客观题
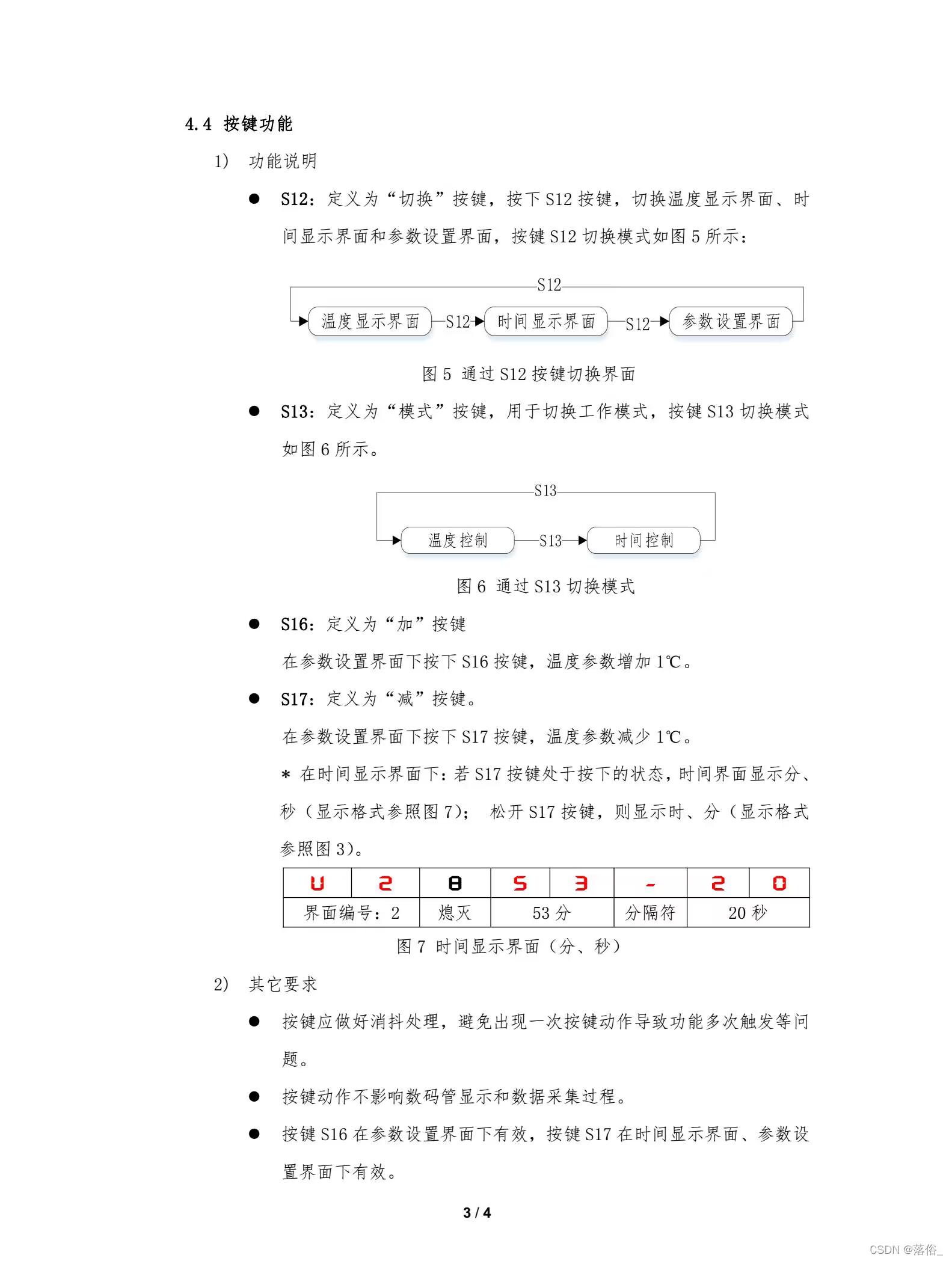
第十三届省赛客观题
讲解
通过查找芯片手册得知IAP15F2K61S2单片机的外设中能够作为UART1的波特率发生器的有定时器1、定时器2。
压电效应就是指:某些电介质在沿一定方向上受到外力的作用而变形时,其内部会产生极化现象,同时在它的两个相对表面上出现正负相反的电荷。当外力去掉后,它又会恢复到不带电的状态,这种现象称为正压电效应。
光电效应是物理学中一个重要而神奇的现象,在光的照射下,某些物质内部的电子会被光子激发出来而 形成电流,即光生电。
热电效应是当受热物体中的电子(空穴),因随着温度梯度由高温区往低温区移动时,所产生电流或电荷堆积的一种现象。
霍尔效应: 当电流垂直于外磁场通过半导体时,载流子发生偏转,垂直于电流和磁场的方向会产生一附加电场,从而在半导体的两端产生电势差,这一现象就是霍尔效应。
三态门:是指逻辑门的输出除有高、低电平两种状态外,还有第三种状态——高阻状态的门电路,高阻态相当于隔断状态。三态门都有一个EN控制使能端,来控制门电路的通断。
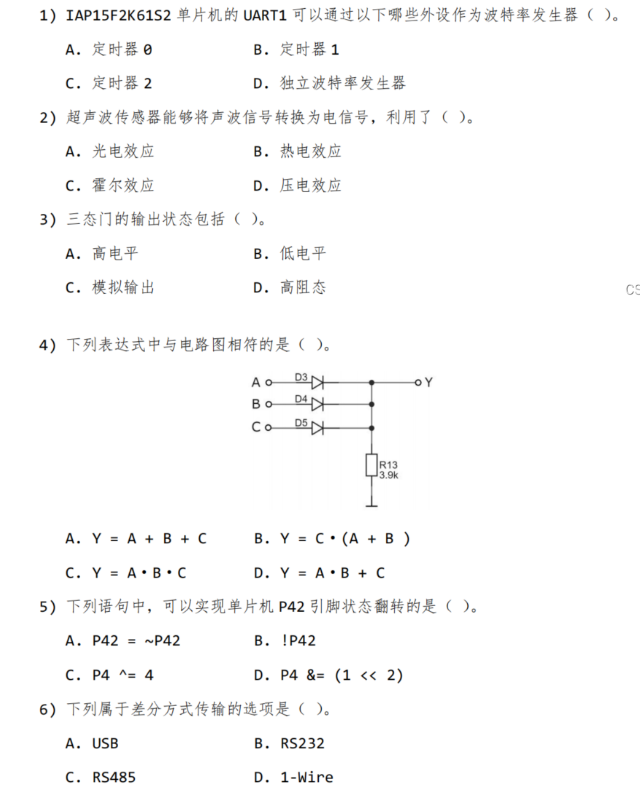
从电流的流向来看,很显然A、B、C点的电流都是流向Y。因此,我们就能够推出Y=A+B+C。
A选项是常用的状态翻转的方法。B选项,我们是不是可以看成P42==0呢?C选项可以转换为P4 = P4^0x100;在异或运算中同1或者同0则是0,否则就是1;因此,C选项就是正确的。D选项可以转换为P4=P4&0x100,一个数与上1结果就是它本身。
差分传输是一种信号传输的技术,区别于传统的一根信号线一根地线的做法,差分传输在这两根线上都传输信号,这两个信号的振幅相同,相位相反。在这两根线上的传输的信号就是差分信号。信号接收端比较这两个电压的差值来判断发送端发送的逻辑状态。在电路板上,差分走线必须是等长、等宽、紧密靠近、且在同一层面的两根线。RS232的传输方式是异步传输;而单总线协议1-wrie,只使用一根数据线,很显然不是正确答案。
data:访问可直接寻址的片内存储器,即内部RAM,即我们常说的DATA区或数据段,在整个RAM块中只占前128字节(Ox00~Ox7f),因为它采用直接寻址方式,对变量访问最快,通常我们把使用比较频繁的变量或局部变量存储在DATA段中,但是它的空间有限(128)。
idata:使用寄存器作为指针来进行间接寻址,一般常用来存放比较频繁的变量。
xdata:访问外部数据存储器,即外部RAM,大小64K(Ox0000~Oxiff),16位地址寻址,称作外部数据区简称XDATA 区,访问XDATA须采用间接寻址。
pdata:访问当前页面内的外部RAM中的XDATA,按页访问,每一页256字节。PDATA段只有256个字节,对PDATA和XDATA的操作是相似的,但是对PDATA段寻址比对XDATA段寻址要快,因为对PDATA段寻址只需要装入8位地址,而对XDATA段寻址需装入16位地址,所以尽量把外部数据存储在PDATA段中。
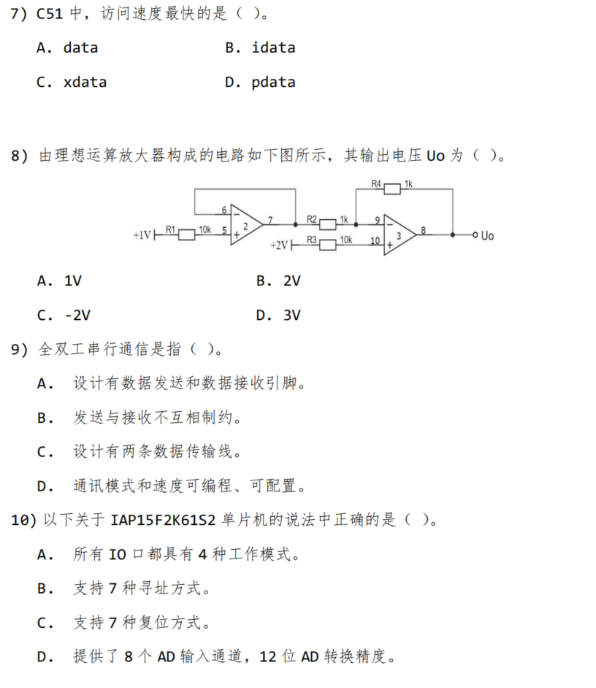
掌握好虚短与续断就能够很好的解除该题的答案了。虚短:理解成短路,运放处于线性状态时,把两输入端视为等电位,即运放正输入端和负输入端的电压相等;虚断:理解成断路,运放处于线性状态时,把两输入端视为开路,即流入正负输入端的电流为零;总结一句话:虚短用来得到电压相等;虚断用来得到电流为0。
全双工通信又称为双向同时通信,即通信的双方可以同时发送和接收信息的信息交互方式。它要求发射设备与接收设备有独立的接收与发射的能力即可。
maim函数
#include <STC15F2K60S2.H>
#include <intrins.h>
#include "ds1302.h"
#include "onewire.h"
#define uc unsigned char
#define ui unsigned int
