局部动态地图(Local dynamic map :LDM)简介
局部动态地图(Local Dynamic Map)最早在欧洲的C-ITS项目SAFESPOT中提出,它是ITS框架中的重要组成部分。下面分别从ITS系统简介、LDM组成和LDM应用三大部分来对LDM进行一个简单的介绍。
1、ITS系统简介
智能交通系统(ITS)包含了很多涉及到汽车、火车、轮船、飞机等各种交通工具,概述如下图所示

ITS由应用层、安全层、管理层、接入层、网络及传输层、设备层6部分组成。LDM位于ITS框架中的设备层。ITS整体框架如下图所示
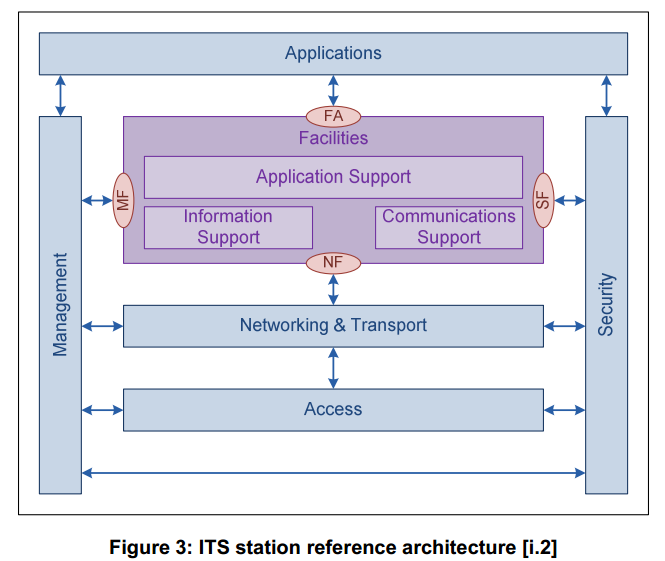
ETSI标准框架一
ITS 框架二
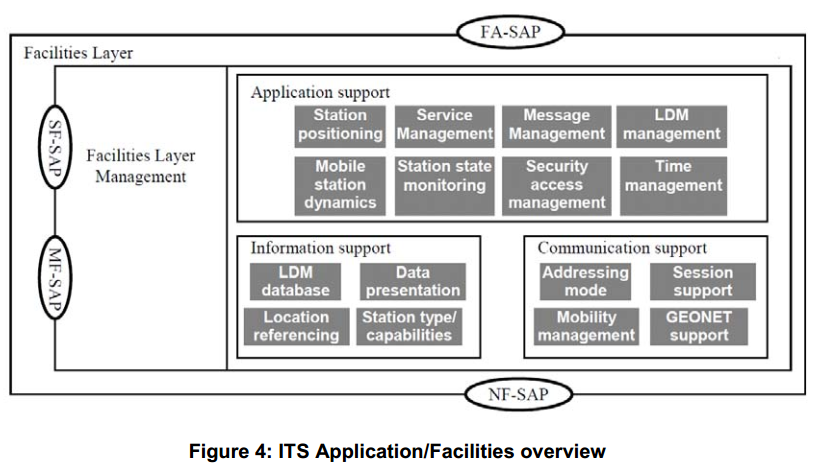
整个设备层的组成如下图所示
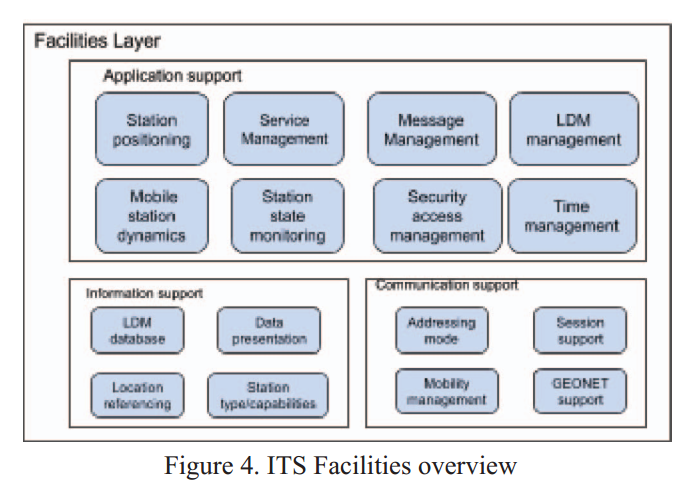
整个设备层作用是对应用程序提供支持、对通信提供支持、还有提供信息数据等功能。
2、LDM的组成
局部动态地图(Local Dynamic Map :LDM) 是C-ITS中的核心关键技术之一,其概念最早在SAFESPOT项目中提出,在后来的智能交通项目如CVIS、DRIVE-C2X、eCoMove中得到了广泛应用和发展。目前LDM已经成为欧洲ETSI 标准中的重要组成ETSI TR 102 863 V1.1.1。
2.1 LDM架构
