一、项目介绍
随着小米宣布造车,当下“软件定义汽车”的趋势如火如荼,autosar的全称Automotive Open System Architecture,即汽车开放软件架构,这正如TCP/IP对网络进行统一,autosar是对汽车软件技术的统一,TCP/IP制定的初衷是为统一网络标准从而诞生了今天的互联网,而AUTOSAR的制定是为实现汽车电子软件的统一从而实现汽车电子软件的复用。本项目是基于autosar3.1的开源代码arctic core,在此基础上,完成在n32g45x上的mcal驱动,适配RT-Thread内核为autosar的操作系统。
目前已完成mcal的mcu驱动,autosar的osek操作系统已经能在n32g45x上正常调度,移植rtthread到arctic core,但是在适配OSEK/VDX的接口过程中,发现这个适配工作不是一两个月所能完成,因为osek/vdx的标准非常严格,如果对OSEK/VDX感兴趣的小伙伴可以一起加入rtthread对osek/vdx的适配。
二、简述AUTOSAR及OSEK/VDX
2.1 AUTOSAR的分层模型及各层简述
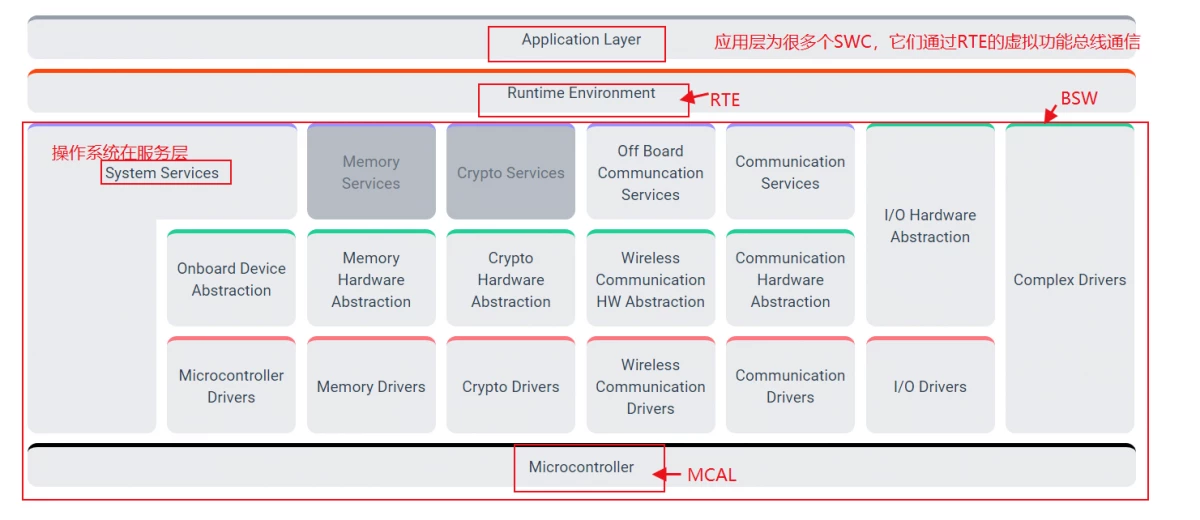
AUTOSAR从上往下分为应用层、RTE层和基础软件层(BSW)。
应用层由多个软件组件SWC组成,每个SWC是具有一定功能的模块,如汽车发动机控制逻辑,这些模块可以由matlab的autosar软件包依据模型进行设计;RTE全称Runtime Environment,即运行时环境,它的内部是一条autosar框架定义的虚拟功能总线(VFB),SWC、BSW通过这条虚拟功能总线进行通信。
BSW从上到下分为服务层、ECU抽象层、MCU抽象层,分层的目的是为了实现各层的复用和对下一层的隔离,这正如RT-Thread的分层思想那样,RT-Thread可以适配不同的MCU就是因为采用了驱动和设备分离的策略,RT-Thread的同一个设备因为注册了不同的驱动就可以驱动不同的MCU。在AUTOSAR中,和MCU有关的一层是MCU抽象层,及MCAL,用RTT的驱动和设备分离的思想来理解autosar的mcal就是同一个ECU抽象层因为注册了不同的MCU驱动就可以驱动不同的MCU。在autosar的成员中就有nxp这样的芯片原厂提供autosar的mcal。
2.2 简述OSEK/VDX接口api
在autosar的服务层中有一个符合OSEK/VDX标准的操作系统,负责内存管理、对各个功能的调度,api分为任务管理、中断处理、事件机制、资源管理、报警器。
2.2.1 任务管理api
StatusType ActivateTask ( TaskType <TaskID> )
将任务号为TaskID的任务由挂起态变为就绪态。
StatusType TerminateTask ( void )
将任务由就绪态转为挂起态。
