本系列博客包括6个专栏,分别为:《自动驾驶技术概览》、《自动驾驶汽车平台技术基础》、《自动驾驶汽车定位技术》、《自动驾驶汽车环境感知》、《自动驾驶汽车决策与控制》、《自动驾驶系统设计及应用》,笔者不是自动驾驶领域的专家,只是一个在探索自动驾驶路上的小白,此系列丛书尚未阅读完,也是边阅读边总结边思考,欢迎各位小伙伴,各位大牛们在评论区给出建议,帮笔者这个小白挑出错误,谢谢!
此专栏是关于《自动驾驶技术概览》书籍的笔记。
3.定位系统之卫星定位技术
概述:
在任何驾驶条件下,自动驾驶车辆均依赖于两种信息:汽车位置和汽车行驶的速度,收集这些信息需要整合多种复杂技术,其中GNSS(Global Navigation Satellite System,全球导航卫星系统)起主要作用;当自动驾驶汽车拥有高精度位置信息后,可以跟高精地图进行匹配,从而提供良好的导航功能;
3.1 卫星导航定位系统介绍
基本介绍:
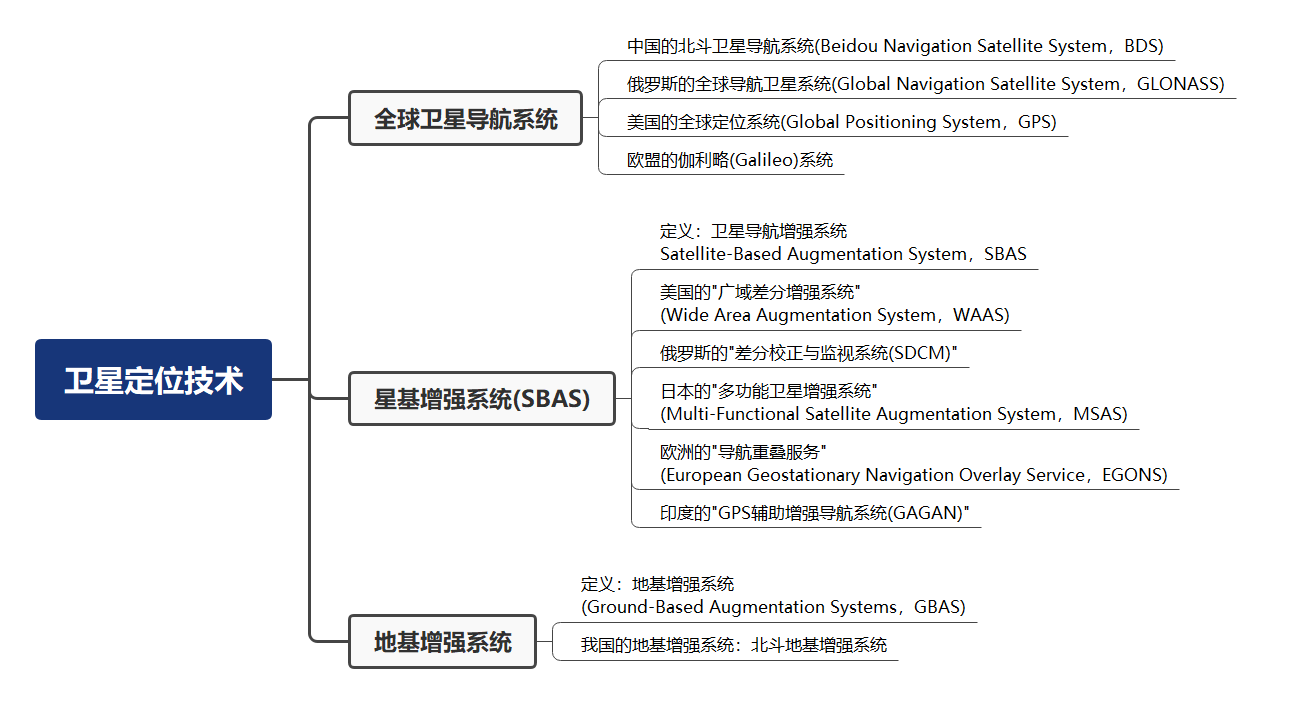
卫星导航定位系统是星基无线电导航系统,以人造地球卫星作为导航台,为全球海陆空的各类军民载体提供全天候的、高精度的位置、速度和时间信息,也被称为天基定位、导航和授时(PNT)系统;卫星导航定位系统除了全球卫星导航系统外,还有星基增强系统、地基增强系统。
3.1.1 全球卫星导航系统
全球卫星导航系统主要包括:美国的全球定位系统(Global Positioning System,GPS)、俄罗斯的全球导航卫星系统(Global Navigation Satellite System,GLONASS)、中国的北斗卫星导航系统(Beidou Navigation Satellite System,BDS)、欧盟的伽利略(Galileo)系统;
- GPS
- GPS由美国国防部建立,能向陆海空3大领域提供实时、全天候和全球性的导航服务,能够满足情报收集、核爆监测、应急通信等军事要求;
- GPS提供具有全球覆盖、全天时、全天候、连续性等优点的三维导航和定位能力;
- GPS由空间卫星部分、地面监控部分、用户接收部分组成;
- 空间卫星部分(空间段)
21颗GPS工作卫星和3颗在轨备用卫星构成完整的21+3形式的GPS卫星工作星座;这种星座构型能满足在地球上任何地点任何时刻均能观测至少4颗几何关系较好的卫星来用于定位; - 地面监控部分(地面段)
