终于快把目标跟踪写完了,目标跟踪相对检测还是挺复杂的。今天把目标跟踪的最后一篇算法写完,DeepTracking目标跟踪算法,该算法也是深度学习跟踪算法比较难的一种算法。
1.什么是DeepTracking目标跟踪算法
DeepTracking目标跟踪算法不同于上一篇讲的RTT用RNN目标跟踪算法,RTT主要拿RNN来做序列关联,而DeepTracking则主要拿RNN来做序列关联的建模,从而实现了端到端的跟踪算法。
2.DeepTracking目标跟踪算法原理
DeepTracking目标跟踪算法主要步骤如下:
(1)引入了一个具有马尔可夫性质的隐变量 ht 。
(2)假设 Bt 为关于 ht 的信念(belief),对应于后验概率:Bel(ht) = P(yt|ht) 。
(3)运用经典贝叶斯跟踪框架时序更新进行转化。
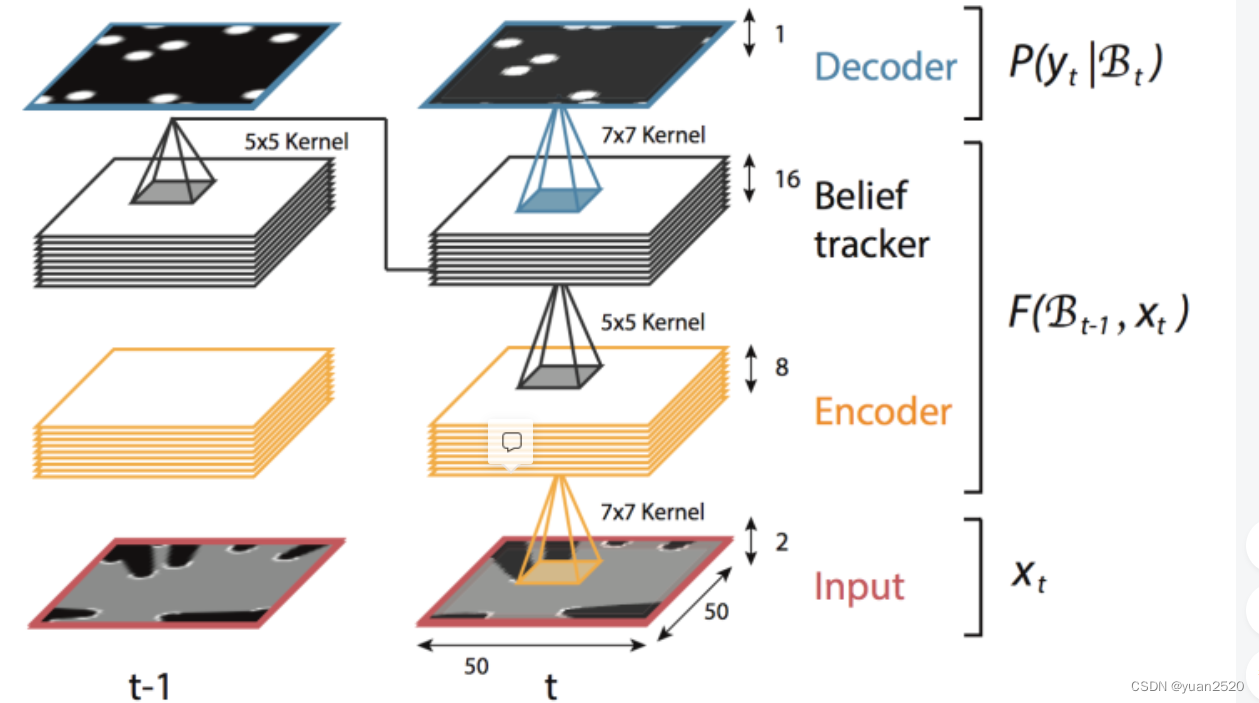
可以用公式表示为:Bt = F(Bt-1,xt)和 P(ty|x1:t) = P(yt|Bt)。
其算法框架可以表示为:
3.DeepTracking目标跟踪算法优缺点
优点: 结合了对RNN和贝叶斯框架融合的建模上;实现了端到端。
缺点:在实际场景运用起来比较复杂,需要长时间的调试。
最后
以上就是开心大地最近收集整理的关于无人驾驶感知篇之目标跟踪(十八)的全部内容,更多相关无人驾驶感知篇之目标跟踪(十八)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复