该系统主要用于对静态物体的高精度三维坐标测量,测量时只需要手持相机距离被测物体一定距离从多个位置和角度拍摄一定数量的数字像片,然后由计算机软件自动处理(标志点图像中心自动定位、自动匹配、自动拼接和自动平差计算)得到特征标志点的X、Y、Z坐标。
该系统的测量过程可以概括如下:
(1) 粘贴标志点:在待测工件上粘贴标志点;
(2) 拍摄像片:手持相机,从不同位置和角度对工件表面的标志点进行摄影;
(3)图像处理:标志点图像特征的自动提取与标志中心的自动定位;
(4) 坐标计算:对像点进行自动匹配、自动拼接和光束法平差计算,解算相机位置、姿态以及标志点的三维坐标;
特征点拍照测量系统可以轻松完成大型物面的测量。该系统可以将全局测量误差控制在0.02mm/m以内,可用于大型物体的关键点坐标精确测量,还可用于孔位、棱角的检测等。
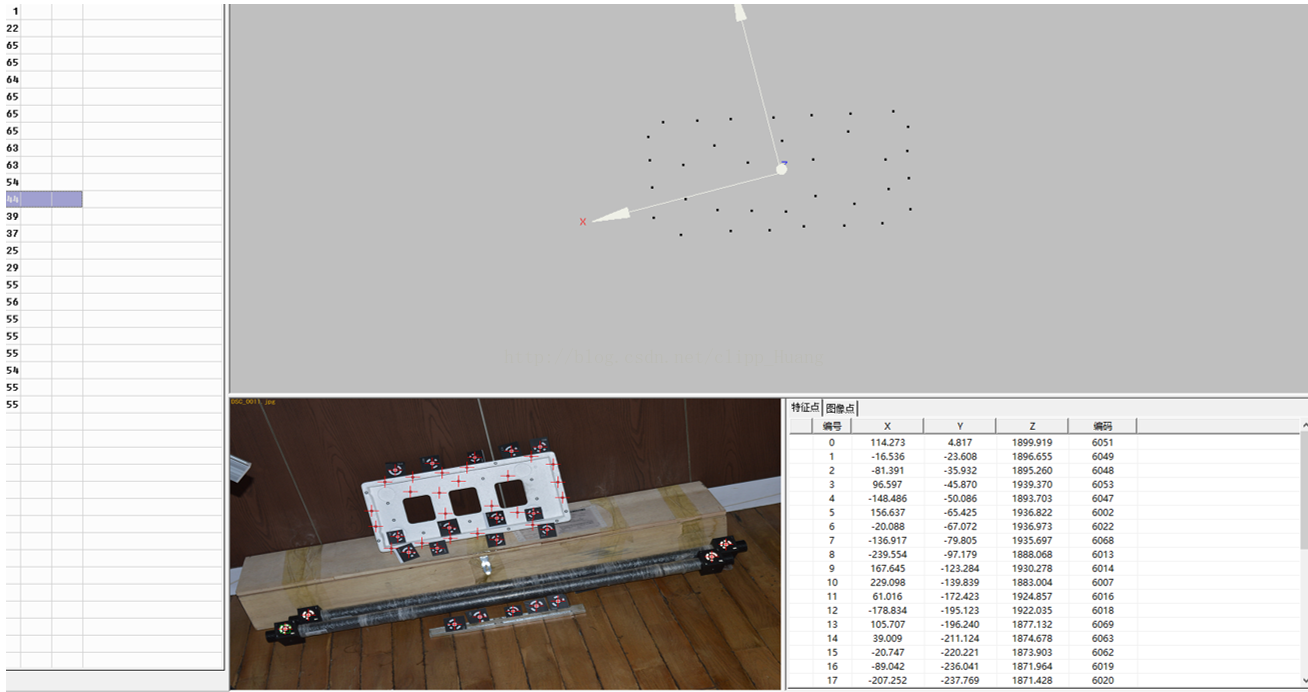
图-1

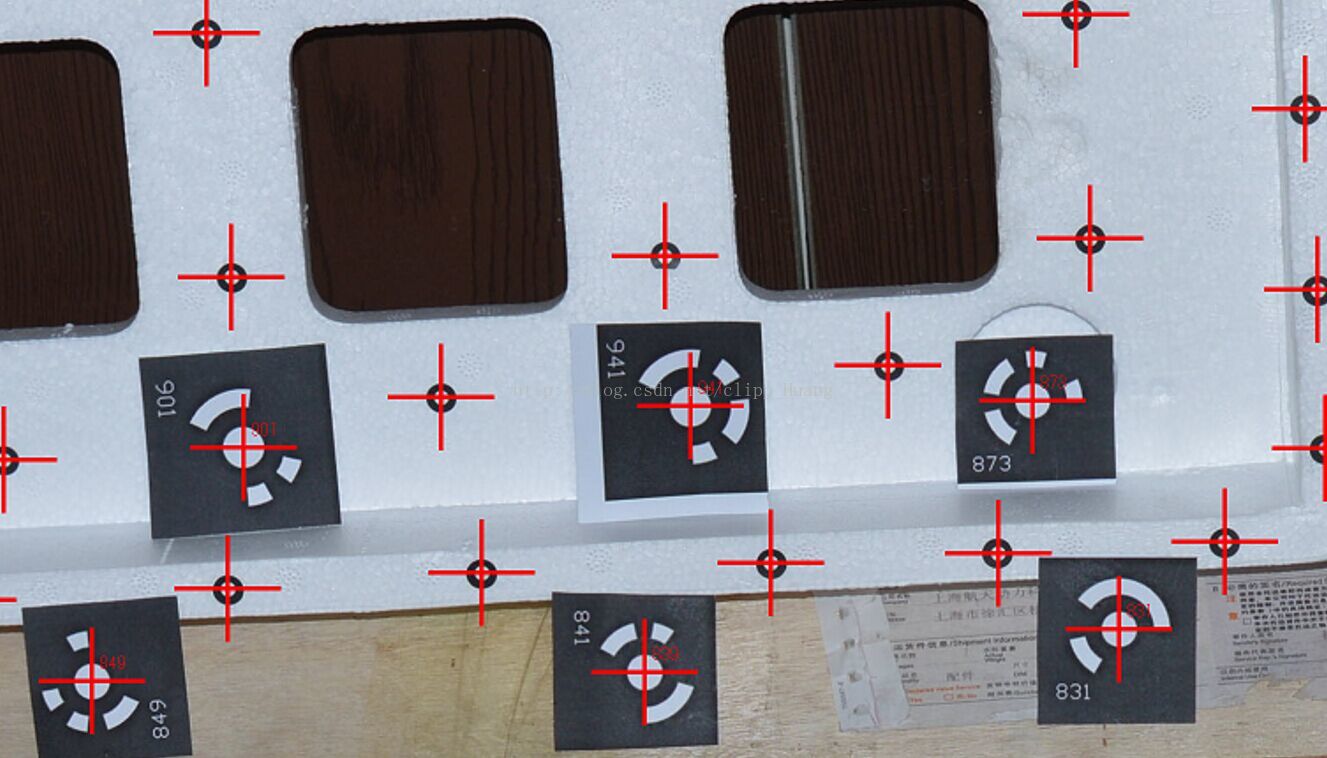
图-2
三维重建的效果如图-1所示,这里选的是一个比较小的物体方便测试,实际上可以测量像汽车那么大的物体,主要的作用还是配合三维扫描的,因为重建处理的全局三维点可以作为拼接的三维特征点来用,这样在三维扫描的时候就不需要一幅一幅的去拼接了。里面的主要技术包括了编码标记点的检测、相机的自标定、三维定向和重建、以及光束法平差优化,这些我会在后续博客里面进行介绍。
交流QQ:1264768501
最后
以上就是无情学姐最近收集整理的关于摄影测量系统的全部内容,更多相关摄影测量系统内容请搜索靠谱客的其他文章。








发表评论 取消回复