由分布在全球的一个主控站、3个注入站和若干个观测站组成; - 用户接收部分(用户段)
接收来自作为基础设施的空间段和地面段提供的导航、定位和授时服务。
- 空间卫星部分(空间段)
- GLONASS
GLONASS能够为海陆空的民用和军用提供全球范围内的实时、全天候三维连续导航、定位和授时服务;GLONASS也由空间段、地面段、用户段组成,21颗为正常工作卫星,3颗为备份卫星; - BDS
- 北斗卫星导航系统是中国正在实施的自主研发、独立运行的全球卫星导航系统,于2012年启动区域性导航定位与授时正式服务,由16颗导航卫星组成的北斗二号系统向我国及大部分亚太地区提供服务;2018年,北斗三号基本系统星座部署完成,开始提供全球范围内的定位与授时服务;
- 北斗卫星导航系统除了提供导航、定位、授时服务,还可以进行短报文通信;
- 北斗系统组成:空间段、地面段、用户段;
- 空间段
由5颗地球静止轨道(Geostationary Orbit,GEO)卫星和30颗非地球静止轨道(Nongeostationary Orbit,NON-GEO)卫星组成;NON-GEO包括中圆地球轨道(MEO)卫星和倾斜地球同步轨道(IGSO)卫星;GEO+NON-GEO+MEO+IGSO星座构型是北斗卫星导航系统的完整布局,这种构型可以保证在地球上任何地点任意时刻均能接收来自4颗以上导航卫星发射的信号,观测条件良好的地区甚至可以接收到10余颗卫星的信号; - 地面段
地面段包括:监测站、上行注入站、主控站; - 用户段
接收来自卫星发射的导航信号,进而获取需要的位置、速度和时间信息。
- 空间段
- Galileo
Galileo系统分为空间段、地面段、用户端3大部分;- 空间段
由分布在3个轨道上的30颗MEO卫星构成,27颗为工作卫星,3颗为备份卫星; - 地面段
由两个地面操控站、29个伽利略传感器达到站及5个S波段上行站和10个C波段上行站组成,传感器达到站及上行站均分布与全球; - 用户段
提供独立于其他卫星导航系统的5种基本服务;
- 空间段
3.1.2 星基增强系统
