【超详细】基于大疆RoboMaster开发板C型的BMI088数据读取
这里以博世传感器公司产出的BMI088型号的IMU为例,其里面有3轴高精度加速度计和3轴高精度陀螺仪,其他的特性不再介绍
同时这里的IMU是安装在大疆公司出产的RoboMaster开发板C型,单片机芯片是STM32F407IGH6,其外围电路已经设计好,只需要读取IMU数据即可。
本篇不会介绍SPI、I2C等嵌入式通信协议,需要有一定嵌入式开发基础的同学来看
文章末附代码
零、数据手册分析
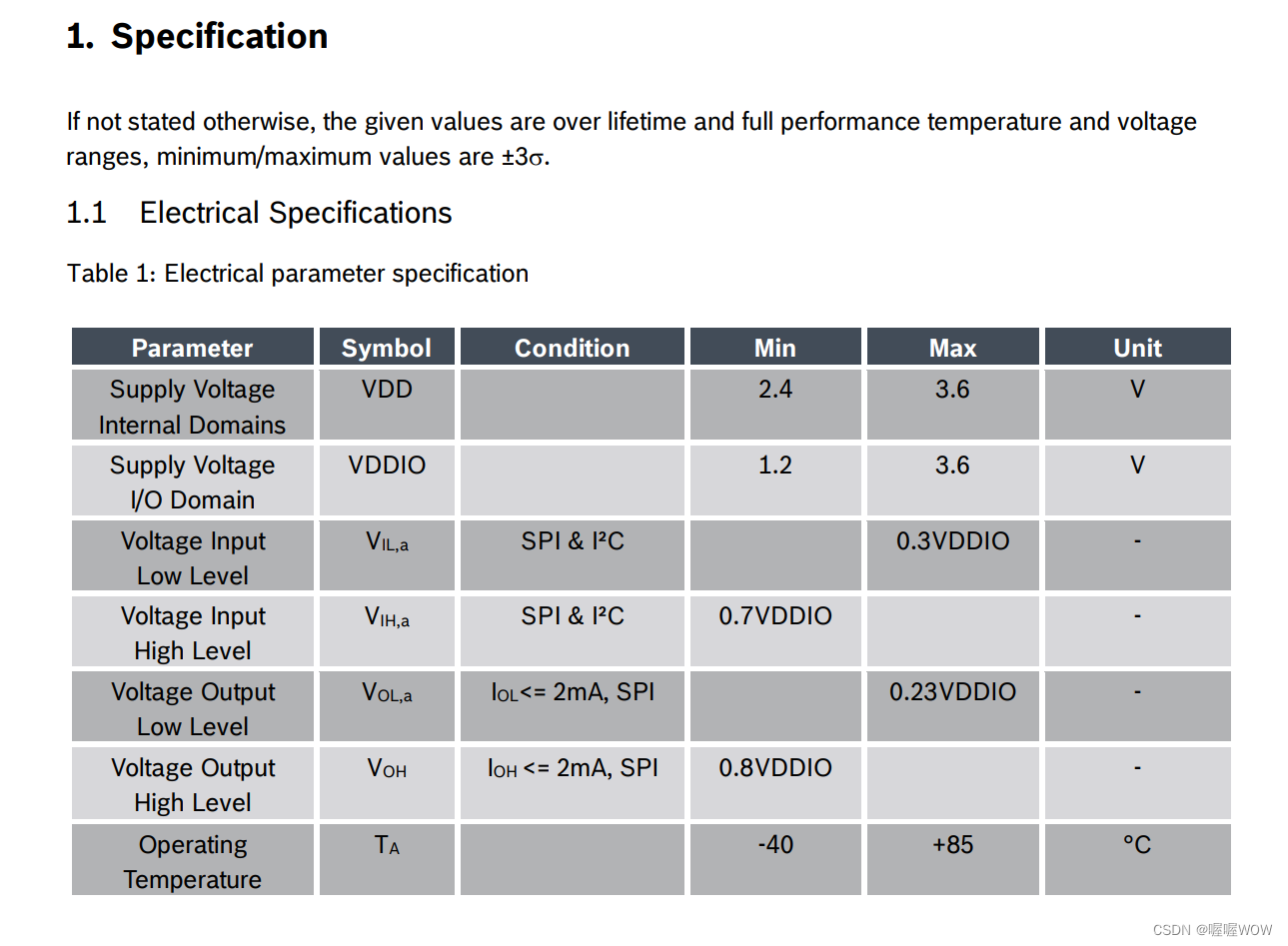
我们打开这款陀螺仪的手册,可以看到,手册的第一章讲述了BMI088的硬件特性,需要多少伏的电压、电流之类的,这一章只有在我们拿到IMU芯片,想把它设计装在自己的电路板上面的时候才会考虑到,其他时候这些硬件特性不是我们需要考虑的范围,也不是本篇要介绍的内容。
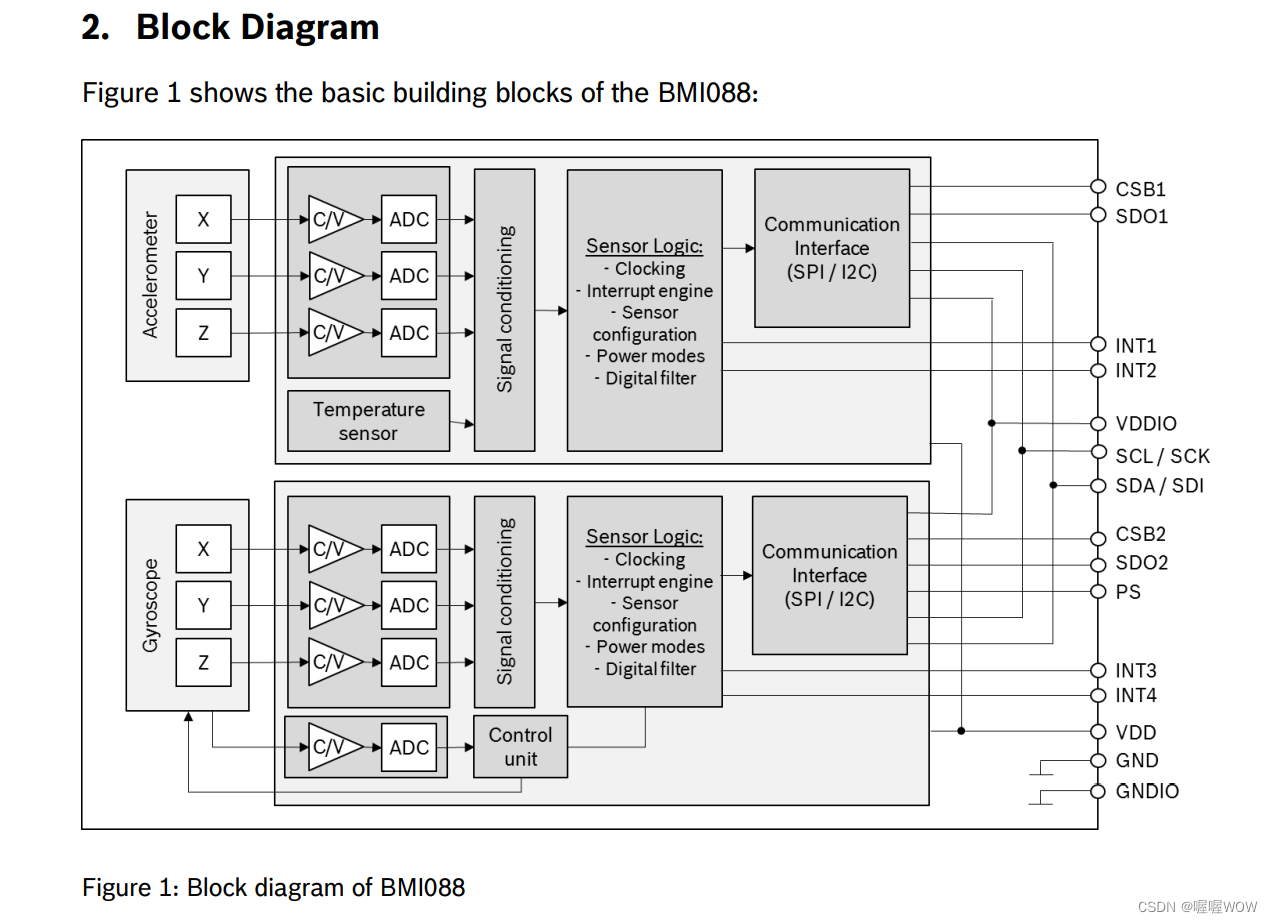
第二章讲述了BMI088的内部结构,抓一些重点,BMI088里面,在加速度计的部分有一个温度传感器可以读取;同时加速度计和陀螺仪均有中断口,可以高速输出数据;加速度计和陀螺仪共用一个输出总线,可以选择SPI总线或者I2C总线;陀螺仪部分有一个控制单元;
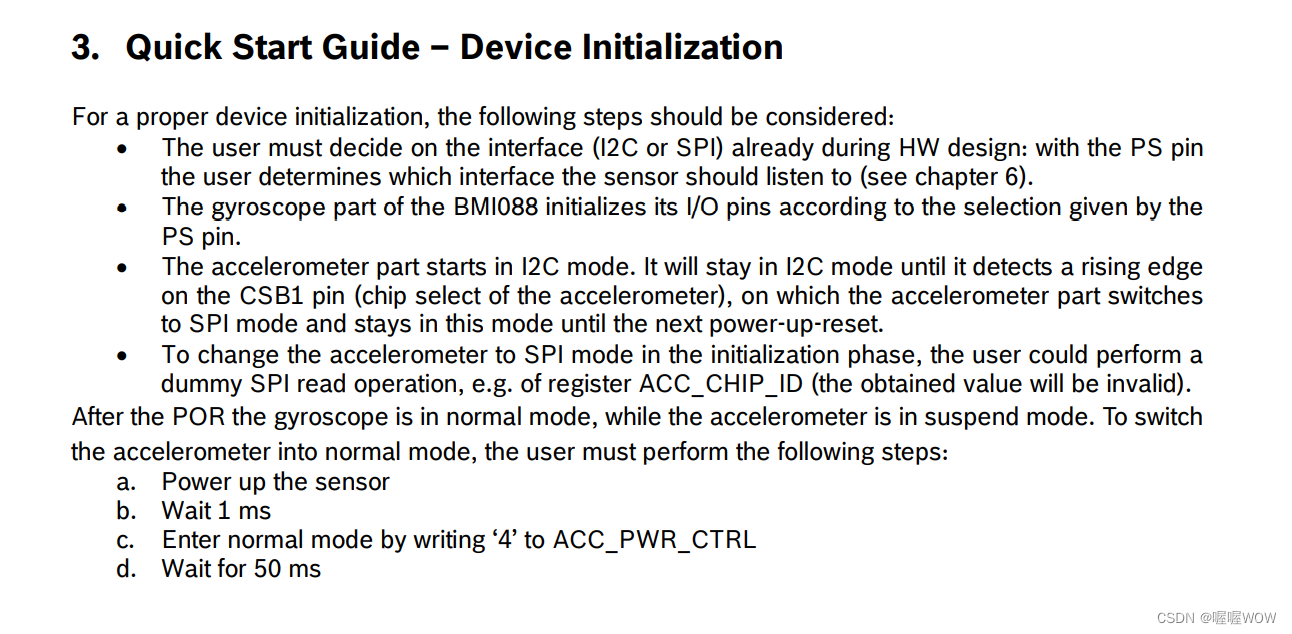
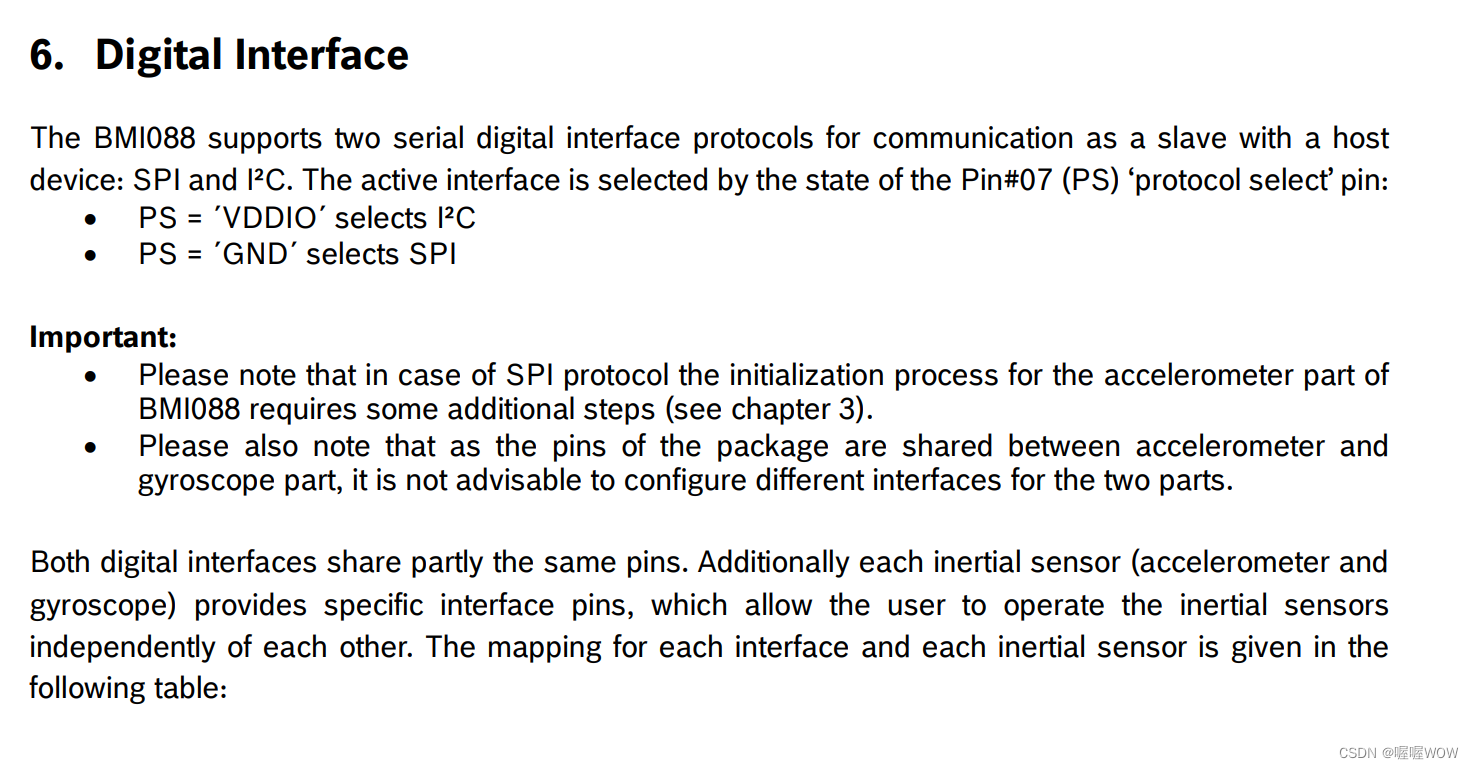
第三章开始,讲述了怎样快速开始,告诉我们IMU是通过监测PS引脚的电平来决定采用SPI还是I2C通信协议,同时告诉了我们一个重要的信息,BMI088的加速度计上电的时候默认是I2C通信方式,直到它监测到了SPI的片选IO口电平上升变化,同时加速度计默认是挂起模式,即不更新加速度或者温度等数据,但内部的ID号之类的是可以读取的,所以我们初始化的时候,要先将加速度计的片选IO口电平拉起,之后将加速度计的模式从挂起模式设置为正常模式。同时给出了一种快速的初始化过程,先上电,等1ms,然后往ACC_PWR_CTRL寄存器写入4,之后等待50ms