StatusType ChainTask ( TaskType <TaskID> )
将当前任务由就绪转为挂起,并将TaskID的任务由挂起转为就绪,相当于TerminateTask和ActivateTask的连用。
StatusType Schedule ( void )
执行一次调度。
2.2.2 事件api
StatusType SetEvent ( TaskType <TaskID> EventMaskType <Mask> )
设置一个事件位,当执行SetEvent后等待该事件位的任务可以由等待态变为就绪态。
StatusType ClearEvent ( EventMaskType <Mask> )
清楚事件位
StatusType GetEvent ( TaskType <TaskID> EventMaskRefType <Event> )
返回TaskID任务的所有事件位
StatusType WaitEvent ( EventMaskType <Mask> )
等待事件位,等待事件位的任务由就绪态转为等待态。
2.2.3 报警器(闹钟)api
StatusType GetAlarmBase ( AlarmType <AlarmID>, AlarmBaseRefType <Info> )
获取报警器的时基
StatusType GetAlarm ( AlarmType <AlarmID> TickRefType <Tick>)
获取闹钟当前的tick
StatusType SetRelAlarm ( AlarmType <AlarmID>, TickType <increment>, TickType <cycle> )
设置相对闹钟
StatusType SetAbsAlarm ( AlarmType <AlarmID>, TickType <start>,
TickType <cycle> )
设置绝对闹钟
StatusType CancelAlarm ( AlarmType <AlarmID> )
取消闹钟
三、AUTOSAR开源代码arctic core软件框架和分析
3.1 相关资源链接
arctic core官网:http://dev.arccore.com/public/user-doc/UD441x/Arctic-Core-4.0_9503291.html
arctic core源码获取 http://my.arccore.com/hg
源码构建说明 http://dev.arccore.com/public/userdoc/UD441x/Makesystem_23789620.html
3.2 软件框架说明
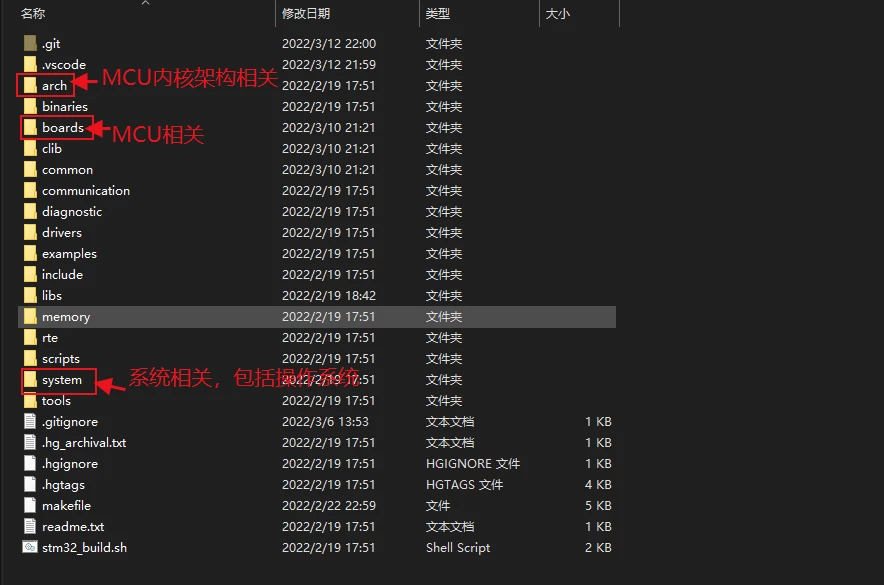
在arch文件夹中的文件为MCU内核架构相关的文件,如cortex-m3,主要内容为M3的启动文件(见M3编程指南),MCU的固件库。
