ros课程的期末作业是控制真实机器人做运动,自行设计小车运动轨迹为特定图案。接下来描述一下控制真实机器人做圆周运动的简单步骤以及可能遇到的问题和我的解决办法。
个人建议是使用软件Bitvise SSH Client进行操作,比较方便。这样就没必要每开一个终端都要连接一次小车。连接小车以及Bitvise SSH Client的使用想必大家都会,so easy好吧。
目录
准备工作
小车做圆周运动
显示路径
常见错误
准备工作
在开始前先对Bitvise SSH Client做一些准备工作,用Bitvise SSH Client连接上小车。大概是这个样子。
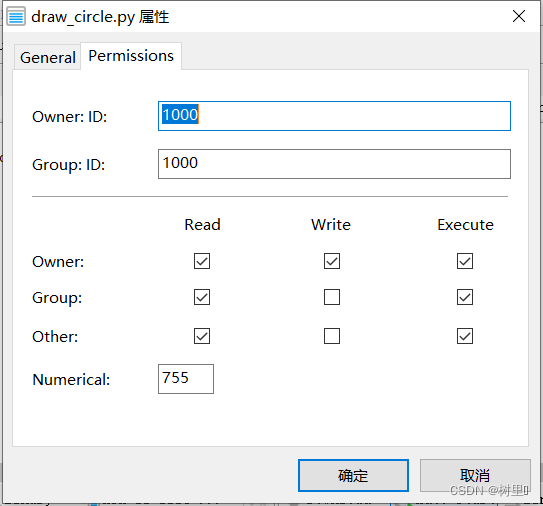
将你自己的Python代码放置/home/EPRobot/robot_ws/src/eprobot_start/script目录下,然后修改代码的权限,右键文件选择Properties,将Execute下面三个框全部勾选。
否则运行代码会显示没有该文件。如下图所示报错。
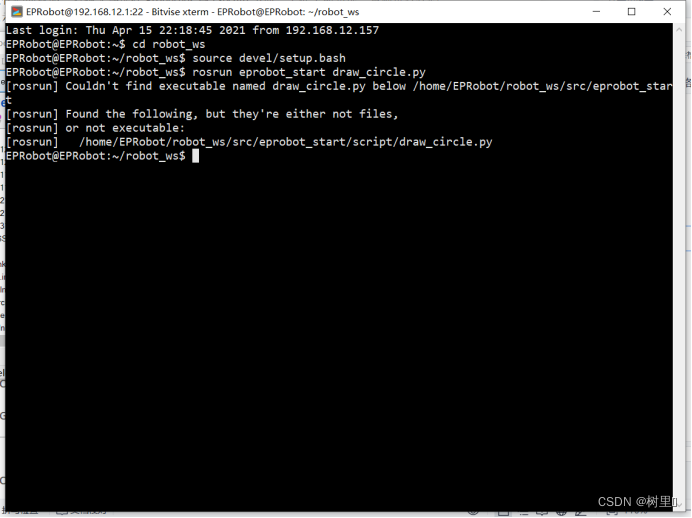
一切准备工作就绪后,就可以开在小车上运行代码了。
小车做圆周运动
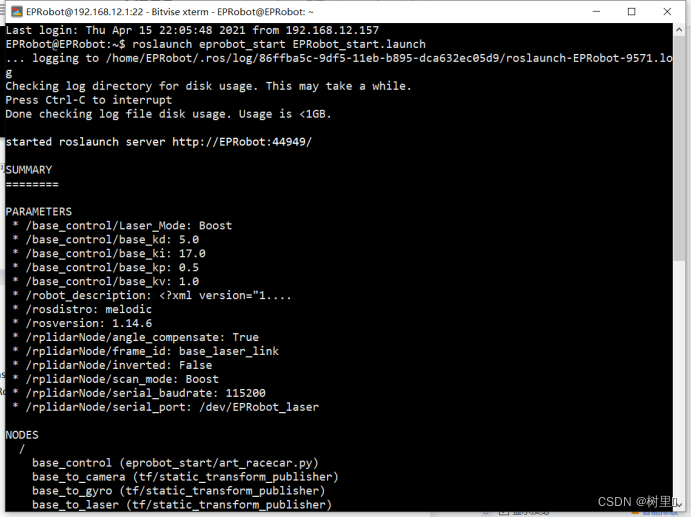
首先对小车的底层控制驱动进行初始化,点击New terminal console开个终端,输入指令
roslaunch eprobot_start EPRobot_start.launch当终端输出以下信息,就说明小车的底层控制驱动已完成初始化。
然后再开个新的终端,输入指令
cd robot_ws
source devel/setup.bash
rosrun eprobot_start draw_circle.py
然后你就能看到你的小车开始运动了!!!!!!!!!
