功能包简介
ROS功能包名称:dji_sdk
功能包功能:用于DJI 板载SDK的ROS版本
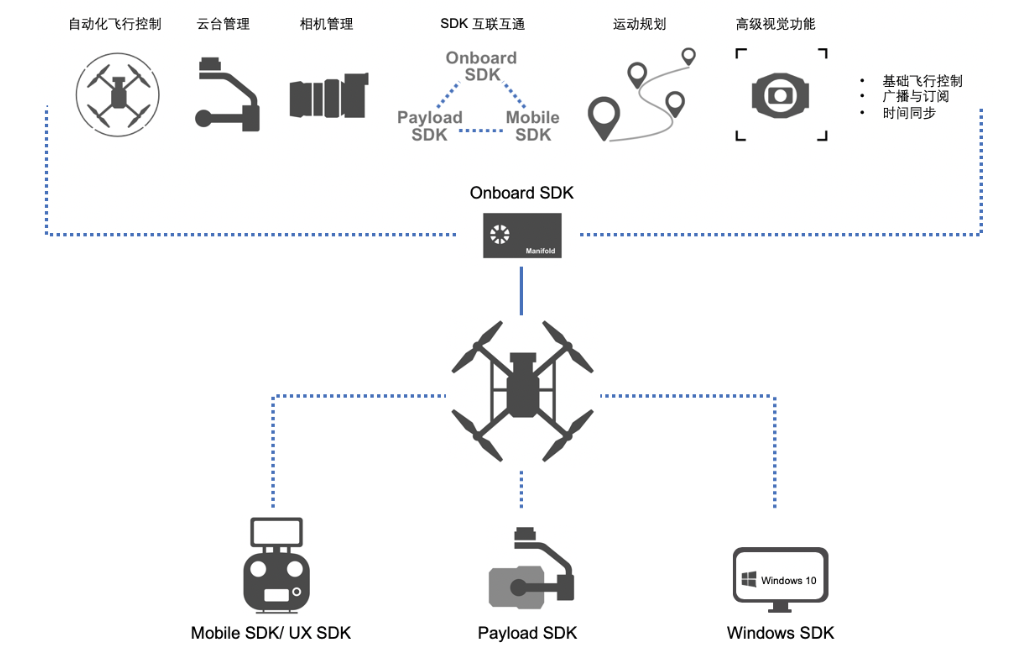
OSDK 是一个用于开发无人机应用程序的开发工具包,基于OSDK 开发的应用程序能够运行在机载计算机上(如Manifold 2),开发者通过调用OSDK 中指定的接口能够获取无人机上的各类数据,经开发者设计的软件逻辑和算法框架,执行相应的计算和处理,生成对应的控制指令控制无人机执行相应的动作,实现如自动化飞行、负载控制和视频图像分析等功能。
主要优势
-
兼容广泛的软硬件平台
使用OSDK 开发的应用程序能够运行在主流的嵌入式硬件平台上,如STM32等,也可运行在主流的嵌入式操作系统和软件架构中,如Linux、ROS及RTOS,开发者按照跨平台移植中的步骤执行所需的工作后,即可在不同版本的软硬件平台上运行基于OSDK 开发的应用程序。 -
满足复杂的控制需要
通过调用OSDK 开放的接口,即可使无人机按照指定的控制逻辑在极端环境中实现自主飞行、负载控制及图像感知等应用功能。 -
支持丰富的拓展方案
OSDK 提供了丰富的接口,方便开发者使用第三方应用程序和算法框架,使用图像识别、自主巡航及SLAM 等技术开发出专业的应用软件,此外,还方便开发者接入第三方传感器、相机或检测设备,采集所需的数据信息,满足用户个性化的应用功能和控制需求。
该功能包为 DJI 机载 SDK 提供了 ROS 接口,使用户能够使用 ROS 消息和服务完全控制无人机。
目前支持的无人机平台有:
- DJI M300
- DJI M100
- M600
- M210
- 配备 A3/N3 飞控的无人机。
功能包依赖DJI SDK 核心库,链接地址为:DJI SDK 核心库
注意:功能包有很多的版本,要根据自己的平台,选择正确的版本
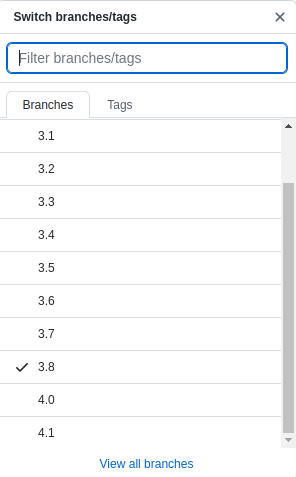
其中4.0和4.1是能够支持M300无人机飞行平台的
对于 A3/N3 飞控的无人机,最新的支持版本是3.8版本
ROS WIKI地址:http://wiki.ros.org/dji_sdk
最后
以上就是洁净苗条最近收集整理的关于DJI 无人机 Onboard SDK ROS 功能包简介功能包简介的全部内容,更多相关DJI内容请搜索靠谱客的其他文章。








发表评论 取消回复