从矩阵范数的定义中,多了一个相容性。因为抽象空间中的向量是不能乘的,但是矩阵是可以乘的。直接定义满足这四个条件的范数很难,直接定义非常麻烦。
为了定义相容的矩阵范数,引出一个方法:诱导范数。
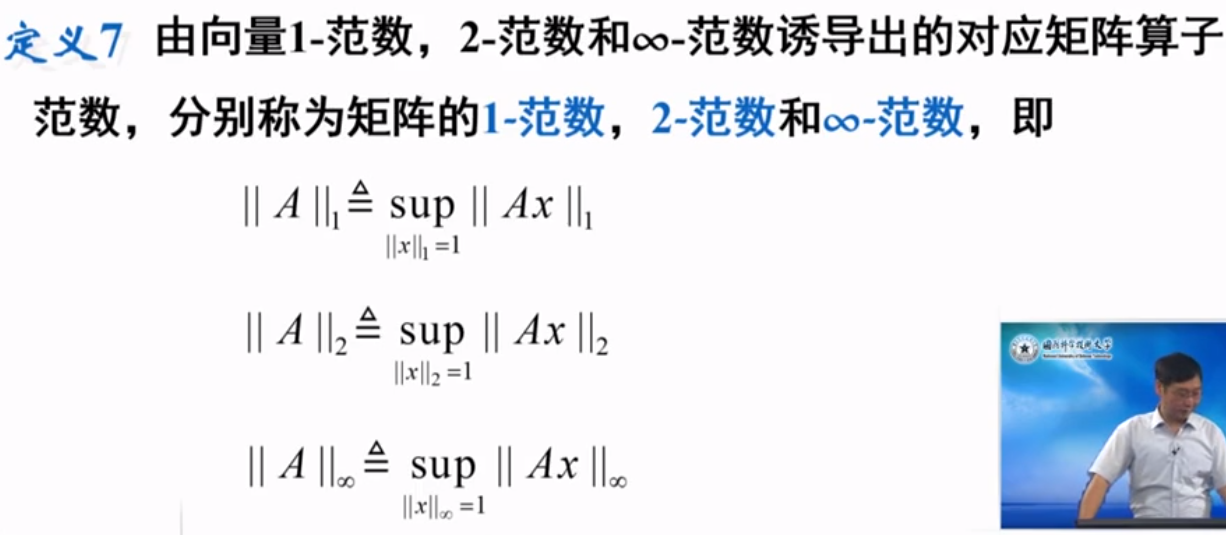
诱导范数的定义
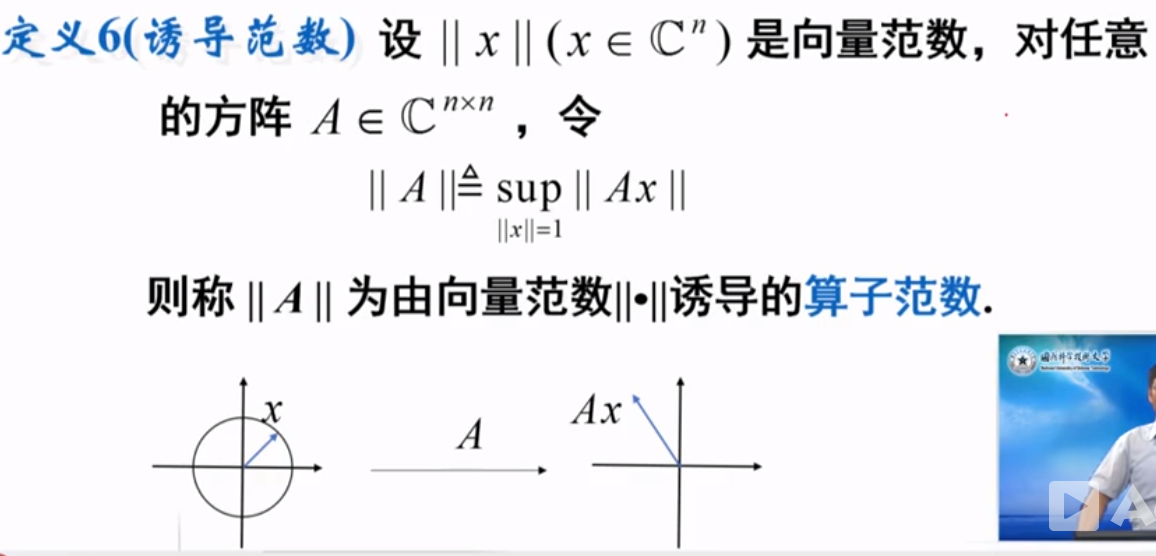
给矩阵A乘一个单位向量,相当于对单位向量做了一次变换,假设变换是下面图中所示的。
∣
∣
A
x
∣
∣
||Ax||
∣∣Ax∣∣就有一个长度,就是一个范数。我们把矩阵
A
A
A的范数称为
∣
∣
A
∣
∣
||A||
∣∣A∣∣.