sbit H1=P3^0;
sbit H2=P3^1;
sbit H3=P3^2;
sbit H4=P3^3;
sbit L1=P3^4;
sbit L2=P3^5;
sbit L3=P4^2;
sbit L4=P4^4;
uc tac[7]={0x50,0x59,0x23,0x16,0x03,0x04,0x23};//秒 分 时 日 月 星期 年
#define COM(X) {P0 = X; P2 = (P2 & 0x1F | 0xC0); P2 &= 0x1F;}
#define SEG(X) {P0 = X; P2 = (P2 & 0x1F | 0xE0); P2 &= 0x1F;}
#define BUZ(X) {P0 = X; P2 = (P2 & 0x1F | 0xA0); P2 &= 0x1F;}
#define LED(X) {P0 = X; P2 = (P2 & 0x1F | 0x80); P2 &= 0x1F;}
uc code tab[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xc6,0x8e,0x8C,0xC1,0x86,0xbf,0x88};//0-9,C,F,P,U,E,-
//10-C
//11-F
//12-P
//13-U
//14-E
//15--
uc jm=0;
xdata ui temp;
xdata ui count;
uc m=1;
uc wd_kz=26;
uc zt;
//函数的申明
void jm_xs();
uc GetButtonValue_1(void);
/****************led,继电器,蜂鸣器的共用体*************************/
typedef union{
uc led_data;
struct{
uc led1:1;
uc led2:1;
uc led3:1;
uc led4:1;
uc led5:1;
uc led6:1;
uc led7:1;
uc led8:1;
}led_one;
}led_tow;
static xdata led_tow s_led;
typedef union{
uc other_data;
struct{
uc other1:4;
uc other_jdq:1;
uc other2:1;
uc other_fmq:1;
}other_one;
}other_tow;
static xdata other_tow s_other;
/****************led灯独立控制**************/
void led_dlkz(uc led_x,uc no_of)
{
switch(led_x)
{
case 1:s_led.led_one.led1=(no_of==1)?1:0;break;
case 2:s_led.led_one.led2=(no_of==1)?1:0;break;
case 3:s_led.led_one.led3=(no_of==1)?1:0;break;
case 4:s_led.led_one.led4=(no_of==1)?1:0;break;
case 5:s_led.led_one.led5=(no_of==1)?1:0;break;
case 6:s_led.led_one.led6=(no_of==1)?1:0;break;
case 7:s_led.led_one.led7=(no_of==1)?1:0;break;
case 8:s_led.led_one.led8=(no_of==1)?1:0;break;
}
LED(s_led.led_data);
}
/***************继电器开关控制**********************/
void jdq(uc no_of)
{
s_other.other_one.other_jdq=(no_of==1)?1:0;
