1、ssh
2、挂载
3、启动小车
4、打开导航
roslaunch huanyu_robot_start navigation_slam.launch
5、打开rviz
6、运行
rosrun huanyu_robot_start show_mark.py
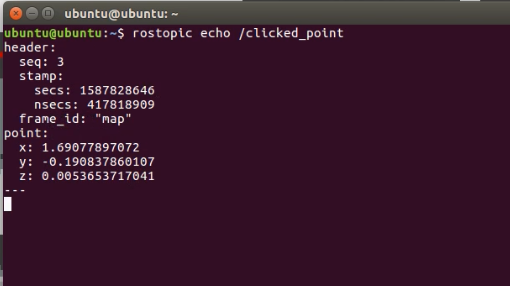
7、在rviz中定点

publishPoint按钮在点击的时候会发布一个点的信息
 可以自定义定点的数量,小车会按照定点来循环移动。
可以自定义定点的数量,小车会按照定点来循环移动。
最后
以上就是无情中心最近收集整理的关于幻宇树莓派麦克纳姆轮小车:多点巡航的全部内容,更多相关幻宇树莓派麦克纳姆轮小车内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复