卫星导航增强系统(Satellite-Based Augmentation System,SBAS);如:美国的"广域差分增强系统(Wide Area Augmentation System,WAAS)"、俄罗斯的"差分校正与监视系统(SDCM)"、日本的"多功能卫星增强系统(Multi-Functional Satellite Augmentation System,MSAS)"、欧洲的"导航重叠服务(European Geostationary Navigation Overlay Service,EGONS)"、印度的"GPS辅助增强导航系统(GAGAN)";
SBAS主要由空间段、地面段、用户段构成;这些区域性广域差分增强服务,可以使得单点的卫星定位更稳定、定位精度更高,从而实现1~3m、1m甚至优于1m的定位服务;
3.1.3 地基增强系统
地基增强系统(Ground-Based Augmentation Systems,GBAS),可以大大提高系统服务性能;GBAS综合使用了各种不同效果的导航增强技术,主要包括:精度增强技术、完好性增强技术、连续性和可用性增强技术,最终实现增强卫星导航服务性能目的;
我国地基增强系统主要是北斗地基增强系统,是国家所有的重要信息基础设施,用于提供北斗卫星导航系统增强定位精度和完好性服务;系统由框架网基准站和加强密度网基准站、通信网络、数据处理系统、运营平台、数据播发系统和用户终端组成,具备在全国范围内为用户提供广域实时米级、分米级、厘米级、后处理毫米级定位精度的能力,具有作用范围广、精度高、野外单机作业等优点;
3.2 卫星导航定位系统工作原理
GNSS定位主要解决两个问题:一是观测瞬间卫星的空间位置,二是测量站点卫星之间的距离;定位是基于坐标系统和时间系统来进行的;
3.2.1 坐标系统和时间系统
卫星导航系统中,坐标系描述与研究卫星在其轨道上的运动、表达地面观测站的位置和处理GPS观测数据;坐标系统分为:地理坐标系、惯性坐标系、地球坐标系、地心坐标系、参心坐标系;常用的坐标系统:WGS-84 坐标系、Parametry Zemli 1990坐标系(PZ-90)、1954年北京坐标系(P54)、1980年国家大地坐标系(C80)、2000国家大地坐标系(CGCS2000);
时间系统:
- 首先,卫星发送的所有信号都由高精度的原子钟控制的;
- 其次,大多数卫星导航系统实际上是通过精确测定信号传播时间来实现距离测量的;
- 时间系统可分为世界时、力学时、原子时、儒略日、卫星导航时间系统等;
- GPS系统采用了一个独立的时间系统作为导航定位计算的依据,称为GPS时间系统(GPST);
