单应性变换
单应性矩阵估计
小结
单应性变换
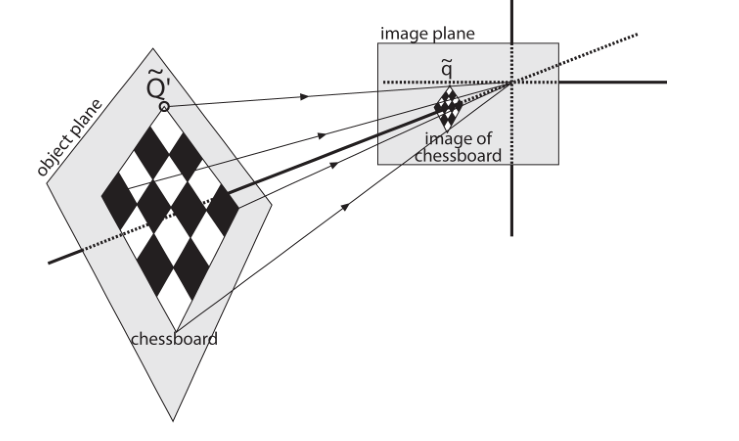
在讲解相机标定之前,先引入一个新的概念:单应性变换,用来描述物体在两个平面上或者两个坐标系之间的坐标映射关系,对应的变换矩阵称为单应性矩阵。根据相机成像模型,有:
令
, 则有:
其中.
在实际应用中,为了简化计算,选取世界坐标系使得,设
, 则单应性矩阵定义为:
可以看出,单应性矩阵同时包含了
最后
以上就是稳重蜜蜂最近收集整理的关于计算单应性矩阵 python_单应性变换的全部内容,更多相关计算单应性矩阵内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复