BUZ(s_other.other_data);
}
/*****************蜂鸣器开关控制*****************/
void fmq(uc no_of)
{
s_other.other_one.other_fmq=(no_of==1)?1:0;
BUZ(s_other.other_data);
}
/******************************LED灯闪烁函数******************************/
void Timer0Init(void) //500微秒@12.000MHz
{
AUXR |= 0x80; //定时器时钟1T模式
TMOD &= 0xF0; //设置定时器模式
TL0 = 0x90; //设置定时初值
TH0 = 0xE8; //设置定时初值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
EA = 1;
ET0 = 1;
}
void tim0()interrupt 1
{
count++;
if(count==100)
{m++;
if(m>2)
{ m=1; }
count=0;
}
}
void LED_SS()
{
switch(m)
{
case 1:led_dlkz(3,0);break;
case 2:led_dlkz(3,1);break;
}
}
/*************************工作指示灯函数***********************************/
void LED_ZS()
{
if(zt==0)
{led_dlkz(2,0);}
else
{led_dlkz(2,1);}
}
/***************延时函数区*************/
void Delay100us() //用于数码管显示
{
unsigned char i, j;
i = 2;
j = 39;
do
{
while (--j);
} while (--i);
}
void Delay750ms() //用于消除开机85C
{
unsigned char i, j, k;
_nop_();
_nop_();
i = 35;
j = 51;
k = 182;
do
{
do
{
while (--k);
} while (--j);
} while (--i);
}
void Delay1ms() //用于按键消抖
{
unsigned char i, j;
i = 12;
j = 169;
do
{
while (--j);
} while (--i);
}
/***************数码管显示函数******************/
void OutputSMG(uc gqb,uc yxl)
{
uc i;
for(i=0;i<8;i++)
{
SEG(0xff);
COM(0x01<<gqb);
SEG(yxl);
Delay100us();
}
COM(0x00);
SEG(0x00);
}
/*********************************时钟显示分秒函数************************/
void smg_FM()
{
uc F,M;
readtime(tac);
F=(tac[1]>>4)*10+(tac[1]&0X0F);
M=(tac[0]>>4)*10+(tac[0]&0X0F);
OutputSMG(0,tab[13]);
OutputSMG(1,tab[2]);
OutputSMG(3,tab[F/10]);
OutputSMG(4,tab[F%10]);
OutputSMG(5,tab[15]);//-
OutputSMG(6,tab[M/10]);
OutputSMG(7,tab[M%10]);
if(F==0&&zt==1&&M==0)
{jdq(1);led_dlkz(1,0); }
