文章目录
- OTTO机器人是什么
- 元件准备
- 组装
- 躯体部位鸵机的安装
- 双腿安装到躯体上
- 腿部鸵机的安装
- 双脚安装到腿部
- 头部的组装
- 线路连接
- 合上头部
- 代码上传
- 效果演示
OTTO机器人是什么
OTTO是完全开源的,任何人都可以做的交互式机器人. 她与Arduino控制系统兼容,其主要外观材料可以直接3d打印而来, 甚至可以说她是为培养孩子们学习机器人的热情而建造的。 OTTO的灵感来源于另一个称为Zowi的两足机器人。
元件准备
| 图片参考 | 项目 | 数量 | 购买渠道 |
|---|---|---|---|
 | Arduino or Genuino Nano V3.0 ATmega328 | 1 | Dfrobot |
 | Arduino Nano扩展板 | 1 | Dfrobot |
 | HC-SR04超声波传感器 | 1 | Dfrobot |
 | 5v无源蜂鸣器 | 4 | [Dfrobot] |
 | 母对母杜邦线 | 6 | Dfrobot |
| 5号AA电池 | 4 | Dfrobot |
| 两枚装5号电池的电池盒 | 2 | Dfrobot |
 | OTTO的外观3D打印一套 | 1 | Dfrobot |
OTTO外观打印机的说明:你可以从这里下载3d打印机的源文件自行打印,也可以找3d打印商进行打印机购买.如果自行打印,其打印设置要求:精度-0.15mm, 填充密度-20%
组装
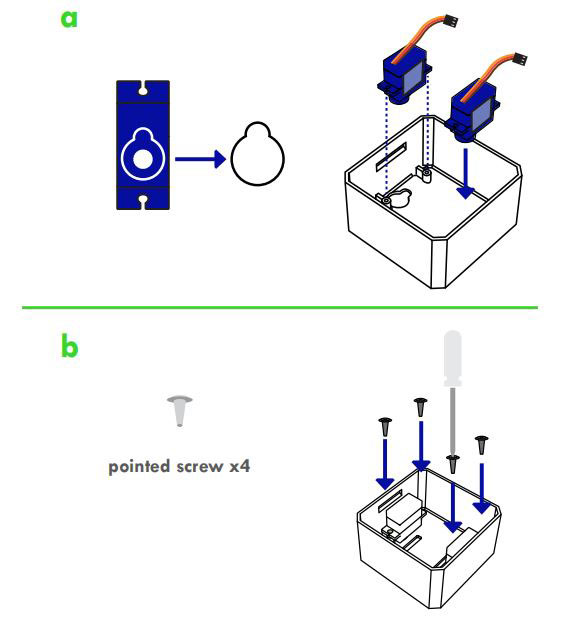
躯体部位鸵机的安装
拿来两个鸵机,按照图中所示,把他们安装到指定的位置,用螺丝刀固定好