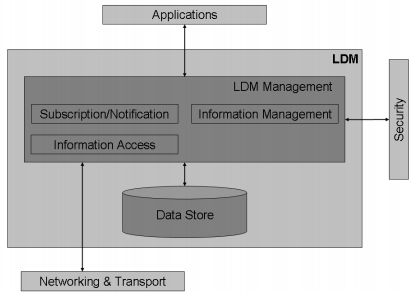
整个LDM的内部架构如下图所示,这张图中可以看出LDM的组成为LDM管理和数据存储。LDM管理中的通知和订阅功能是指处理各种应用程序的订阅请求;对应用程序的订阅请求提供一个过滤机制;发送通知或者订阅的信息给应用程序。信息管理功能是指LDM接收CAM、DENM或者TPEG消息;将接收的信息存储在数据库;对LDM进行维护(如丢掉不相关的数据);处理应用程序的需求。信息访问功能主要是接收应用程序的请求;对请求信息进行解码和过滤;确保请求满足安全边界;从LDM数据库中提取数据。
LDM管理与数据库之间的主要联系是存储相关的信息;支持对数据库中的数据进行插入、更新、删除。
2.2 LDM数据分类
LDM需要能提供安全和准确的数据访问服务。ITS基站中的LDM数据来自车辆、道路基础设施、交通管理中心和车载传感器等,如下图所示。
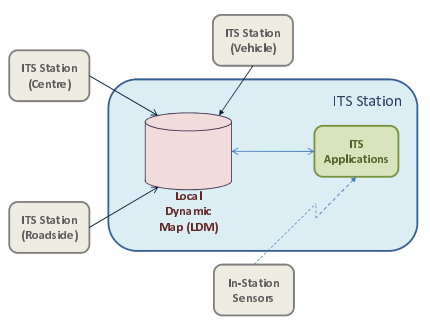
LDM存储的数据能够描述真实的对象,整个LDM存储的数据可以分为四大类。
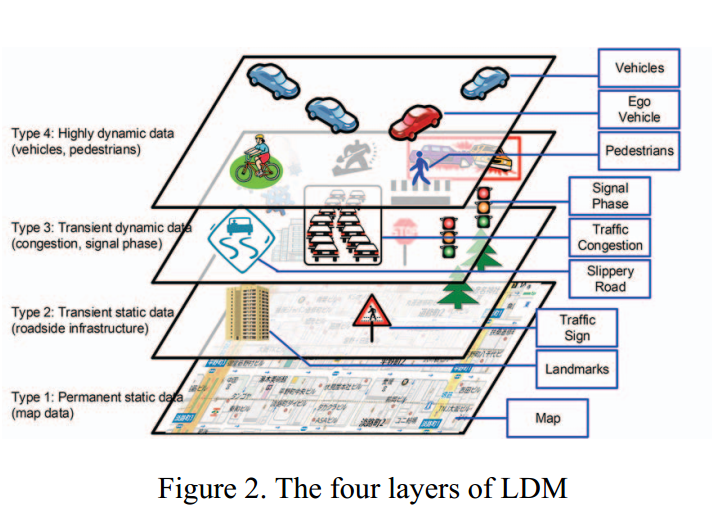
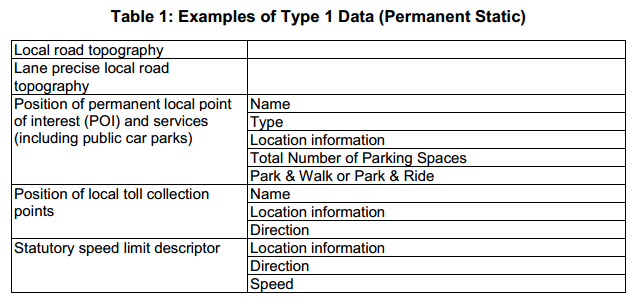
第一类为持续静态数据,它主要包括地图信息。
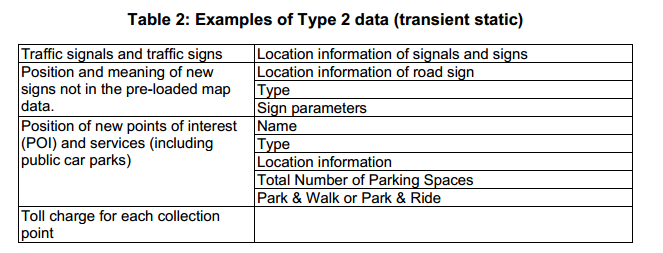
