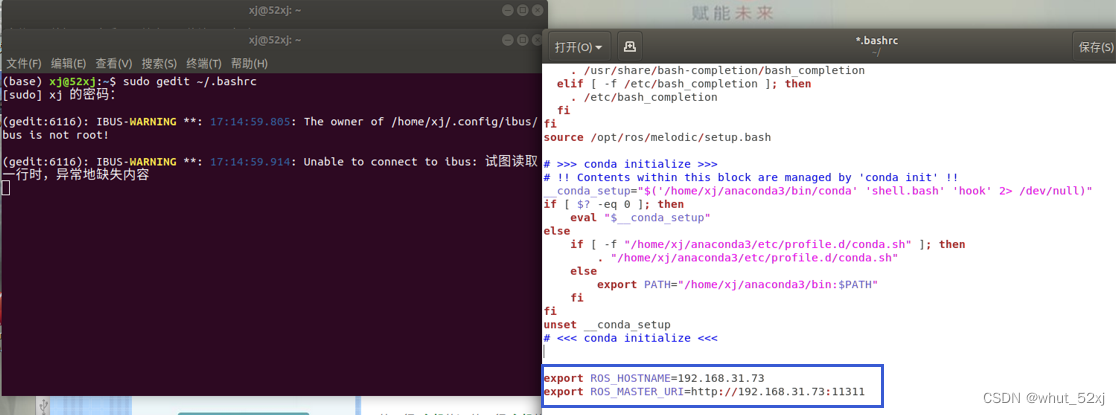
在主机的~/.bashrc 文件末尾增加两行
第一行, 主机的ip,第二行,主机的ip
export ROS_HOSTNAME=192 .168.31.73
export RoS_MASTER_URI=http: //192.168.31.73:11311
在从机的~/.bashrc 文件末尾增加两行
第一行, 从机的ip,第二行,主机的ip
export RoS_HOSTNAME=1192.168.31.35
export RoS_MASTER_URI=http://192.168.31.73:11311
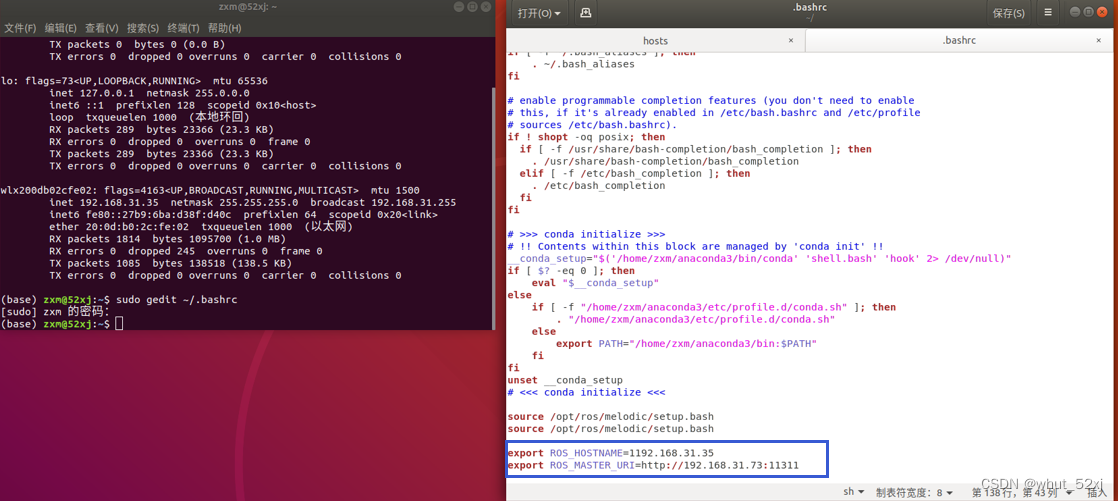
1.5 对主机和从机分别更新一下环境
