文章目录
- 模块介绍
- 波特率定义
- 主要代码描述
- 代码实例
模块介绍
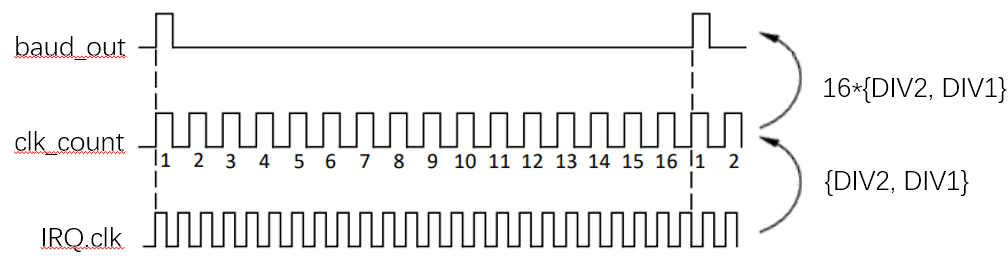
该组件模块只要功能是检测特定波特率下的时钟分频是否正确,主要指IRQ.CLK在寄存器的控制下,是否正确分频成baud_out,其中 DIV2与 DIV2 寄存器的值和各个波形之间的频率关系如下图所示:通过验证在相邻两个 brg_en 时钟的上升沿之间有 16*{DIV2, DIV1}个 IRO.CLK 时钟的上升沿,可以说明寄存器 的功能是正确的。{DIV2, DIV1}指的是在特定波特率下时钟的周期数。
波特率定义
波特率既1s发送的数据位数。一般选择的波特率有,9600,19200,115200等。通过波特率可以计算出时钟在指定波特率条件下发送1bits数据所需要的时间以及计数次数。下面以50M时钟频率,波特率9600为例计算。
对于50M时钟,其周期为1/50 *106, 则1s的时间内,时钟会产生50 *106个上升沿,即计数50000000次。那么对于这个时钟,计数一次需要1/50 * 106 s的时间。
同样,在波特率9600控制下,传输1bit数据需要1/9600 s的时间,在这个时间内时钟计数的次数则为1/9600 * 50 * 106次,即5208次。
主要代码描述
该组件中使用了三个 task:monitor_apb()、count_clocks()和 monitor_baudout()。
任务monitor_apb()用来监测DIV1 或 DIV2寄存器是否被写入新值,当DIV1或DIV2寄存器被写入以后,计数器会清零重启。
任务 count_clocks则是用来记录 IRQ.clk上升沿的个数,每当一个上升沿来临时, 其内部的 clk_count 就自增 1。
任务monitor_baudout()则用来比对结果,内部的两个变量分别用来存储在 baud_out前后两个上升沿时采样的 clk_count 数值,取差值后与{DIV2, DIV1}进行比对, 从而得出检测结果。
代码实例
task baud_rate_checker::count_clocks();
forever begin
@(posedge IRQ.CLK);
clk_count++;
end
endtask: count_clocks
function void baud_rate_checker::check_count(bit[15:0] div, int clk_count);
if(clk_count != div) begin
`uvm_error("check_count", $sformatf("Baudrate divisor error - Divisor:%0d Clock interval:%0d", div, clk_count))
div_errors++;
end
else begin
baud_rate_cg.sample(div);
end
endfunction: check_count
task baud_rate_checker::monitor_baudout();//比对结果
forever begin
@(posedge IRQ.baud_out);
if((new_value_written == 0) && (br_value_invalid == 0)) begin
div1 = rm.DIV1.DIV.get_mirrored_value();//读取寄存器中的mirrored值
div2 = rm.DIV2.DIV.get_mirrored_value();
div = {div2[7:0], div1[7:0]};
check_count(div, clk_count);//将寄存器中读到的div1和div2的值与clk_count进行对比
end
new_value_written = 0;
clk_count = 0;//重启计数器
end
endtask: monitor_baudout
task baud_rate_checker::monitor_apb();
apb_seq_item apb;
forever begin
apb_fifo.get(apb);
if(apb.we == 1) begin
case(apb.addr[7:0])
8'h1c: begin
new_value_written = 1;
br_value_invalid = 0;
end
8'h20: br_value_invalid = 1;
endcase
end
end
endtask: monitor_apb
最后
以上就是负责导师最近收集整理的关于波特率分频监测模块理解-基于apb_uart项目的全部内容,更多相关波特率分频监测模块理解-基于apb_uart项目内容请搜索靠谱客的其他文章。








发表评论 取消回复