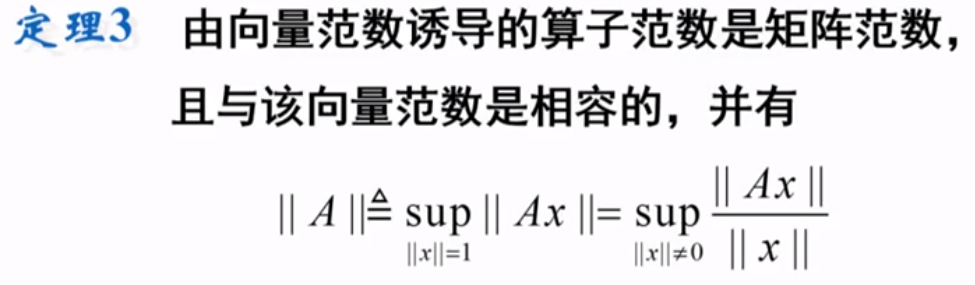
定理
证明
证两个方向
诱导范数和向量范数的相容性
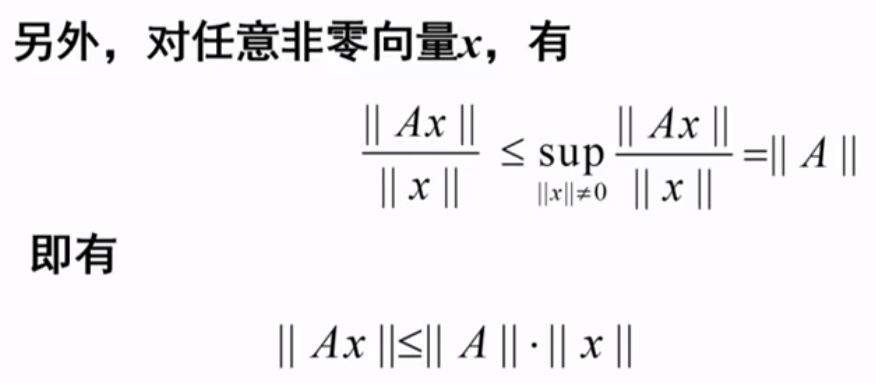
常用诱导范数
如果按定义去计算
∣
∣
A
x
∣
∣
||Ax||
∣∣Ax∣∣的范数会很麻烦,首先要计算
A
x
Ax
Ax,最后是一个向量,然后如果计算1范数的话,就在把每一列绝对值加和。
有种简单的计算方式:
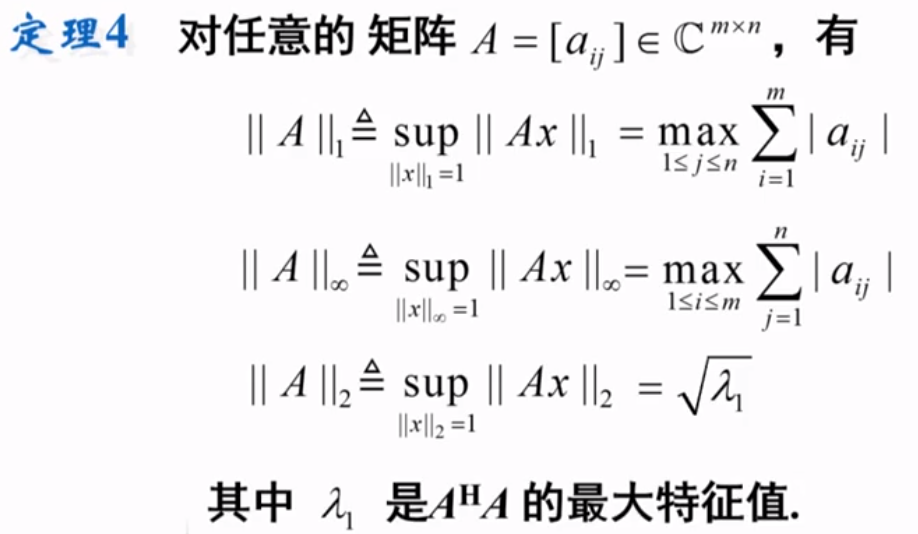