显示路径
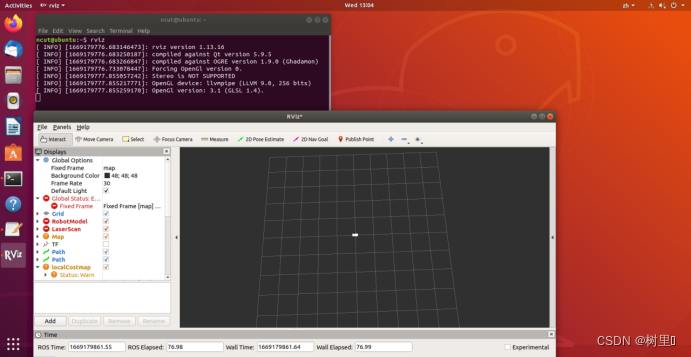
如果想在rviz里显示小车的运动路径的话,需要先完成上述操作,然后在Ubuntu开启一个终端运行指令rviz,打开rviz。
rviz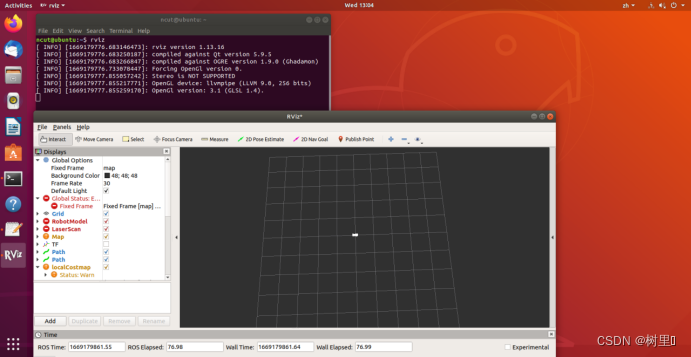
再在Bitvise SSH Client里开启一个新终端,输入指令
cd robot_ws
source devel/setup.bash
rosrun eprobot_start show_path.py
这里要记得先对show_path.py重复对draw_circle.py的放置指定目录以及改权限操作。
然后回到rviz,将Fixed Frame改为odom。然后点击左下角add。
添加path
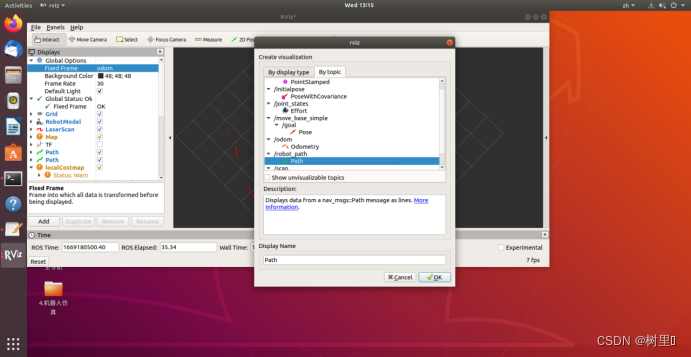
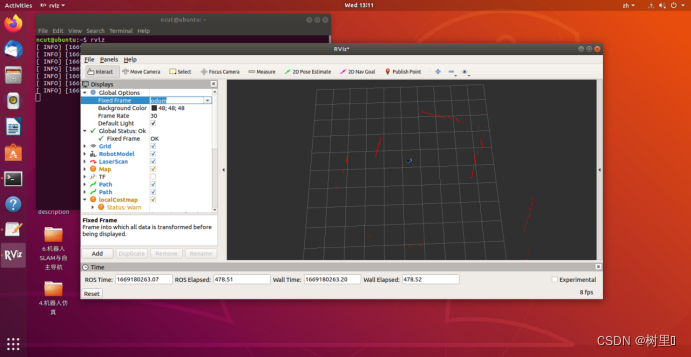
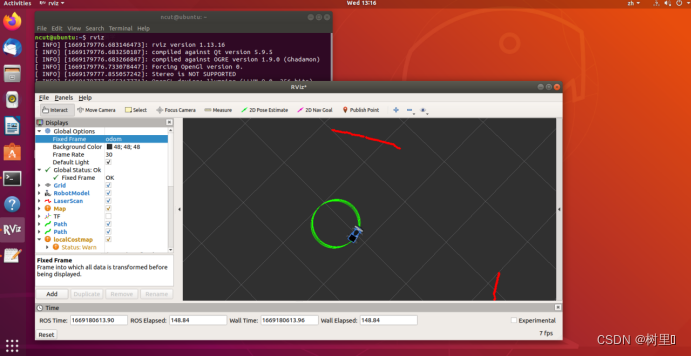
最后就能在rviz中看到小车运行的轨迹了。
记得以上的顺序不能乱,反正我顺序一乱就会出现各种问题。当然,如果嫌手动修改rviz以及输入代码的话,可以写一个launch文件,实现一键执行!!!在此就不多作赘述。