if(F==0&&zt==1&&M==5)
{jdq(0);led_dlkz(1,1);}
if(F==0&&zt==1&&0<=M<5)
{TR0=1;LED_SS();}
if(F==0&&zt==1&&M>=5)
{TR0=0;led_dlkz(3,1);}
}
/*********************************时钟显示时分函数************************/
void smg_SF()
{
uc S,F,M;
readtime(tac);
M=(tac[0]>>4)*10+(tac[0]&0X0F);
S=(tac[2]>>4)*10+(tac[2]&0X0F);
F=(tac[1]>>4)*10+(tac[1]&0X0F);
OutputSMG(0,tab[13]);
OutputSMG(1,tab[2]);
OutputSMG(3,tab[S/10]);
OutputSMG(4,tab[S%10]);
OutputSMG(5,tab[15]);//-
OutputSMG(6,tab[F/10]);
OutputSMG(7,tab[F%10]);
if(F==0&&zt==1&&M==0)
{jdq(1);led_dlkz(1,0); }
if(F==0&&zt==1&&M==5)
{jdq(0);led_dlkz(1,1);}
if(F==0&&zt==1&&0<=M<5)
{TR0=1;LED_SS();}
if(F==0&&zt==1&&M>=5)
{TR0=0;led_dlkz(3,1);}
}
/*********************************时钟功能选择函数************************/
void sz_xz()
{
uc t;
t=GetButtonValue_1();
switch(t)
{
case 1:smg_SF();break;
case 2:smg_FM();break;
}
}
/******************************温度参数数码管显示函数******************************/
void smg_wd1()
{
OutputSMG(0,tab[13]);
OutputSMG(1,tab[3]);
OutputSMG(6,(tab[wd_kz/10]));
OutputSMG(7,tab[wd_kz%10]);
}
/******************************温度数码管显示函数******************************/
void smg_wd()
{
ui temp;
temp=rd_temperature();
temp=temp*0.625;
OutputSMG(0,tab[13]);
OutputSMG(1,tab[1]);
OutputSMG(5,tab[temp/100]);
OutputSMG(6,(tab[temp/10%10]&0x7f));
OutputSMG(7,tab[temp%10]);
if(temp>(wd_kz*10)&&zt==0)
{TR0=1;jdq(1);LED_SS();}
else
{TR0=0;jdq(0);led_dlkz(3,1);}
}
/**********************按键函数****************/
uc GetButtonValue_1(void)
{
H3=0;
H2=H1=H4=1;
L1=L2=L3=L4=1;
if(L1==0&&zt==1)
{Delay1ms();return 1;while(L1==0);}//s17 切换时秒显示
return 2;
}
void keycan()
{
H3=0;
H2=H1=H4=1;
L1=L2=L3=L4=1;
if(L1==0&&zt==0)
{Delay1ms();wd_kz--;while(L1==0){jm_xs();} }//s17 温度参数减