第四章开始,介绍了各个寄存器代表的意义和设置数值对应的结果,这一部分是读取的时候需要参考的,这里不再详细介绍
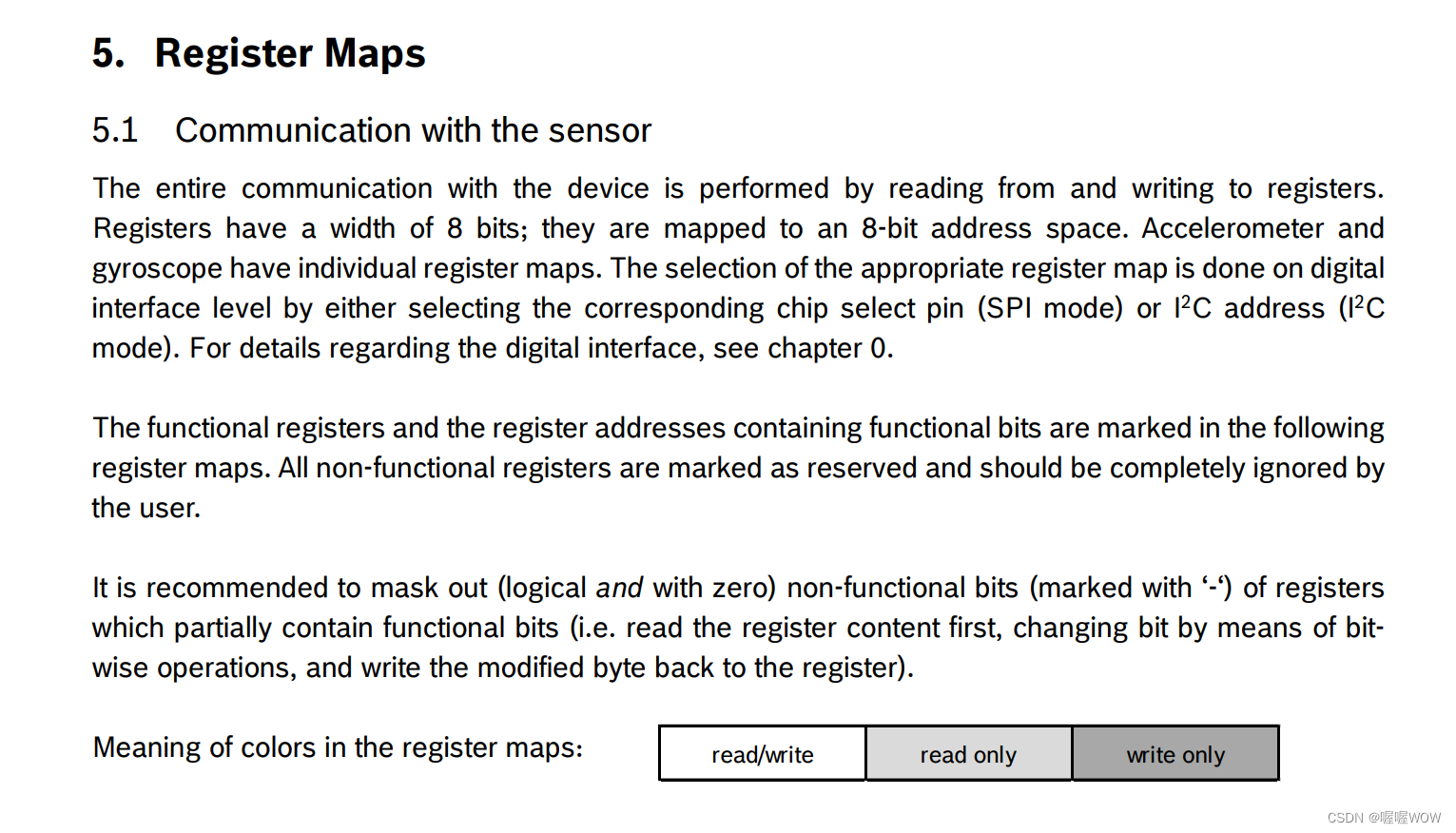
第五章开始,列出了BMI088的加速度计和陀螺仪的寄存器表,这也是读取的时候需要参考的部分,这里不过多讲解
第六章开始,讲述了如何使用SPI或者I2C与BMI088进行数据通信,这一章比较重要,是我们读取的基础
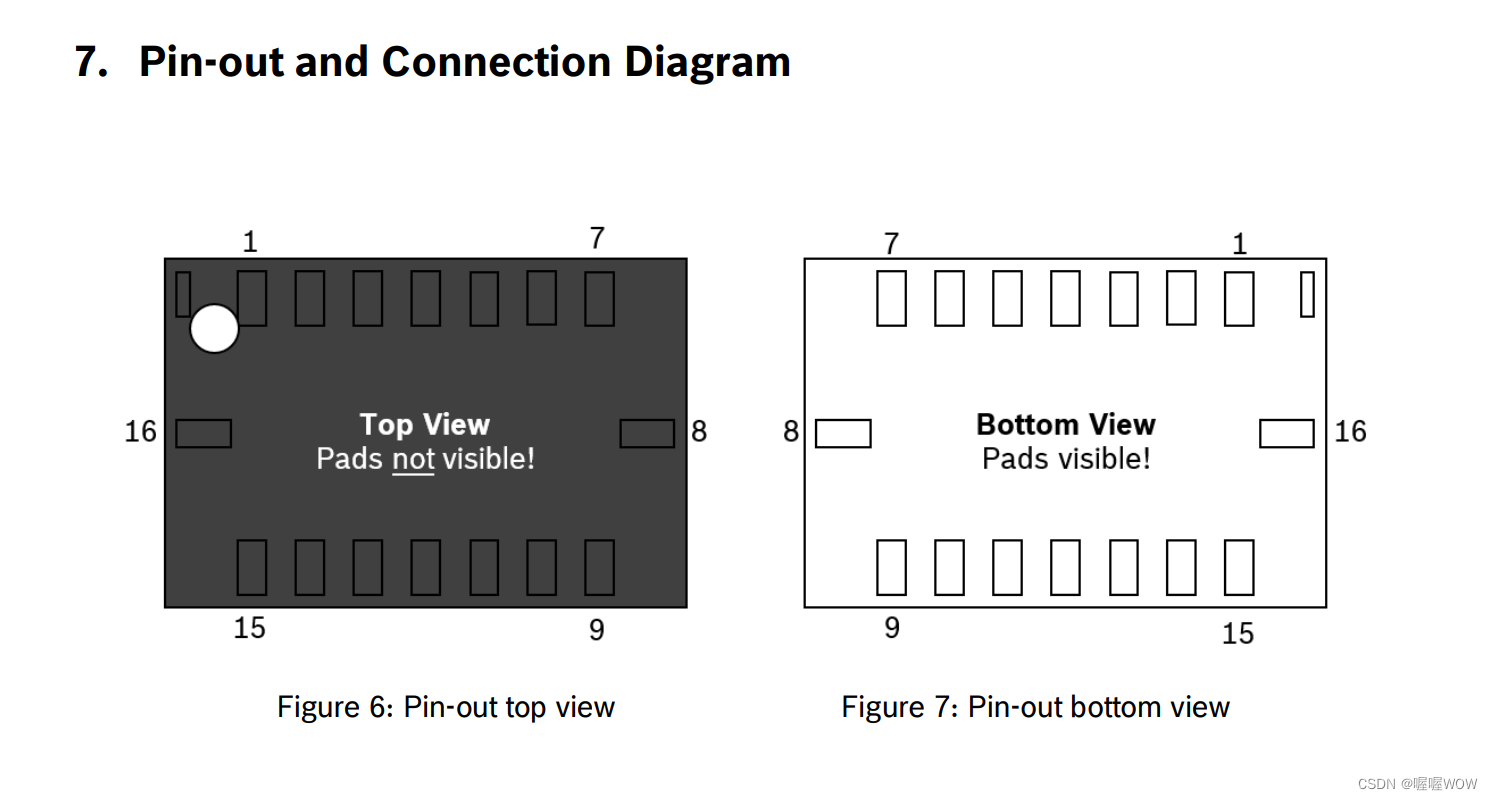
第七章是BMI088的引脚图
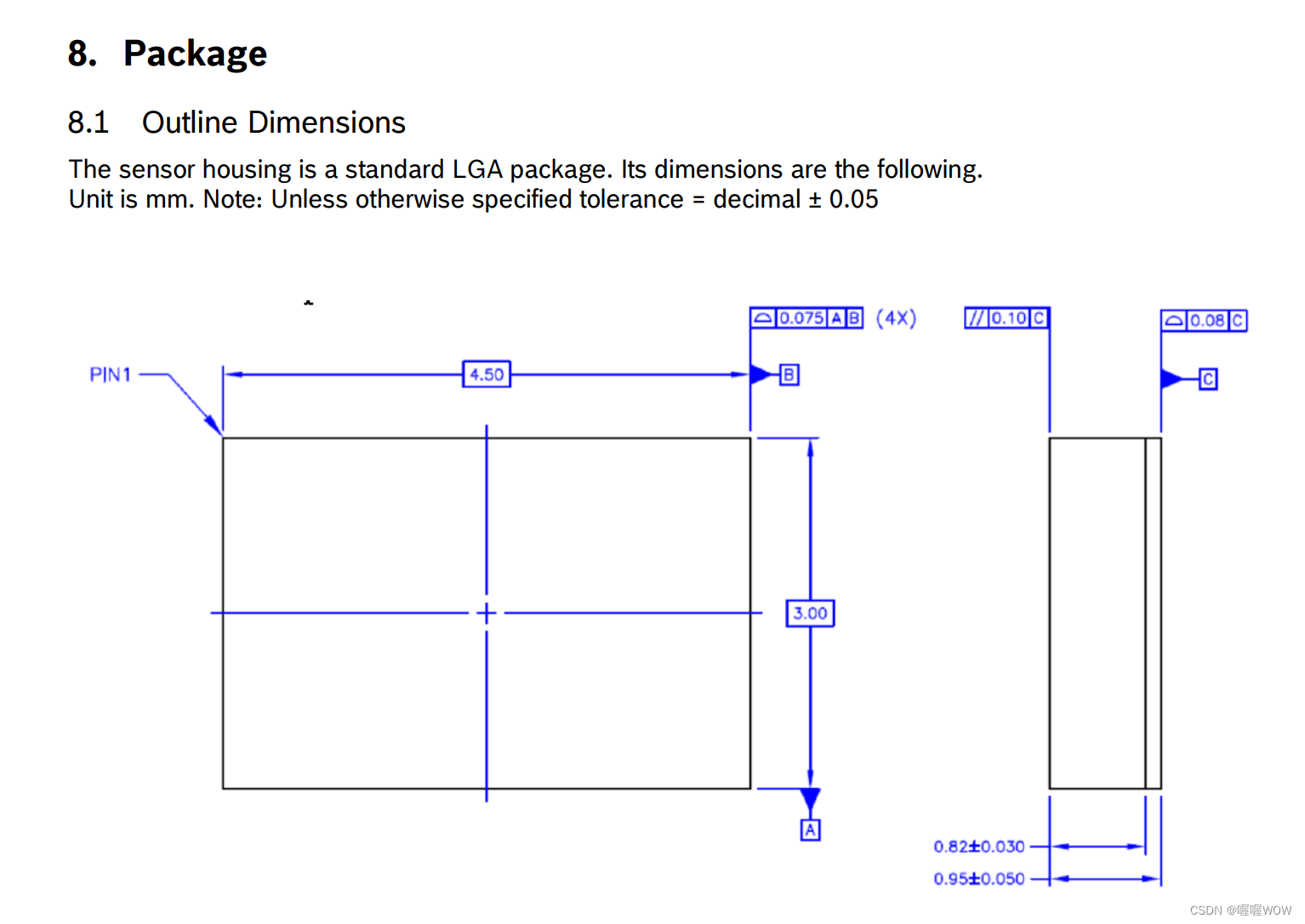
第八章是BMI088的设计参考图,以及需要参考的电路设计参数
第九章是免责声明
一、CubeMX配置
由于这里是使用RoboMaster开发板C型(以下简称“C板”),我们需要看用户手册确定C板上面的IMU是怎么设计的
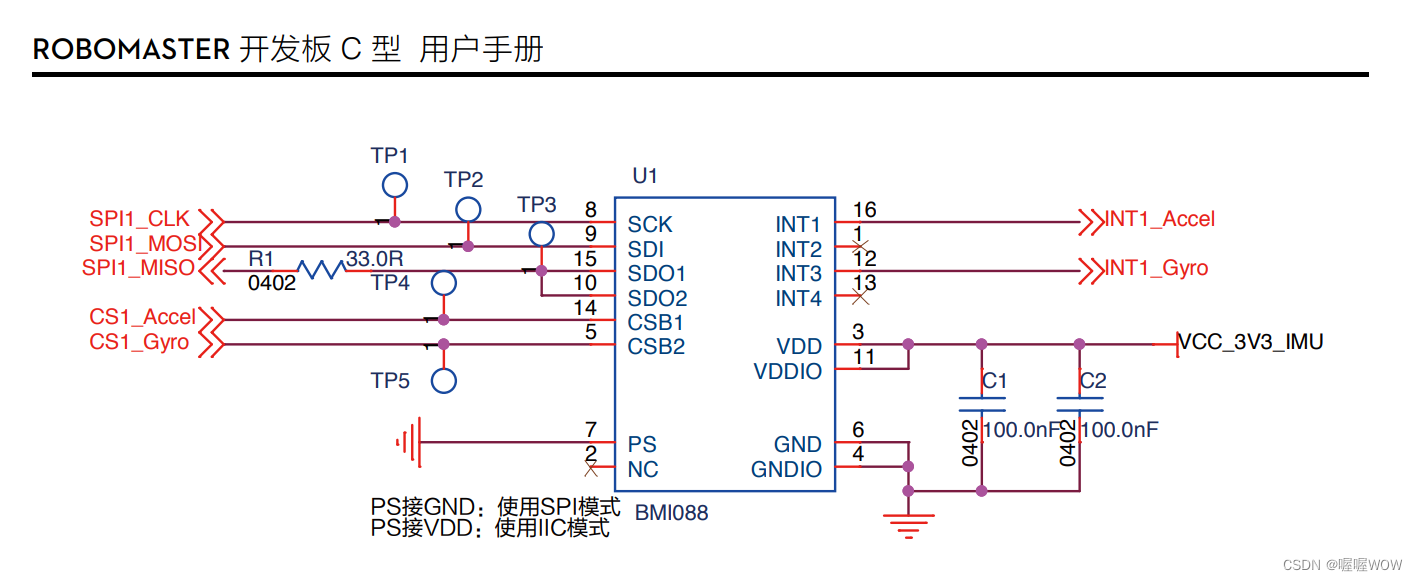
可以看到,在芯片中,BMI088的PS引脚是被接到了GND上面,也就是说,C板上面的BMI088默认使用SPI通信方式进行通信,同时使用的是C板的SPI1总线。现在我们需要确定Cube中SPI配置的几个参数,就是下面这几个(这个图是我配置好的图,可以直接抄)
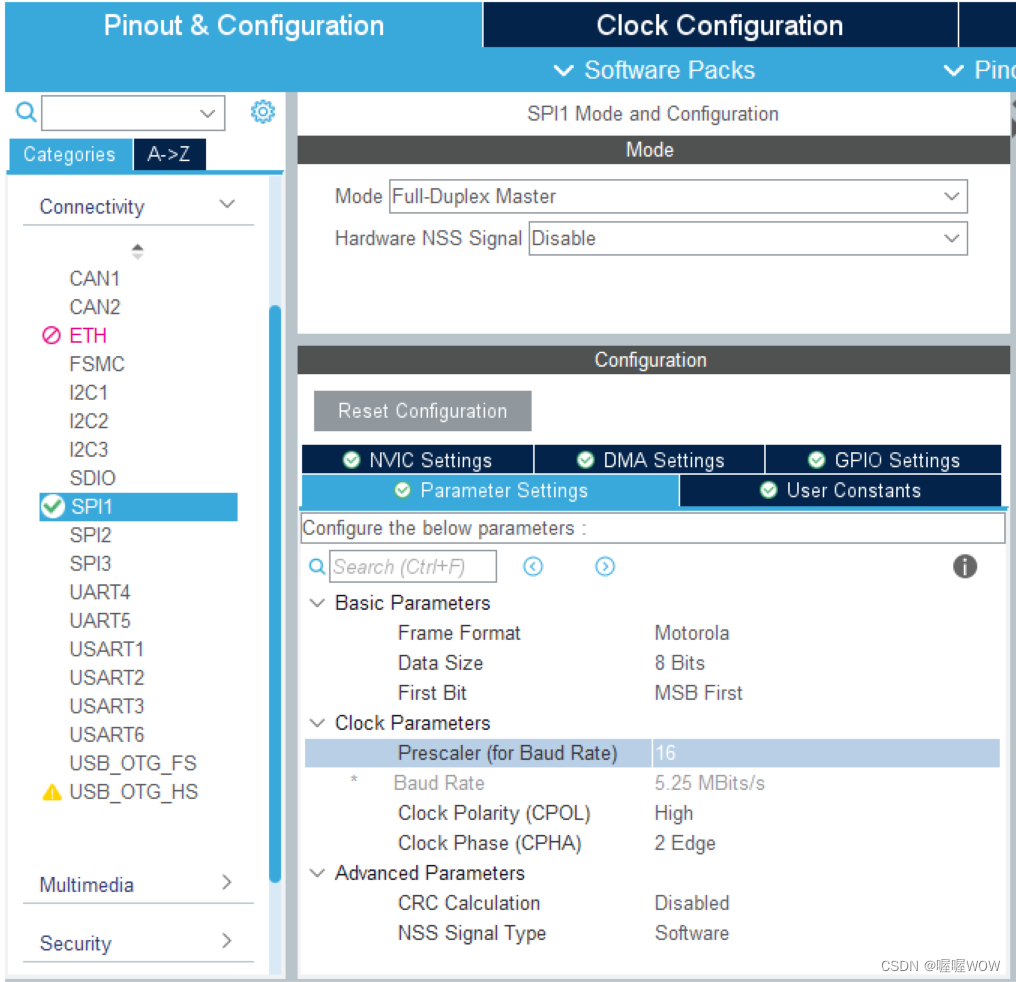
首先是Mode,没有特别说明的话,都选择全双工SPI通信,就是图上这个Full-Duplex Master
然后是Hardware NSS Signal,这个是硬件片选的意思,我们这里采用软件写CS电平的方式,因为加速度计和陀螺仪共用一条SPI总线,我们需要通过片选来确定此时读取哪个模块,所以这个地方选择Disable