在boards文件夹中的文件为各个MCU的实现,包括对板子的配置。
system文件夹中包含了一个OSEK/VDX标准的操作系统。
四、在N32G45X上完成AUTOSAR的MCAL
以MCU驱动的时钟设置为例,static void SetClocks(Mcu_ClockSettingConfigType *clockSettingsPtr)是autosar的mcal定义的一个接口,用于设置MCU的时钟,在n32g45x的实现如下:
/**
* Set bus clocks. SysClk,AHBClk,APB1Clk,APB2Clk
*/
static void SetClocks(Mcu_ClockSettingConfigType *clockSettingsPtr)
{
volatile uint32 StartUpCounter = 0, HSEStatus = 0;
/* SYSCLK, HCLK, PCLK2 and PCLK1 configuration ---------------------------*/
/* Enable HSE */
RCC->CTRL |= ((uint32_t)RCC_CTRL_HSEEN);
/* Wait till HSE is ready and if Time out is reached exit */
do
{
HSEStatus = RCC->CTRL & RCC_CTRL_HSERDF;
StartUpCounter++;
} while((HSEStatus == 0) && (StartUpCounter != HSEStartUp_TimeOut));
if ((RCC->CTRL & RCC_CTRL_HSERDF) != RESET)
{
HSEStatus = (uint32_t)0x01;
}
else
{
HSEStatus = (uint32_t)0x00;
}
if (HSEStatus == (uint32_t)0x01)
{
/* Enable Prefetch Buffer */
FLASH->AC |= FLASH_AC_PRFTBFEN;
/* Flash 2 wait state */
FLASH->AC &= (uint32_t)((uint32_t)~FLASH_AC_LATENCY);
FLASH->AC |= (uint32_t)FLASH_AC_LATENCY_2;
/* HCLK = SYSCLK */
RCC->CFG |= (uint32_t)RCC_CFG_AHBPRES_DIV1;
/* PCLK2 = HCLK */
RCC->CFG |= (uint32_t)RCC_CFG_APB2PRES_DIV1;
/* PCLK1 = HCLK */
RCC->CFG |= (uint32_t)RCC_CFG_APB1PRES_DIV2;
