车道标记传感器提供有关道路上存在的车道线的信息。这些信息以车道线和扫描线相对于传感器的交叉点的形式提供。车道标记传感器的功能和使用可以在车道保持的例子中找到。
车道标记数据
主要是,车道标记传感器提供描述车道线和路边线上交叉点的数据。交叉点最多可以计算四个前方扫描平面。前瞻扫描垂直于传感器的孔径,并以传感器正前方为中心。扫描线的可视化见下图。
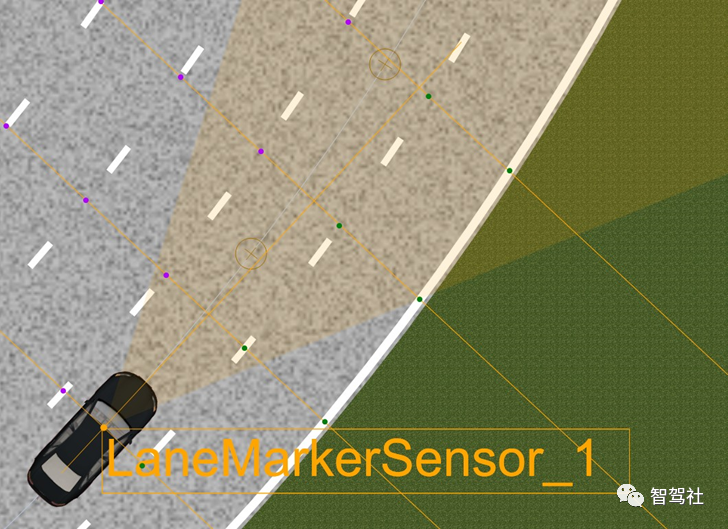
扫描线的可视化
每次扫描都会测量与车道上存在的车道线的交点。这些线是数学定义的近似值,近似值的精度受实验的模型生成设置影响。由于车道标线传感器是一个理想化的传感器,路口数据来源于车道定义线,因此不一定与可见的车道标线重合。从图1中也可以看出这一点。标记图案的Lateral Offset也不影响定义线的检测。所以如果只定义了一个Lateral Offset相对较高的标记图案,那么可视标记和检测到的定义线是不重合的。
车道标记传感器每次扫描都会确定以下交叉点:
o 左边最近的路边线交叉点。
o 右边最近的路边线交叉点。
o 左边最近的三条车道线交叉口。
o 右边最近的3个车道线交叉口。
这里的术语 "最近"、"左 "和"右 "是相对于扫描中心(不是传感器)而言的,扫描中心总是在传感器的正前方。
交叉口的可用数据如下:
o 车道线类型(无、车道、中心或路边)
o 与行相关的标签<
最后
以上就是细腻纸飞机最近收集整理的关于PreScan快速入门到精通第三十六讲PreScan中使用车道线传感器的全部内容,更多相关PreScan快速入门到精通第三十六讲PreScan中使用车道线传感器内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复