下方的Frame Format,没有特别说明都选择Motorola格式
再下方的Data Size,没有特别说明都选择8Bits
然后是First Bit,也就是大小端的问题,关于大小端是什么可以自行百度,这里不再赘述。同样查询数据手册发现
这里的值的第一位是bit7,也就是MSB端,所以可以断定我们的First Bit是MSB first
然后就到了时钟配置的预分频系数Prescaler这里,这里注意到是要跟你C板的时钟配置相关联的,放出我的C板时钟配置
其中,C板(F406芯片)的SPI1总线是挂载在APB1时钟上的,也就是说这个时候SPI1的初始时钟是84MHz,我们再来看数据手册中关于SPI的时钟要求
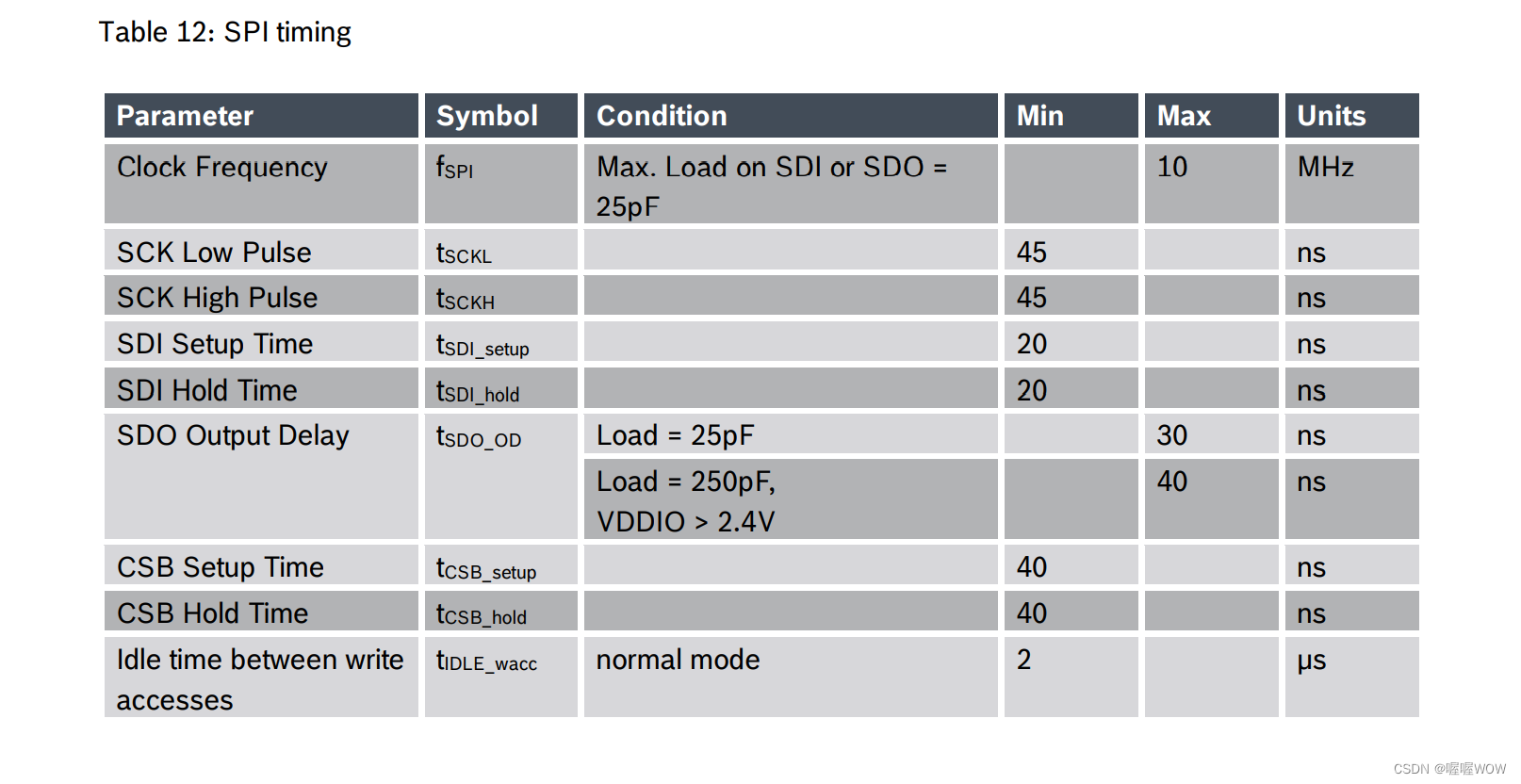
可以发现,BMI088的SPI时钟要求最大通信频率为10MHz,所以我们默认的Prescaler=2的是肯定不能用的,因为
SPI时钟频率 = APB1时钟频率 / 预分频系数
所以在APB1时钟频率为84MHz的情况下,我们需要起码预分频系数要大于8,所以我选择了Prescaler=16
下一个是CPOL和CPHA,这两个一般是同时配置的,关于这两个参数代表的含义这里也不再赘述,可以自行百度。我们继续查询数据手册:

手册上写的很清楚了,BMI088的SPI通信支持‘00’和‘11’两种模式,在Cube里面,CPOL=0和CPOL=Low是一个意思,CPHA=0和CPHA=1 edge也是一个意思,所以我们可以同时选择’CPOL=Low,CPHA=1 edge’或者‘CPOL=High,CPHA=2 edge’,效果是一样的
至于再下面的两个参数,CRC和NSS,按照默认就好了,即不需要CRC和软件片选
配置完了这些参数,还需要注意一点,就是C板上面SPI的端口有可能和Cube上面默认生成的端口不一致,我们需要额外确认一下
先观察C板的SPI端口,打开C板原理图:
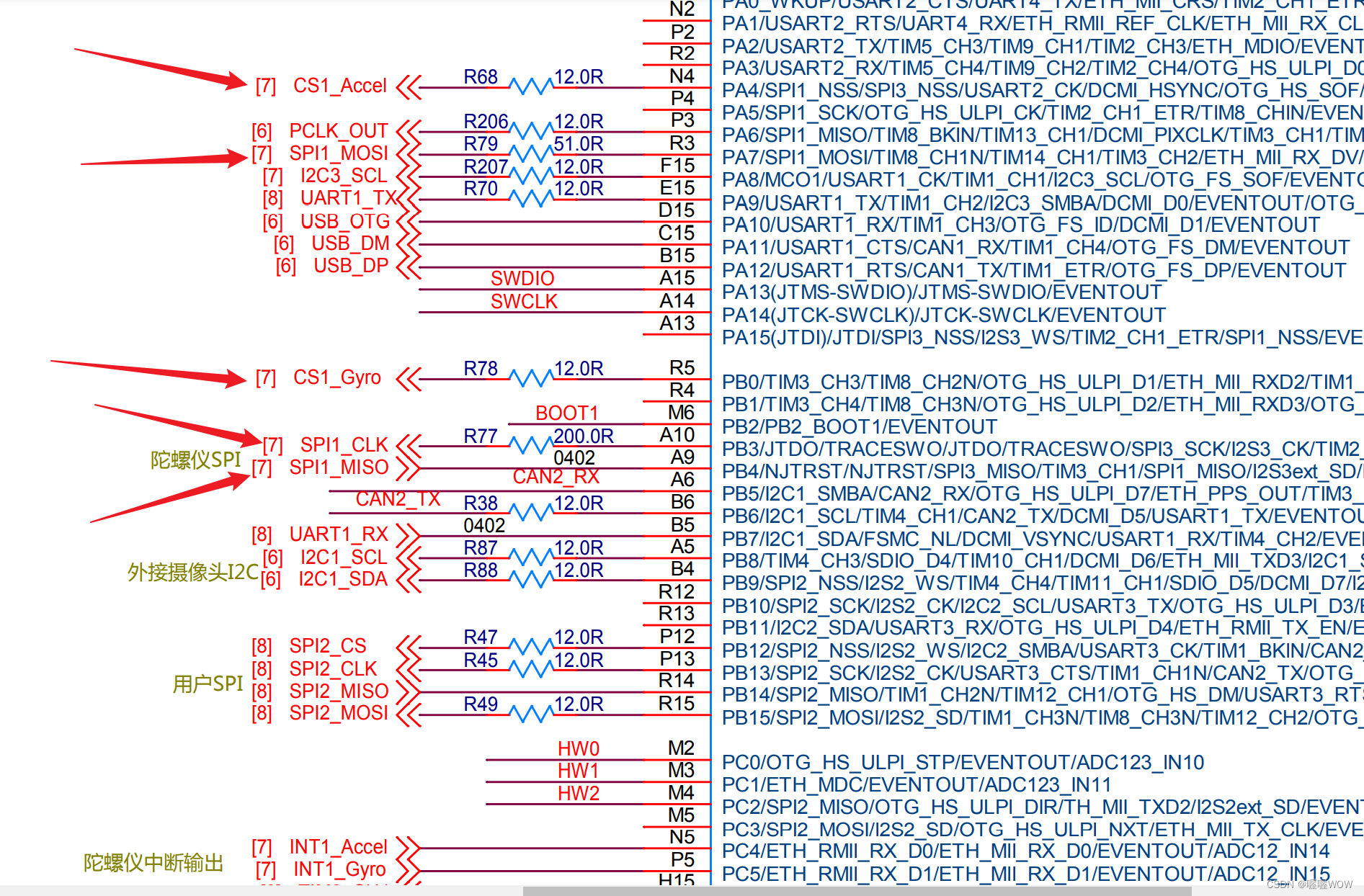
首先负责片选的CS口是不会被默认添加的,我们需要手动添加。观察得到,加速度计的CS口是PA4,陀螺仪的片选口是PB0,添加这两个GPIO口。同时观察BMI088数据手册得到,片选口拉低电平有效,所以把这两个GPIO口的电平选择默认高电平
其次观察SPI的部分,检查SPI1_MOSI端口是否是PA7,SPI1_CLK端口是否是PB3,SP1_MISO端口是否是PB4,正确的配置如下
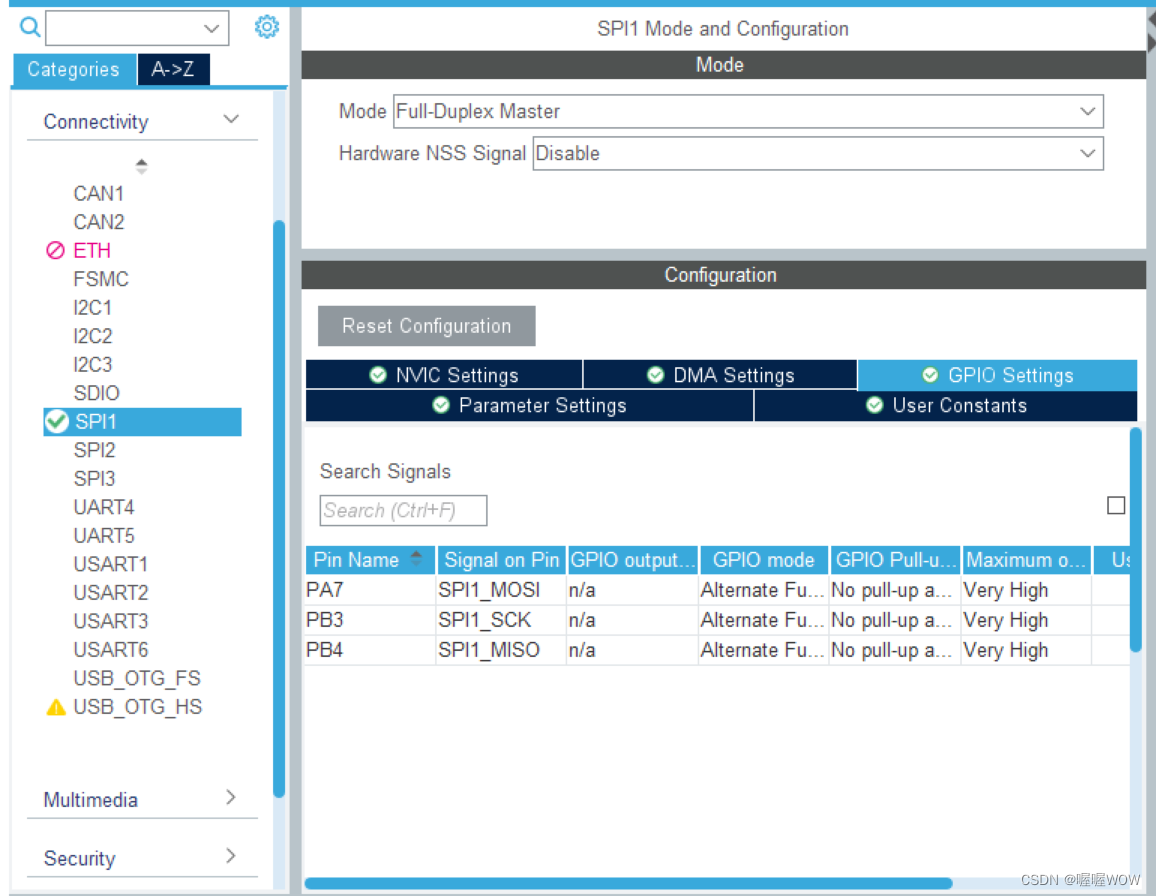
到此,我们的SPI部分就配置好了,用CubeMX生成代码即可
二、代码编写
代码编写的第一部分,先写一些比较基础的宏定义和变量类型,便于以后用
SPI端口定义:
#define BMI088_SPI hspi1
#define BMI088_ACC_GPIOx GPIOA
#define BMI088_ACC_GPIOp GPIO_PIN_4
#define BMI088_GYRO_GPIOx GPIOB
#define BMI088_GYRO_GPIOp GPIO_PIN_0
BMI088用到的数据结构体定义
typedef struct acc_raw_data_t {
float x;
float y;
float z;
} acc_raw_data_t;
typedef struct gyro_raw_data_t {
float roll;
float pitch;
float yaw;
} gyro_raw_data_t;
typedef struct acc_data_t {
acc_raw_data_t acc_raw_data;
float sensor_time;
float temperature;
bool enable_self_test;
} acc_data_t;
typedef struct gyro_data_t {