#ifdef STM32F10X_CL
/* Configure PLLs ------------------------------------------------------*/
/* PLL2 configuration: PLL2CLK = (HSE / 5) * 8 = 40 MHz */
/* PREDIV1 configuration: PREDIV1CLK = PLL2 / 5 = 8 MHz */
RCC->CFG2 &= (uint32_t)~(RCC_CFG2_PREDIV2 | RCC_CFG2_PLL2MUL |
RCC_CFG2_PREDIV1 | RCC_CFG2_PREDIV1SRC);
RCC->CFG2 |= (uint32_t)(RCC_CFG2_PREDIV2_DIV5 | GetPll2ValueFromMult(clockSettingsPtr->Pll2) |
RCC_CFG2_PREDIV1SRC_PLL2 | RCC_CFG2_PREDIV1_DIV5);
/* Enable PLL2 */
RCC->CTRL |= RCC_CR_PLL2ON;
/* Wait till PLL2 is ready */
while((RCC->CTRL & RCC_CR_PLL2RDY) == 0)
{
}
/* PLL configuration: PLLCLK = PREDIV1 * 9 = 72 MHz */
RCC->CFG &= (uint32_t)~(RCC_CFG_PLLXTPRE | RCC_CFG_PLLSRC | RCC_CFG_PLLMULL);
RCC->CFG |= (uint32_t)(RCC_CFG_PLLXTPRE_PREDIV1 | RCC_CFG_PLLSRC_PREDIV1 |
GetPllValueFromMult(clockSettingsPtr->Pll1));
#else
/* PLL configuration: PLLCLK = HSE * 9 = 72 MHz */
RCC->CFG &= (uint32_t)((uint32_t)~(RCC_CFG_PLLSRC | RCC_CFG_PLLHSEPRES |
RCC_CFG_PLLMULFCT));
RCC->CFG |= (uint32_t)(RCC_CFG_PLLSRC_HSE | GetPllValueFromMult(clockSettingsPtr->Pll1));
#endif /* STM32F10X_CL */
/* Enable PLL */
RCC->CTRL |= RCC_CTRL_PLLEN;
/* Wait till PLL is ready */
while((RCC->CTRL & RCC_CTRL_PLLRDF) == 0)
{
}
/* Select PLL as system clock source */