- GPS时间属于原子时系统,其秒长与原子时秒长相同;
3.2.2 定位原理
GNSS定位系统利用基本三角定位原理,GNSS接收装置通过测量无线电信号的传输时间来测量距离;由每颗卫星的所在位置和测量得到的每颗卫星与接收装置的距离,可以算出接收器所在位置的三维坐标值;使用者至少需要收到3颗卫星的信号才可确定自身位置;实际使用中GNSS接收装置是利用4个以上的卫星信号来确定使用者所在位置及高度;
以3个卫星的位置为圆心,3个卫星距地面某点距离为半径作为球面,则球面交点即为地面用户位置,如下:
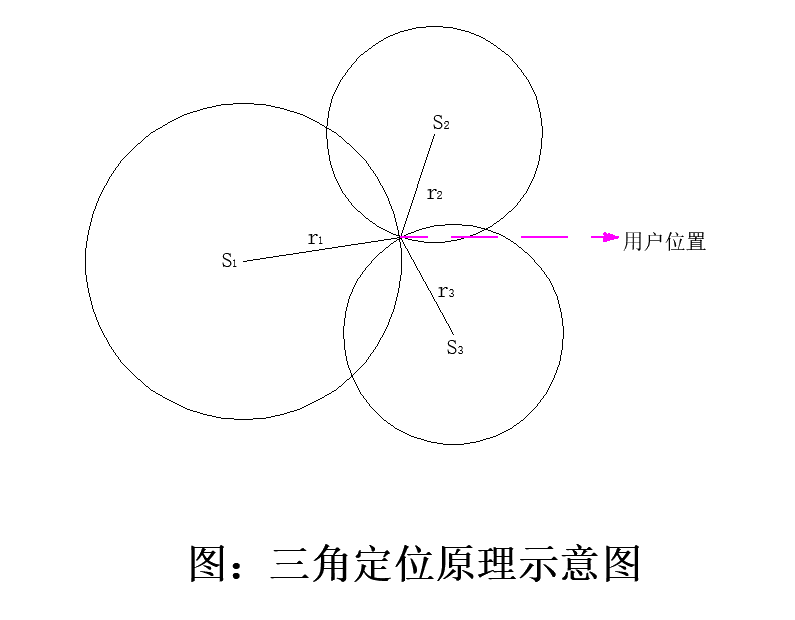
注:由于GNSS采用单程测距,难以保证卫星时钟与用户接收机时钟的严格同步,观测站和卫星之间的距离均受两种时钟不同步的影响;卫星钟差可用导航电文中所给的有关钟差参数进行修正,接收机的钟差难以精准确定;通常采用的优化策略:把接收机钟差作为一个未知参数,与观测站的坐标一并求解,即在1个观测站上一般需要求解4个未知参数(3个点位坐标分量和1个钟差参数),故至少需要4个同步伪距观测值,即需要同时观测4颗卫星。
定位方法分类:
- 依据用户站的运动状态,分为:静态定位和动态定位;
- 静态定位:指待定点的位置固定不动,将GPS接收机安置于其上进行大量的重复观测;
- 动态定位:指待定点处于运动状态,测定待定点在各观测时刻运动中的点位坐标,及运动载体的状态参数,如:速度、时间和方位等;
- 按照定位的模式分为:绝对定位和相对定位;
- 绝对定位:指只采用一台GPS接收机进行定位,所确定的是接收机天线在WGS84坐标系统中的绝对位置;
- 相对定位:指两台GPS接收机安置于两个固定不变的待定点上,或一个点固定于已知点上,另一个为流动待定点;同步观测一定时间后,可以确定两个点之间的相对位置,获得高精度的点位坐标;
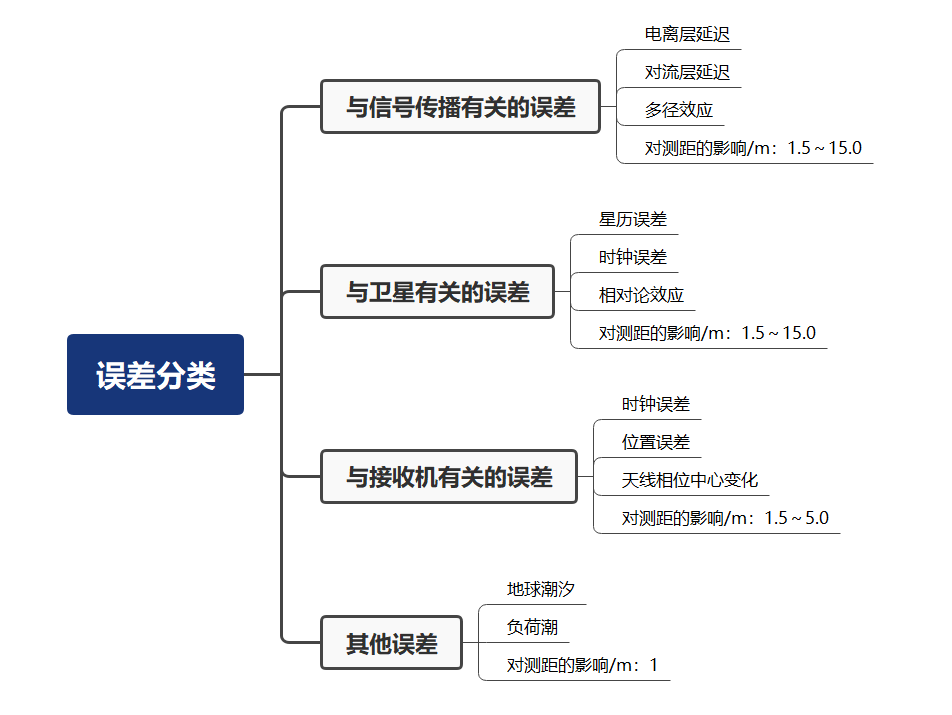
3.2.3 误差分析
- 与信号传播有关的误差;
- 与卫星有关的误差;
- 与接收机有关的误差;
- 地球潮汐、负荷潮等造成的其他误差;
3.3 小结
最后
以上就是善良信封最近收集整理的关于学习笔记17--定位系统之卫星定位技术的全部内容,更多相关学习笔记17--定位系统之卫星定位技术内容请搜索靠谱客的其他文章。








发表评论 取消回复