gyro_raw_data_t gyro_raw_data;
bool enable_self_test;
} gyro_data_t;
typedef enum bmi088_error_e {
NO_ERROR = 0,
ACC_CHIP_ID_ERR = 0x01,
ACC_DATA_ERR = 0x02,
GYRO_CHIP_ID_ERR = 0x04,
GYRO_DATA_ERR = 0x08,
} bmi088_error_e;
typedef struct bmi088_data_t {
acc_data_t acc_data;
bmi088_error_e bmi088_error;
} bmi088_data_t;
BMI088的寄存器表
/*-----加速度计寄存器表-----*/
#define ACC_CHIP_ID_ADDR 0x00
#define ACC_CHIP_ID_VAL 0x1E
#define ACC_ERR_REG_ADDR 0x02
#define ACC_STATUS_ADDR 0x03
#define ACC_X_LSB_ADDR 0x12
#define ACC_X_MSB_ADDR 0x13
#define ACC_Y_LSB_ADDR 0x14
#define ACC_Y_MSB_ADDR 0x15
#define ACC_Z_LSB_ADDR 0x16
#define ACC_Z_MSB_ADDR 0x17
#define ACC_XYZ_LEN 6
#define SENSORTIME_0_ADDR 0x18
#define SENSORTIME_0_UNIT (39.0625f / 1000000.0f)
#define SENSORTIME_1_ADDR 0x19
#define SENSORTIME_1_UNIT (10.0 / 1000.0f)
#define SENSORTIME_2_ADDR 0x1A