RCC->CFG &= (uint32_t)((uint32_t)~(RCC_CFG_SCLKSW));
RCC->CFG |= (uint32_t)RCC_CFG_SCLKSW_PLL;
/* Wait till PLL is used as system clock source */
while ((RCC->CFG & (uint32_t)RCC_CFG_SCLKSTS) != (uint32_t)0x08)
{
}
}
else
{ /* HSE fails to start-up, the application will have wrong clock */
NVIC_SystemReset();
}
}
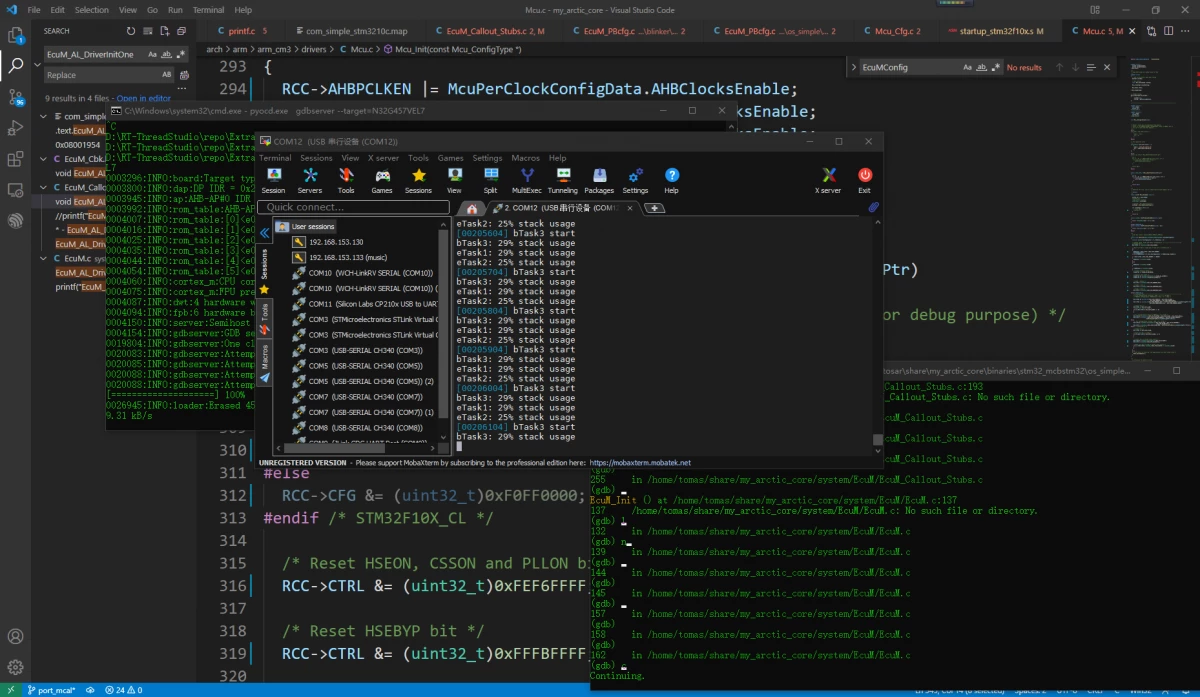
写好mcal的mcu后编译成可执行文件下载到板子上,AUTOSAR能够在n32g45x上正常运行,可以看到三个任务块在调度。下载工具用的是pyocd。
五、RT-THREAD的移植
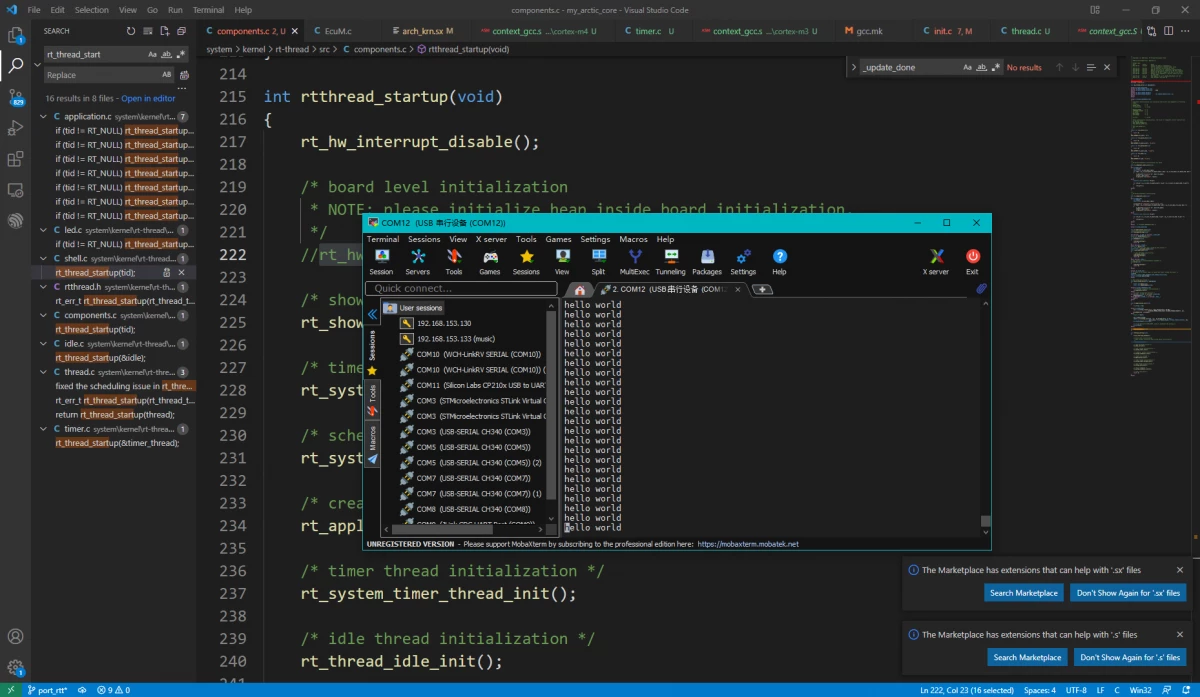
由于源码采用的构建工具是makefile,所以需要将rtthread的源码和头文件路径添加到makefile文件。编译下载到板子上可以看到rtthread正常运行。
六、仓库地址
由于arctic core没有github,不能采用fork的方式协作开发,我的代码上传到gitee提示版权风险无法转为公开的仓库,对源码感兴趣的小伙伴可以在下方留下gitee账号或发邮件给我369247354@qq.com,我拉你到项目组。源码从附件下载:
n32g_arctic_core.zip
七、总结和展望
本次移植过程中,mcal的移植较为轻松,适配n32g45x的寄存器花了不少时间,需要查看n32g45x的参考手册的寄存器定义一个一个的去改。移植rtthread到arctic core的源码比较简单,只是添加rtt的源码到arctic core的makefile。遗憾的是还没完成rtt适配OSEK/VDX的接口,希望对OSEK/VDX感兴趣的小伙伴加入进来,一起完成rtt对OESK/VDX的适配。
最后
以上就是多情大树最近收集整理的关于【AUTOSAR】基于RT-Thread内核的AUTOSAR在n32g上的实现一、项目介绍二、简述AUTOSAR及OSEK/VDX三、AUTOSAR开源代码arctic core软件框架和分析四、在N32G45X上完成AUTOSAR的MCAL五、RT-THREAD的移植六、仓库地址七、总结和展望的全部内容,更多相关【AUTOSAR】基于RT-Thread内核的AUTOSAR在n32g上的实现一、项目介绍二、简述AUTOSAR及OSEK/VDX三、AUTOSAR开源代码arctic内容请搜索靠谱客的其他文章。








发表评论 取消回复