TruckSim2016.1,其他没试过
本人设计MPC控制器对三轴半挂车进行路径跟踪控制。在Simulink中搭建MPC控制器,TruckSim中搭建三轴半挂车模型。将MPC控制器计算出的前轮转角输入给TruckSim。
工况设置如下图:
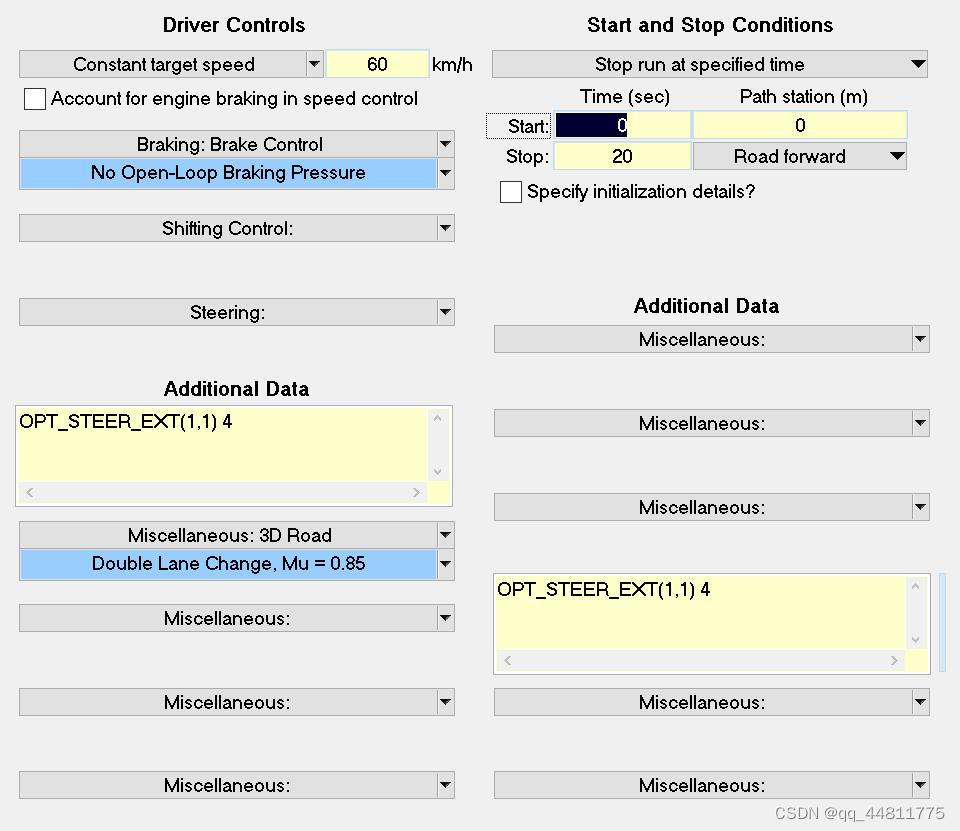
其中,steering工况如果设置为constant:0,在前轮转角输入为0的情况下,车辆仍然会朝着一个方向转向行驶。而如果设置为图中所示,即“no dateset”,同样在前轮转角输入为0的情况下,车辆会沿着直线行驶。
变量输入设置如下图:
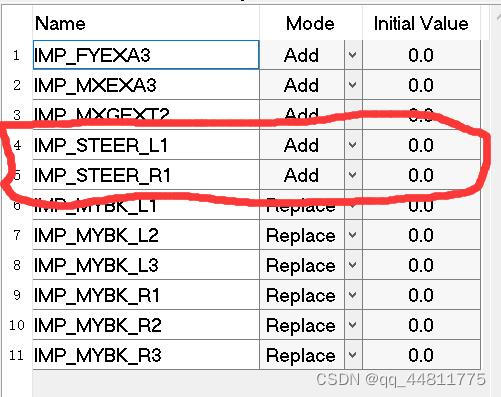
主要为前轮转角为4、5两个变量,其他变量是我进行其他控制所添加的,不必在意。
其中最重要的就是勾选"Advanced stttings",在下方窗口添加代码:
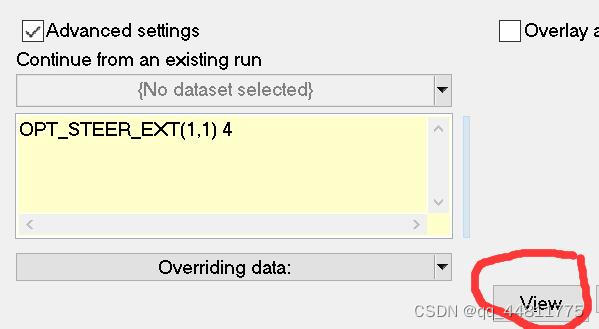
这串代码是与Carsim有区别的。详细功能和使用方式可点击上图中的“View”。