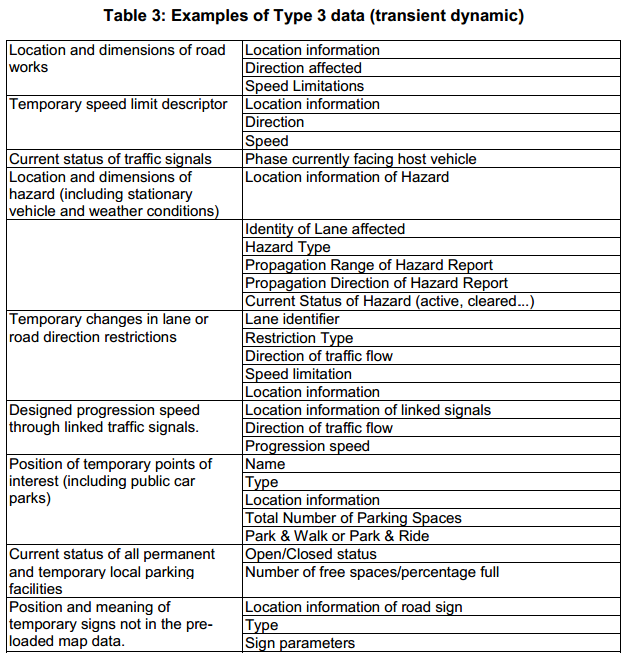
第二类为瞬时静态数据,它主要包含了路侧的基础设施的信息,如交通标识和路标。
第三类为瞬时动态数据,它主要包含了红绿灯的相位、交通拥堵等相关信息。
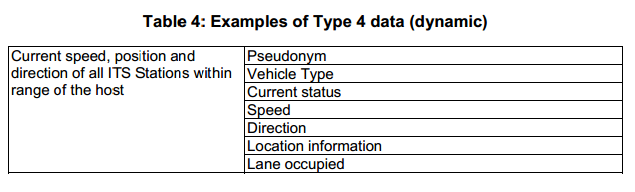
第四类为高度动态数据,它主要包含了车辆、行人等交通参与者的实时状态数据。
2.3 LDM接口
LDM包含的主要三类接口为外部提供各种服务。
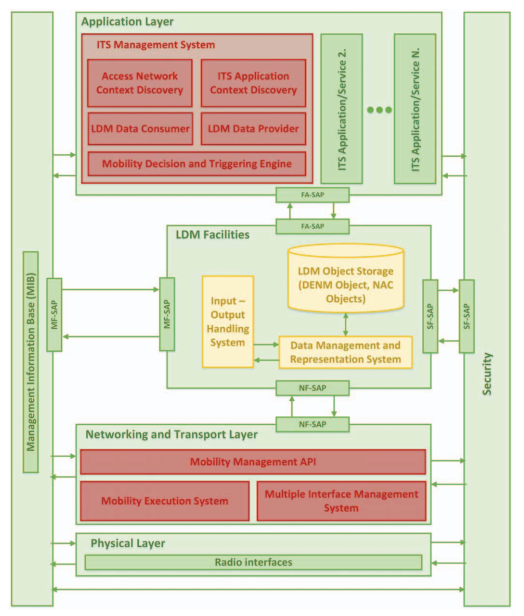
LDM的三类接口是指LDM-FA-SAP (应用)、LDM-NF-SAP (网络)、LDM-SF-SAP (安全)。
LDM-NF-SAP (网络)接口让LDM能够接收CAM、DENM和TPEG消息集中的消息。CAM消息集包含周围车辆的路侧信息,周期发送;DENM消息集主要包含对道路安全和效率有影响的事件信息,事件触发;TPEG消息集提供对交通效率有影响的交通和行程消息。
进入LDM中上述消息做了如下处理
- 将消息进行解码转变了LDM中的对象。
- 检查该对象在LDM是否存在,如果存在则对象进行更新,如果不存在则插入新的对象
LDM-FA-SAP(应用)接口能够让应用能够请求获得LDM中的相关数据。主要涉及到访问管理、数据管理、数据访问和修改管理功能。
访问管理功能
1)查询LDM能够提供的服务类型
2)获得访问LDM的权限
数据管理功能