上面的公式解决了由向量1范数、2范数、无穷范数诱导出来的矩阵范数的计算。
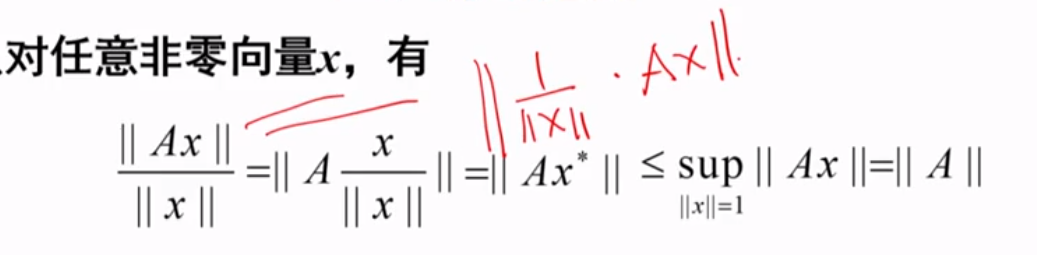
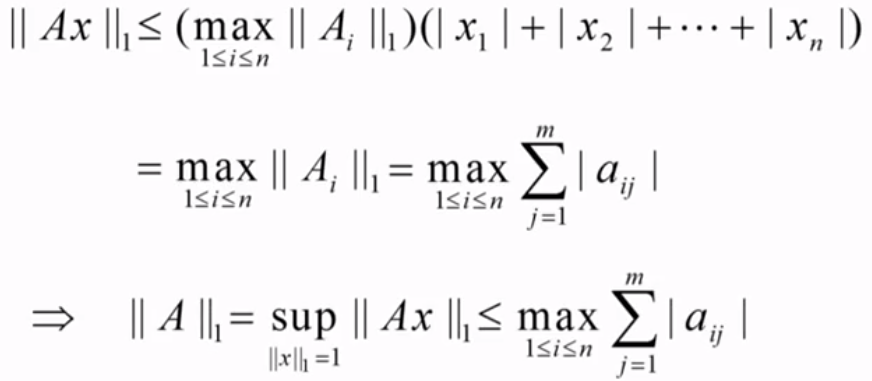
对一式进行证明:
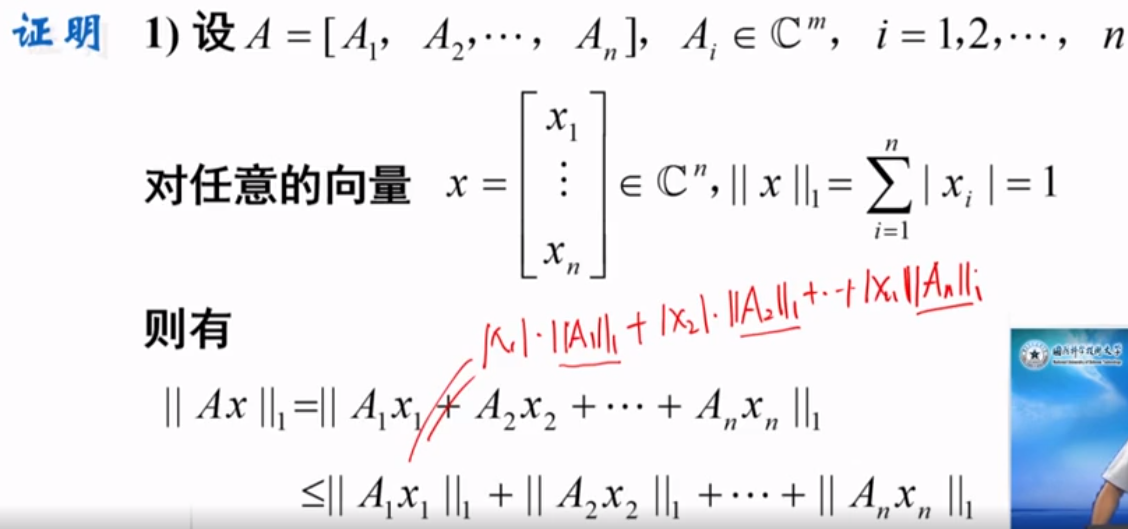
x
x
x是一个单位向量。注意诱导范数都是由单位向量诱导出来的。由于向量
x
x
x的1范数满足三角不等式,也就是
A
1
x
1
+
A
2
x
2
+
A
3
x
3
.