#define SENSORTIME_2_UNIT (2.56f)
#define SENSORTIME_LEN 3
#define ACC_INT_STAT_1_ADDR 0x1D
#define TEMP_MSB_ADDR 0x22
#define TEMP_LSB_ADDR 0x23
#define TEMP_LEN 2
#define TEMP_UNIT 0.125f
#define TEMP_BIAS 23.0f
#define ACC_CONF_ADDR 0x40
#define ACC_CONF_RESERVED 0x01
#define ACC_CONF_BWP_OSR4 0x00
#define ACC_CONF_BWP_OSR2 0x01
#define ACC_CONF_BWP_NORM 0x02
#define ACC_CONF_ODR_12_5_Hz 0x05
#define ACC_CONF_ODR_25_Hz 0x06
#define ACC_CONF_ODR_50_Hz 0x07
#define ACC_CONF_ODR_100_Hz 0x08
#define ACC_CONF_ODR_200_Hz 0x09
#define ACC_CONF_ODR_400_Hz 0x0A
#define ACC_CONF_ODR_800_Hz 0x0B
#define ACC_CONF_ODR_1600_Hz 0x0C
#define ACC_RANGE_ADDR 0x41
#define ACC_RANGE_3G 0x00
#define ACC_RANGE_6G 0x01
#define ACC_RANGE_12G 0x02
#define ACC_RANGE_24G 0x03
#define INT1_IO_CTRL_ADDR 0x53
#define INT2_IO_CTRL_ADDR 0x54