双腿安装到躯体上
先把双腿部件连接到身体上微型鸵机处,要确保腿部相对于身体能够向左右两边各自转动90度。在对齐腿部之后用螺丝刀通过腿内部的小孔固定好.此处需注意将腿部顶端上的穿线孔与躯体下方的穿线孔靠近,使得稍后可以流畅穿线
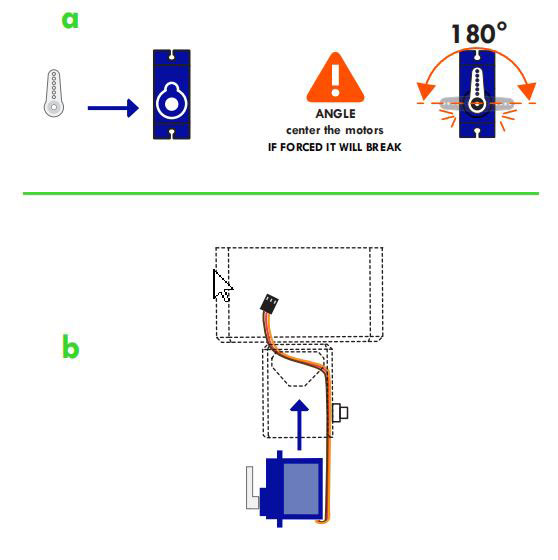
腿部鸵机的安装
把微型鸵机放到腿部,可以把鸵机线绕几圈,然后如图示把它推进内部,并将鸵机的引线从躯体穿线孔穿出 如果困难的话,也许需要用刀清洁一下相关的区域。像检查腿部的活动方向一样,你也看下鸵机至少可以朝左右两边各旋转90度。检查后要使用小螺丝来固定它,同样地,另一只脚也是同样的步骤

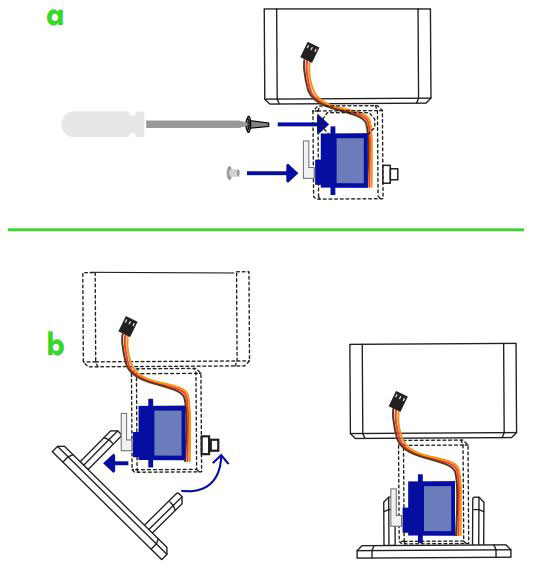
双脚安装到腿部
按照图示的方式来安装,但要注意把电线放置到躯体内部的槽位并通过腿部的小孔穿出来。一旦确定好他们的位置,就可以用螺丝刀从背后固定好她们。
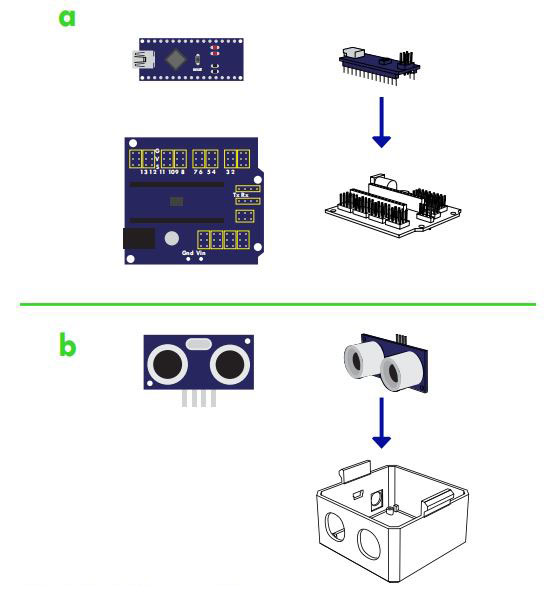
头部的组装
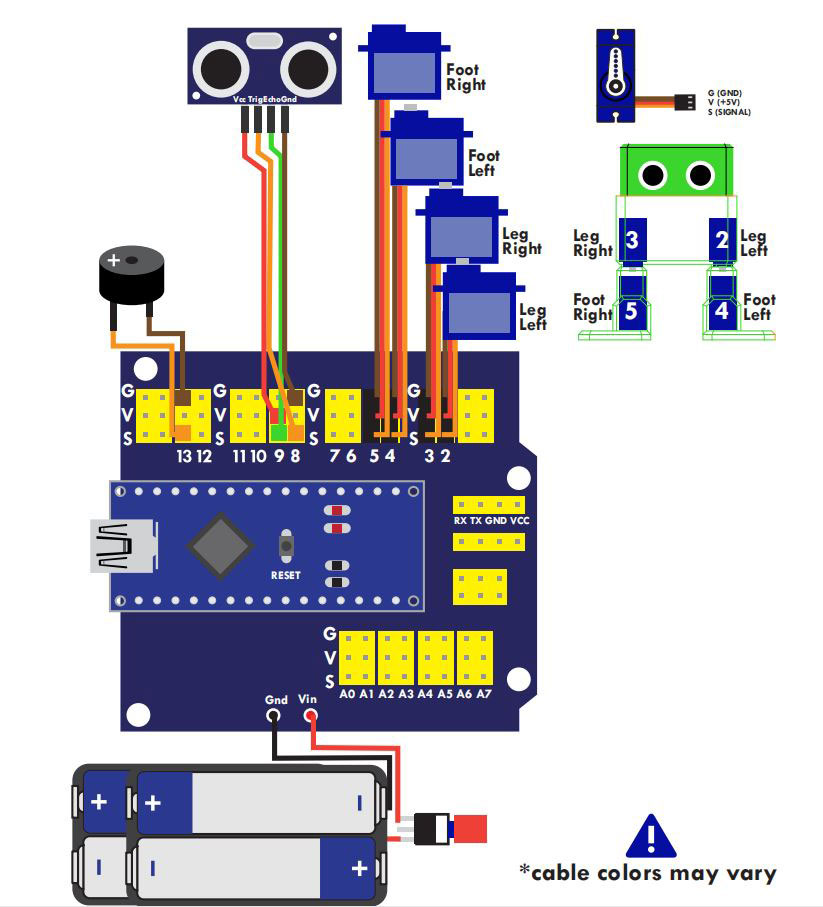
将超声波传感器推到眼睛的极限处,将Arduino nano安装到扩展板之后,你也可以将电池底座的线缆正极焊接到板子的Vin接线柱上,负极接到GND上。将连接好的板子,对准3d打印的头部上的USB连接口,再用至少两颗螺丝将他们固定到头部上.
线路连接
准备好杜邦线及及蜂鸣器,根据图形所示的连接方法将各处引针连接完毕
注意
在Nano板上传代码时,碰到以下avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x36错误,可以尝试在Arduino IDE上尝试以下操作以下菜单:
'工具- 处理器 - ATmega328P(Old Bootloader)'应该可以解决
合上头部
头部与身体有卡扣,小心地放置好线缆并合起来。
代码上传
其操作步骤如下:
1.下载并安装Arduino IDE软件
2.下载这里的lib库解压文件并复制到C:UsersuserDocumentsArduinolibraries (或者是你安装的库文件夹所在之处):
3.通过USB线连接你的OTTO
4.打开并上传OttoDIY_smooth_criminal.ino代码到你的Arduino Nano中,之后就可以看到Otto跳舞了:)
效果演示
机器人的运动:
后续扩展
OTTO DIY还有其他各项包括蓝牙控制及其他传感器的交互(可见Ottodiy.com),后续我会加以拓展并推出其他功能供分享,敬请关注.
声明:文章部分内容出自英文直译,并由作者本人的亲历及经验总结,个博地址见:
http://tech.limuqiao.com/archives/24.html
友情关注:2021年底即将推出我们墨飞鱼团队历时大半年研发的灵感写作平台,在墨飞鱼这里希望能帮助更多人找到阅读与写作的乐趣, 敬请收藏了解,12月底见哦~
最后
以上就是知性故事最近收集整理的关于Arduino练习教程-入门版OTTO机器人自己做OTTO机器人是什么元件准备组装代码上传效果演示的全部内容,更多相关Arduino练习教程-入门版OTTO机器人自己做OTTO机器人是什么元件准备组装代码上传效果演示内容请搜索靠谱客的其他文章。








发表评论 取消回复