1)向订阅的应用程序发送通知
2)订阅或者取消订阅相关功能
3)设置订阅参数
数据访问和修改管理功能
1)增加、更新和删除数据
2)读取数据
LDM-SF-SAP(安全)接口主要对访问ITS基站提供安全功能,避免第三方应用程序滥用LDM中的数据。
3、LDM应用
SAFESPOT项目提出了LDM概念,采用PostgreSQL来作为数据库管理系统(DBMS),通过PostGIS作为一个库来扩展postgreSQL的空间操作,通过PL/pgSQL来实现存储过程。最后通过C++编写的API来调用LDM。
目前有报导LDM应用有Bosch 和Tele Atlas公司采用PG-LDM;以及NAVTEQ 公司的NAVTEQ-LDM。PG-LDM 采用postgreSQL 数据库;NAVTEQ-LDM 采用的是SQLite数据库,它是一种轻型的数据库,本身是用C语言编写,广泛应用在嵌入式设备中, Android 和iOS的APP应用都可以集成。
SAFESPOT项目中定义的数据模型如下,这些数据模型是存放在前面提到的数据库中。
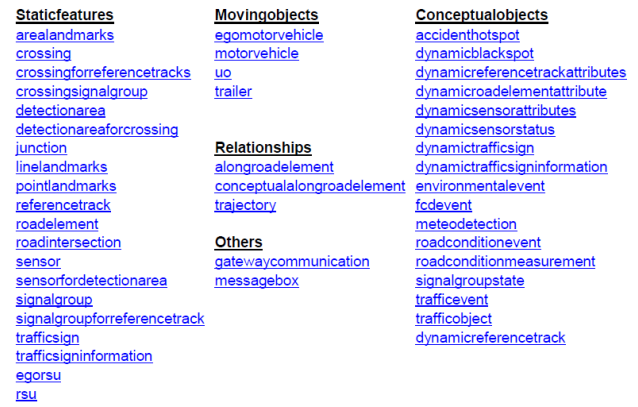
这些数据模型就是存在在数据库中的各种表格。
地图数据的获取方法如下:
地图数据通过OpenStreetMap这个开源地图数据获得,Vissim和sumo都可以这种方式获得地图数据。获取地图数据的过程如下所示
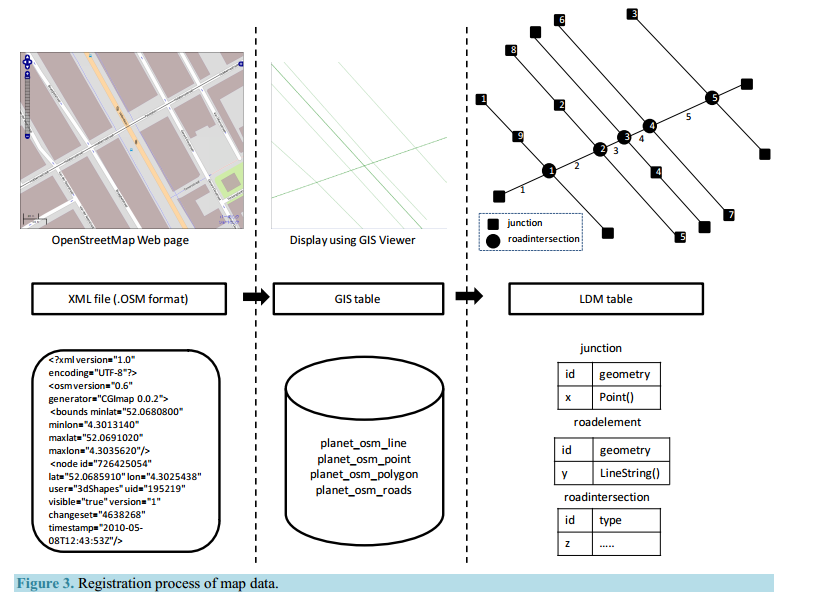