.
.
A_1x_1+A_2x_2+A_3x_3...
A1x1+A2x2+A3x3...满足三角不等式,所以可以写成下面的形式。
先证小于等于:
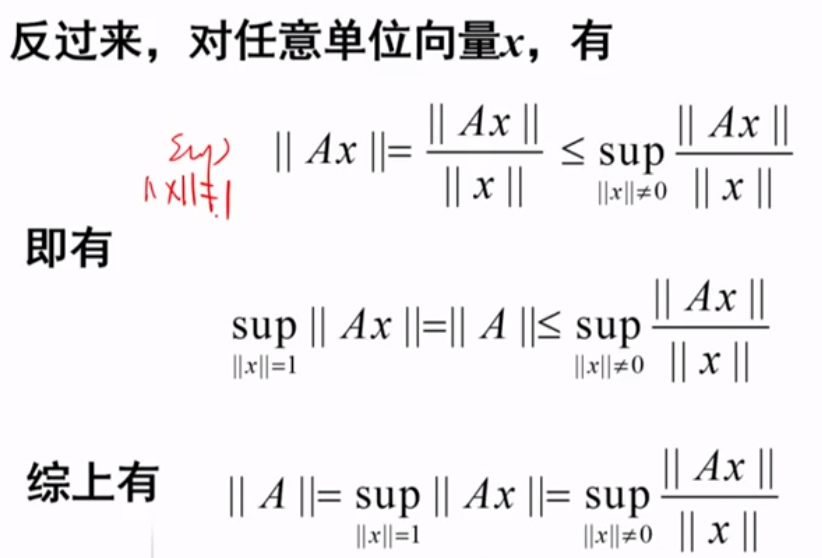
取了个特殊的向量证大于等于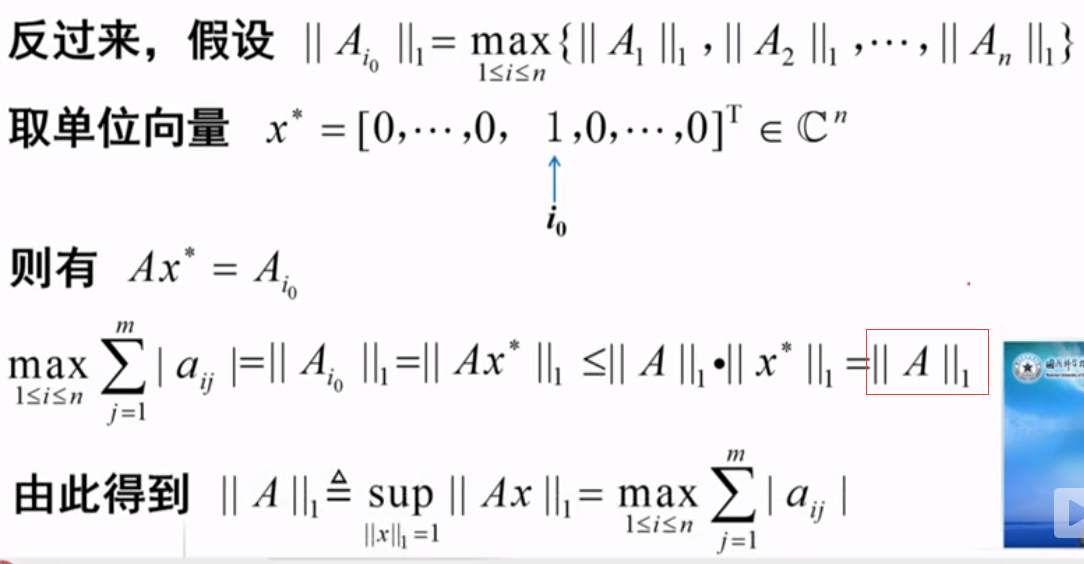
从而只能相等。