#define INT_MAP_DATA_ADDR 0x58
#define ACC_SELF_TEST_ADDR 0x6D
#define ACC_SELF_TEST_OFF 0x00
#define ACC_SELF_TEST_POS 0x0D
#define ACC_SELF_TEST_NEG 0x09
#define ACC_PWR_CONF_ADDR 0x7C
#define ACC_PWR_CONF_SUS 0x03
#define ACC_PWR_CONF_ACT 0x00
#define ACC_PWR_CTRL_ADDR 0x7D
#define ACC_PWR_CTRL_ON 0x04
#define ACC_PWR_CTRL_OFF 0x00
#define ACC_SOFTRESET_ADDR 0x7E
#define ACC_SOFTRESET_VAL 0xB6
/*-----陀螺仪寄存器表-----*/
#define GYRO_CHIP_ID_ADDR 0x00
#define GYRO_CHIP_ID_VAL 0x0F
#define GYRO_RATE_X_LSB_ADDR 0x02
#define GYRO_RATE_X_MSB_ADDR 0x03
#define GYRO_RATE_Y_LSB_ADDR 0x04
#define GYRO_RATE_Y_MSB_ADDR 0x05
#define GYRO_RATE_Z_LSB_ADDR 0x06
#define GYRO_RATE_Z_MSB_ADDR 0x07
#define GYRO_XYZ_LEN 6
#define GYRO_INT_STAT_1_ADDR 0x0A
#define GYRO_RANGE_ADDR 0x0F
#define GYRO_RANGE_2000_DEG_S 0x00
#define GYRO_RANGE_1000_DEG_S 0x01