source ~/.bashrc
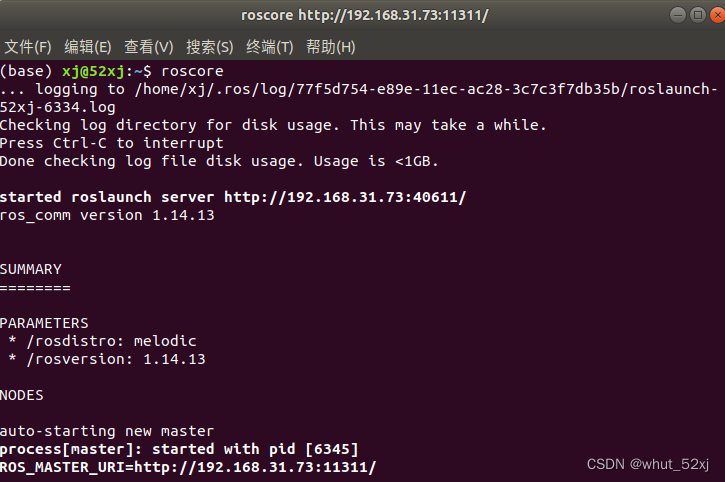
1.6验证
在主机终端输入
roscore
在从机终端输入
rosrun turtlesim turtlesim_node
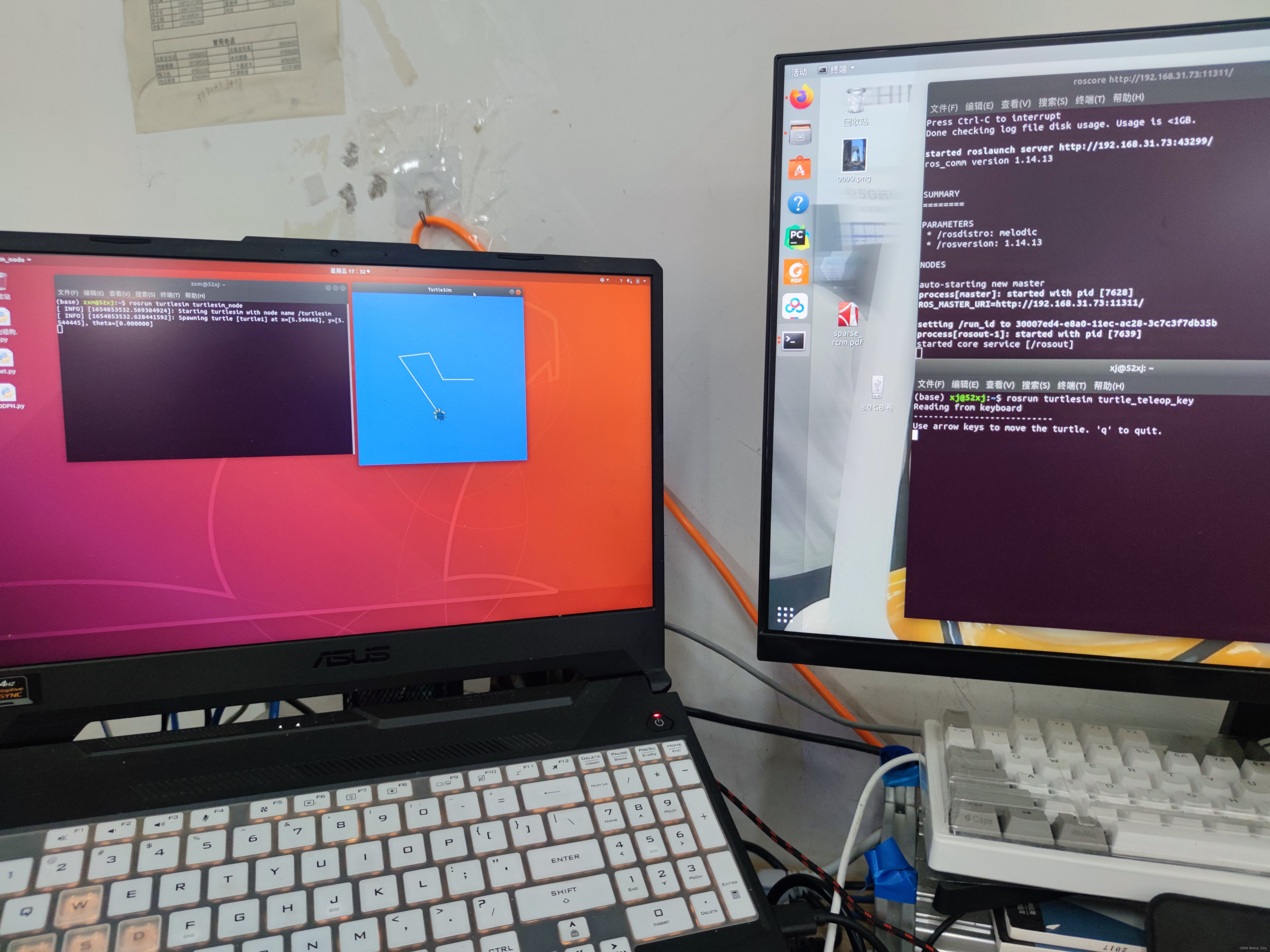
在主机终端输入
rosrun turtlesim turtle_teleop_key
可在主机的键盘上控制从机上的小乌龟运动了,显示在从机上.
最后
以上就是勤恳石头最近收集整理的关于ROS分布式多机通信(主从机配置)的全部内容,更多相关ROS分布式多机通信(主从机配置)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复