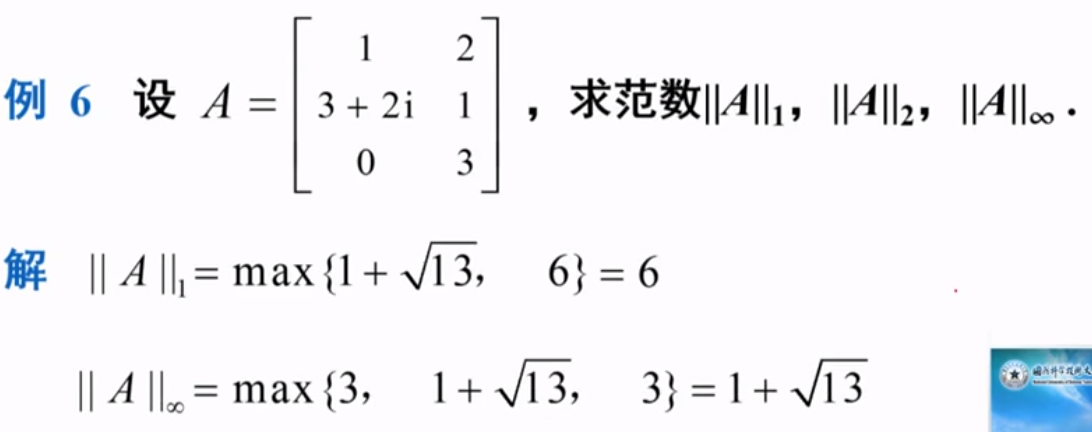
范数例题
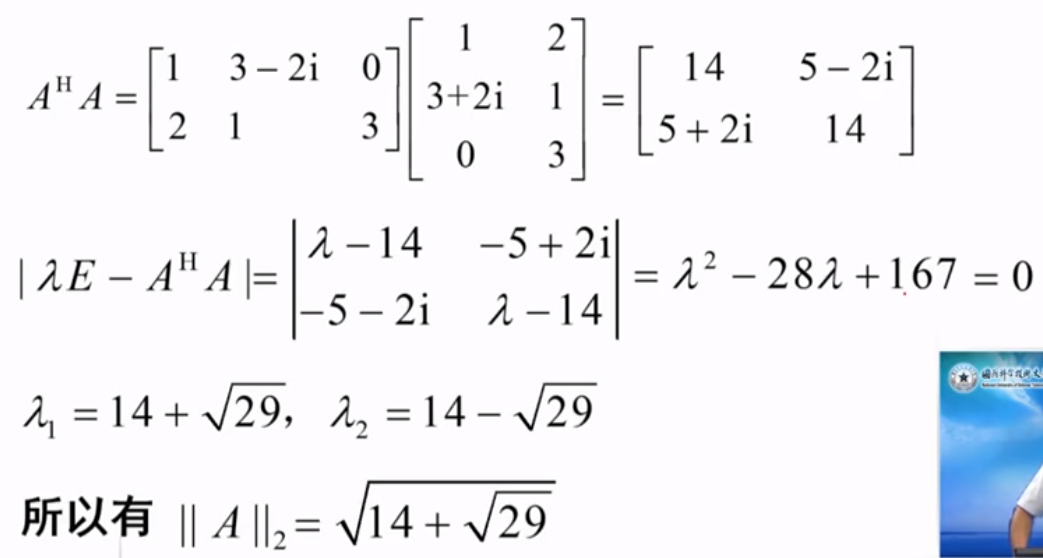
注意是共轭转置,有复数的话,要变符号。
最后
以上就是顺心画板最近收集整理的关于【矩阵论笔记】诱导范数的全部内容,更多相关【矩阵论笔记】诱导范数内容请搜索靠谱客的其他文章。








发表评论 取消回复