常见错误
如果打开rviz发生以下问题,
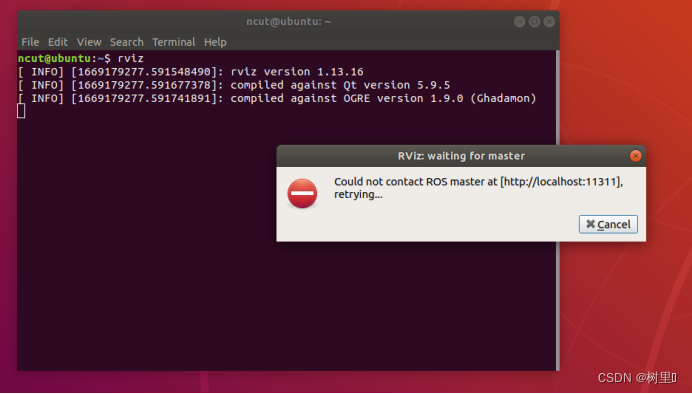
可能是因为没有修改host,首先打开Ubuntu里的.bashrc文件,修改为
#EPRobot
export ROS_MASTER_URI=http://EPRobot:11311
export ROS_HOSTNAME=ubuntu然后在SSH里的stc目录下找到host文件
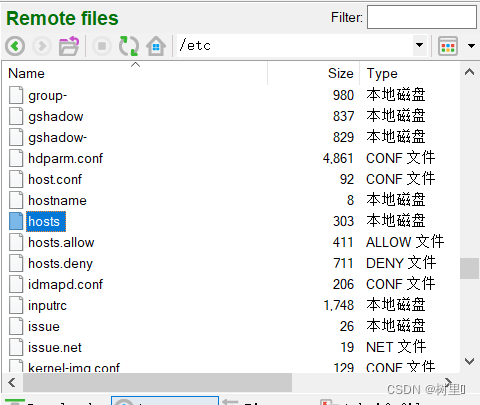
将ip改为Ubuntu的IP
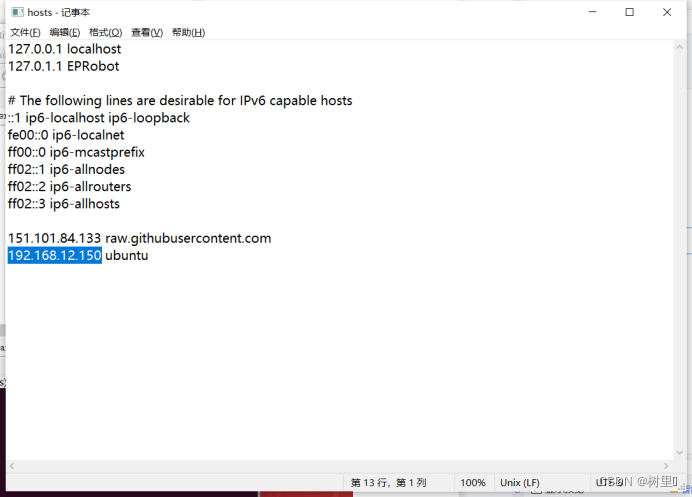
退出保存。然后再打开rviz就可以了。
至此,over!!!!! over!!!!!over!!!!!
最后
以上就是昏睡香烟最近收集整理的关于ros小车控制学习-------控制真实机器人做圆周运动的全部内容,更多相关ros小车控制学习-------控制真实机器人做圆周运动内容请搜索靠谱客的其他文章。

![[ROS2 基础] Navigation2 导航系统介绍](https://www.shuijiaxian.com/files_image/reation/bcimg27.png)






发表评论 取消回复