- 在openStreetMap的web界面选取需要的区域。
- 将选定的目标区域下载成一个.osm的文件。
- 将下载的.osm文件转变为为PostgreSQL数据库中的数据。通过 osm2pgsql 工具生成的planet_osm_line, planet_osm_point, planet_osm_polygon, and planet_osm_roads 这几张表。
- 包含的线串数据中提取线串端点作为点类型数据,并将这些数据存储在LDM junction表中。
- 行星线中包含的linestring数据中提取相邻点类型数据,并将这些linestring数据存储在LDM roadelement表中。
- 在planet_osm_line 中搜索交叉路口的LineString数据,并将这些数据存储在LDM roadintersection表中。
车辆数据的获取方法如下:
车辆相关的数据表包含了各种类型的传感器数据(如位置、速度、加速度信息),通过prescan生成车辆传感器模型和驾驶场景。
生成车辆数据的具体步骤:
- 将OpenStreetMap的地图数据导入PreScan。
- 配置车辆的行驶路径和场景信息。
- 生成simulink模型并且配置车辆的传感器的参数。
- 运行仿真程序,输出车辆的位置及传感器的数据进入.csv文件中。
通过上述方法可以生成LDM 中的车辆相关的表egomotorvehicle, motorvehicle。
LDM实验
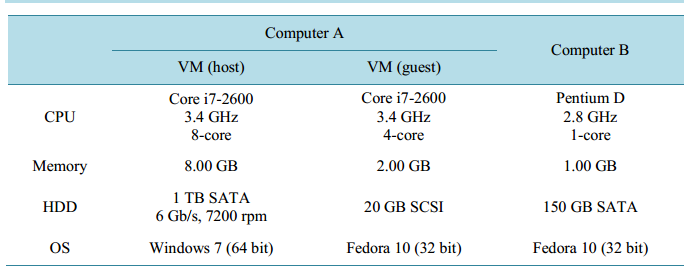
在电脑上进行了仿真实验,本实验采用了两台电脑,电脑的配置如下。
选用两台电脑是为了对比不同电脑配置,整个程序不同子程序模块需要的运行时间。
其中一台电脑有LDM,API,纵向碰撞预警(LCRW)应用、更新程序、车辆数据,实验中假设V2V通信没有延时和丢包。更新程序的目的是不断的更新车辆的数据。具体框架如下
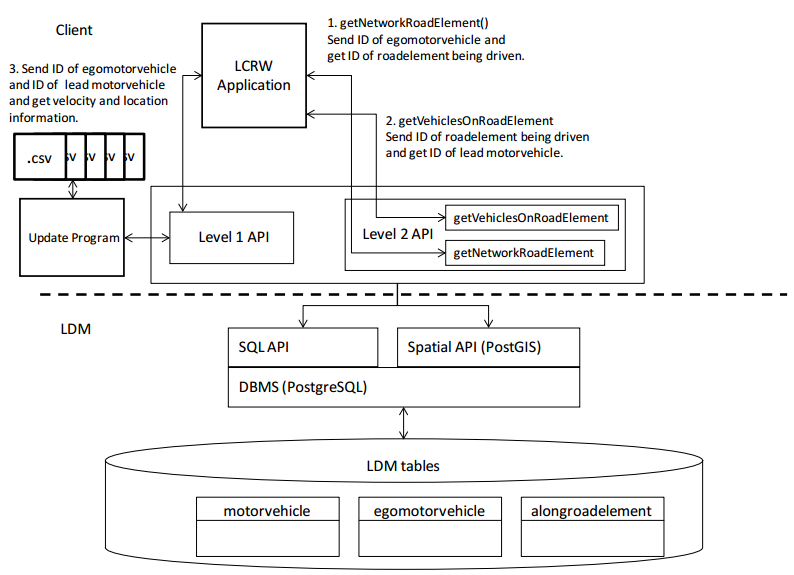
实验中LDM中的车辆数据表格的更新周期为50ms。主车和从车的信息分别存储在表egomotorvehicle和motorvehicle表中。
LCRW应用的流程图
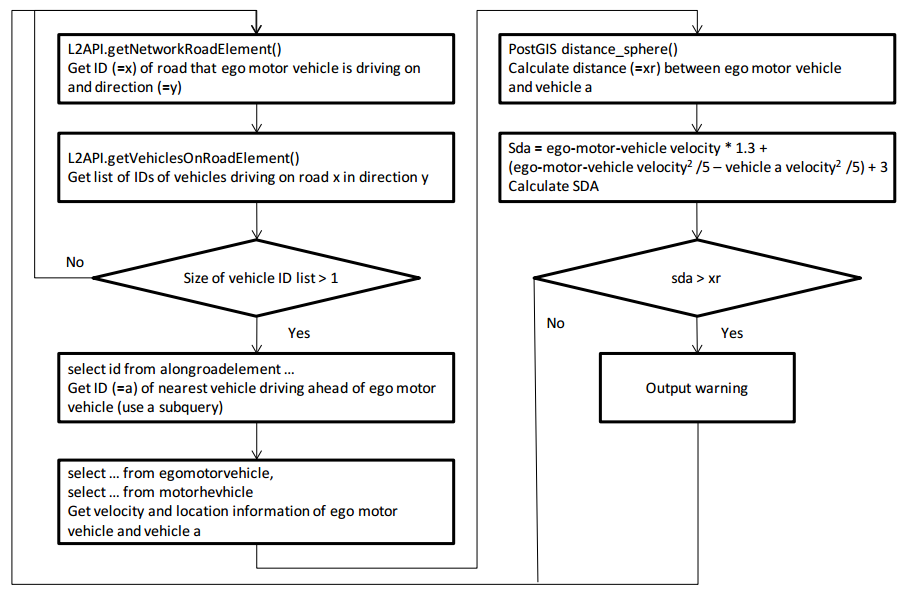
sda为主车与目标车之间的安全停止距离,比较安全距离与实际的距离来决定是否进行预警。
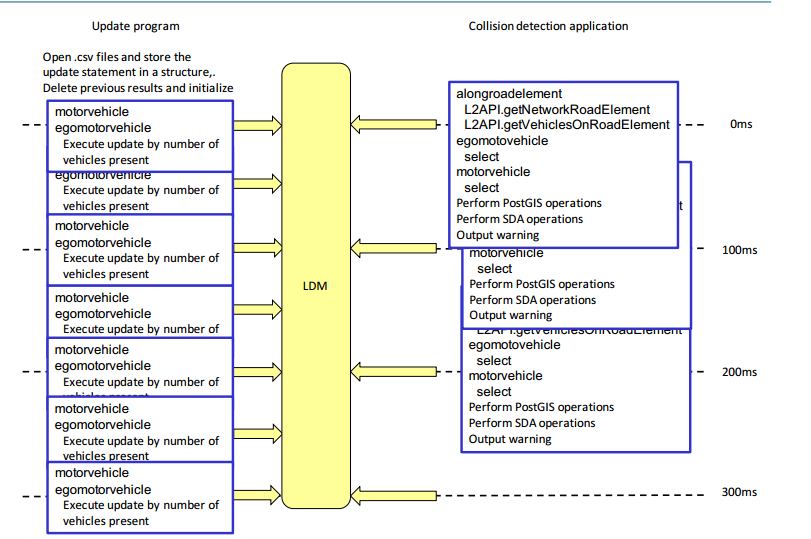
图中LCRW应用的运行周期为100ms,车辆数据的更新周期为50ms。这个实验对比了总共有5辆车、10辆车、20辆车的运行情况,比较了不同子程序需要的计算时间。
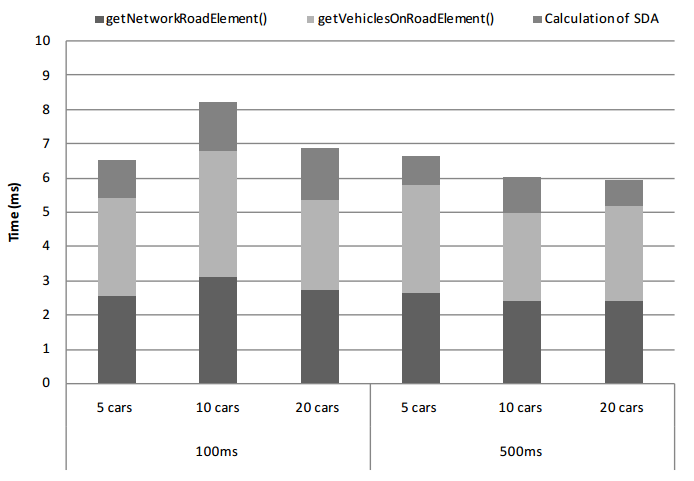
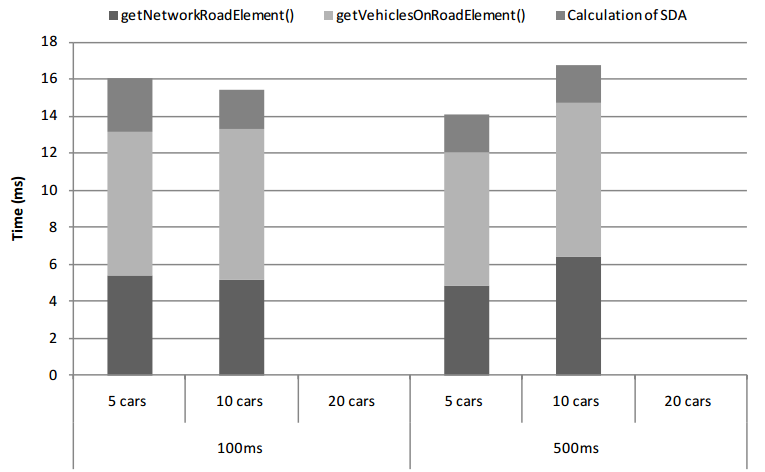

更新程序的运行时间随着车辆数量的增加有显著地增长。
4、参考文献
1、Efficient and unique identifier for V2X events aggregation in the local dynamic map
2、Implementation and Evaluation of Local Dynamic Map in Safety Driving Systems
3、Towards a Semantically Enriched Local Dynamic Map
4、Middleware structure using Local Dynamic Map within its environment
5、ETSI TR 102 863 (V1.1.1) (2011) Intelligent Transport Systems (ITS): Vehicular Communications; Basic Set of Applications; Local Dynamic Map (LDM) Rationale for and Guidance on Standardization
最后
以上就是故意手机最近收集整理的关于局部动态地图(LDM)的介绍局部动态地图(Local dynamic map :LDM)简介的全部内容,更多相关局部动态地图(LDM)的介绍局部动态地图(Local内容请搜索靠谱客的其他文章。








发表评论 取消回复