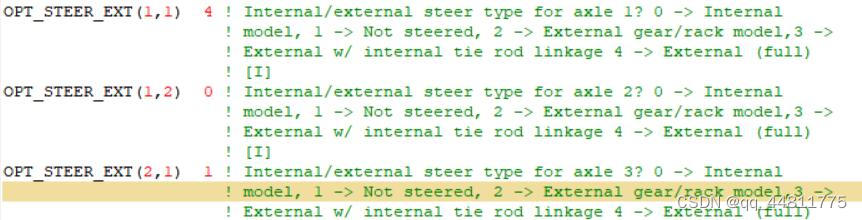
这里我稍作解释:
因为我选用的是三轴车型,所以(1,1)、(1,2)、(2,1)分别对应车辆的三轴,后面的空格加数字也分别代表不同意思。
1:内部转向模型,也就是不施加外部转向控制;
2:外部齿轮模型;(未使用过,猜测可能是改变传动比的)
3:外部带传动连接;(未使用过,猜测也重要的是传动比)
4:外部模型;(可直接输入车轮转角)
这里做4轮转向的同学要注意,不同的标号对应不同的轴。
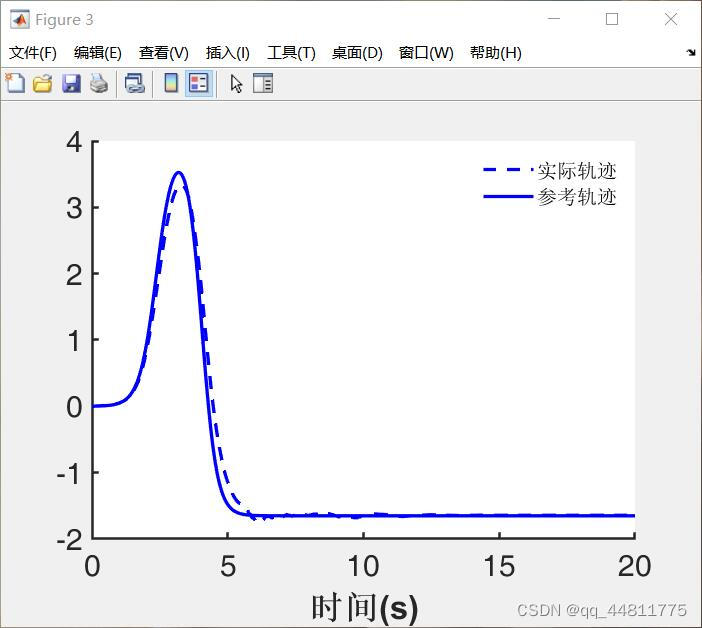
到这里应该能实现外部转角输入了。本来研究了很久都不能直接输入前轮转角,一度想要放弃,想将前轮转角转化为方向盘转角输入给TruckSim,所幸又坚持了一上午仔细看了View文件。最后路径跟踪的效果还算理想。
感谢大家看我废话这么多。
最后
以上就是年轻帽子最近收集整理的关于TruckSim外部车轮转角输入的全部内容,更多相关TruckSim外部车轮转角输入内容请搜索靠谱客的其他文章。








发表评论 取消回复