H4=0;
H1=H3=H2=1;
L1=L2=L3=L4=1;
if(L2==0)
{Delay1ms();jm++;if(jm>2){jm=0;}while(L2==0);}//s12 界面切换
H3=0;
H1=H2=H4=1;
L1=L2=L3=L4=1;
if(L2==0)
{Delay1ms();zt++;if(zt>1){zt=0;}while(L2==0){jm_xs();}}//s13 温度/时钟控制
H4=0;
H2=H1=H3=1;
L1=L2=L3=L4=1;
if(L1==0&&zt==0)
{Delay1ms(); wd_kz++;while(L1==0){jm_xs();}}//s16 温度参数加
}
/*********开机消除85显示**********/
void ds18b20_xxx()
{
rd_temperature();
Delay750ms();
}
/********界面切换函数*************/
void jm_xs()
{
switch(jm)
{
case 0:smg_wd(); break;
case 1:sz_xz(); break;
case 2:smg_wd1();break;
}
}
/****************初始化函数**********/
void csh_system()
{
LED(0xff);//LED灯全关闭
fmq(0);//关闭蜂鸣器
jdq(0);//关闭继电器
}
void main()
{
ds18b20_xxx();
savetime(tac); //时钟初始化
Timer0Init();
csh_system();
while(1)
{
GetButtonValue_1();
keycan();
LED_ZS();
jm_xs();
}
}ds18B20.c
#include "STC15F2K60S2.H"
#include "onewire.h"
sbit DQ = P1^4;
单总线延时函数
void Delay_OneWire(unsigned int t)
{
unsigned char i;
while(t--){
for(i=0;i<12;i++);
}
}
void Delay_us(void)
{
unsigned char i;
i = 30;
while (--i);
}
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
// unsigned char index = 0;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
Delay_us();
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20初始化
bit init_ds18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80); // 延时大于480us
DQ = 1;
Delay_OneWire(10); // 14
initflag = DQ; // initflag等于1初始化失败
Delay_OneWire(5);
return initflag;
}
//缺失自己写
//DS18B20温度采集程序:整数
unsigned int rd_temperature()
{
// unsigned int temp;
unsigned char L,H;
init_ds18b20();
Write_DS18B20(0xcc);//跳过ROM指令
Write_DS18B20(0x44);//转换温度指令
Delay_OneWire(80); // 延时大于480us
init_ds18b20();
Write_DS18B20(0xcc);//跳过ROM指令
Write_DS18B20(0xbe);//读温度指令
L = Read_DS18B20();
H = Read_DS18B20();
// temp = H<<4;
// temp|=(L>>4);
return (H<<8)+L;
}
ds18b20.h
#ifndef _ONEWIRE_H
#define _ONEWIRE_H
//函数声明 全部声明
void Delay_OneWire();
void Delay_us();
void Write_DS18B20();
unsigned char Read_DS18B20();
bit init_ds18b20();
unsigned int rd_temperature();
#endifds1302.c
/*
程序说明: DS1302驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台 8051,12MHz
日 期: 2011-8-9
*/
#include <STC15F2K60S2.H>
#include <intrins.h>
sbit SCK=P1^7;
sbit SDA=P2^3;
sbit RST = P1^3; // DS1302复位
void Write_Ds1302(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void Write_Ds1302_Byte( unsigned char address,unsigned char dat )
{
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
Write_Ds1302(dat);
RST=0;
}
unsigned char Read_Ds1302_Byte ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0; _nop_();
SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0; _nop_();
SCK=0; _nop_();
SCK=1; _nop_();
SDA=0; _nop_();
SDA=1; _nop_();
return (temp);
}
void readtime(unsigned char *time)
{
unsigned char i=0;
unsigned char dat=0x81;
for (i=0;i<7;i++)
{
*(time+i)=Read_Ds1302_Byte (dat); //i对应的是偏移量
dat=dat+2;
}
}
void savetime(unsigned char *Time)
{
unsigned char i=0;
unsigned char dat=0x80;
Write_Ds1302_Byte(0x8e,0x00);//禁止写保护
for (i=0;i<7;i++)
{
Write_Ds1302_Byte( dat, *(Time+i) );
dat=dat+2;
}
Write_Ds1302_Byte(0x8e,0x80);//启用写保护
}ds1302.h
#ifndef __DS1302_H
#define __DS1302_H
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte( unsigned char address );
void readtime(unsigned char *time);
void savetime(unsigned char *Time);
#endif代码效果
二维码形式

最后
以上就是单身小刺猬最近收集整理的关于13届蓝桥杯单片机省赛(第一场(客观题+代码))的全部内容,更多相关13届蓝桥杯单片机省赛(第一场(客观题+代码))内容请搜索靠谱客的其他文章。








发表评论 取消回复