#define GYRO_RANGE_500_DEG_S 0x02
#define GYRO_RANGE_250_DEG_S 0x03
#define GYRO_RANGE_125_DEG_S 0x04
#define GYRO_BANDWIDTH_ADDR 0x10
#define GYRO_ODR_2000Hz_BANDWIDTH_532Hz 0x00
#define GYRO_ODR_2000Hz_BANDWIDTH_230Hz 0x01
#define GYRO_ODR_1000Hz_BANDWIDTH_116Hz 0x02
#define GYRO_ODR_400Hz_BANDWIDTH_47Hz 0x03
#define GYRO_ODR_200Hz_BANDWIDTH_23Hz 0x04
#define GYRO_ODR_100Hz_BANDWIDTH_12Hz 0x05
#define GYRO_ODR_200Hz_BANDWIDTH_64Hz 0x06
#define GYRO_ODR_100Hz_BANDWIDTH_32Hz 0x07
#define GYRO_LPM1_ADDR 0x11
#define GYRO_LPM1_NOR 0x00
#define GYRO_LPM1_SUS 0x80
#define GYRO_LPM1_DEEP_SUS 0x20
#define GYRO_SOFTRESET_ADDR 0x14
#define GYRO_SOFTRESET_VAL 0xB6
#define GYRO_INT_CTRL_ADDR 0x15
#define GYRO_INT3_INT4_IO_CONF_ADDR 0x16
#define GYRO_INT3_INT4_IO_MAP_ADDR 0x18
#define GYRO_SELF_TEST_ADDR 0x3C
#define GYRO_SELF_TEST_ON 0x01
然后观察BMI088数据手册中的陀螺仪通信部分
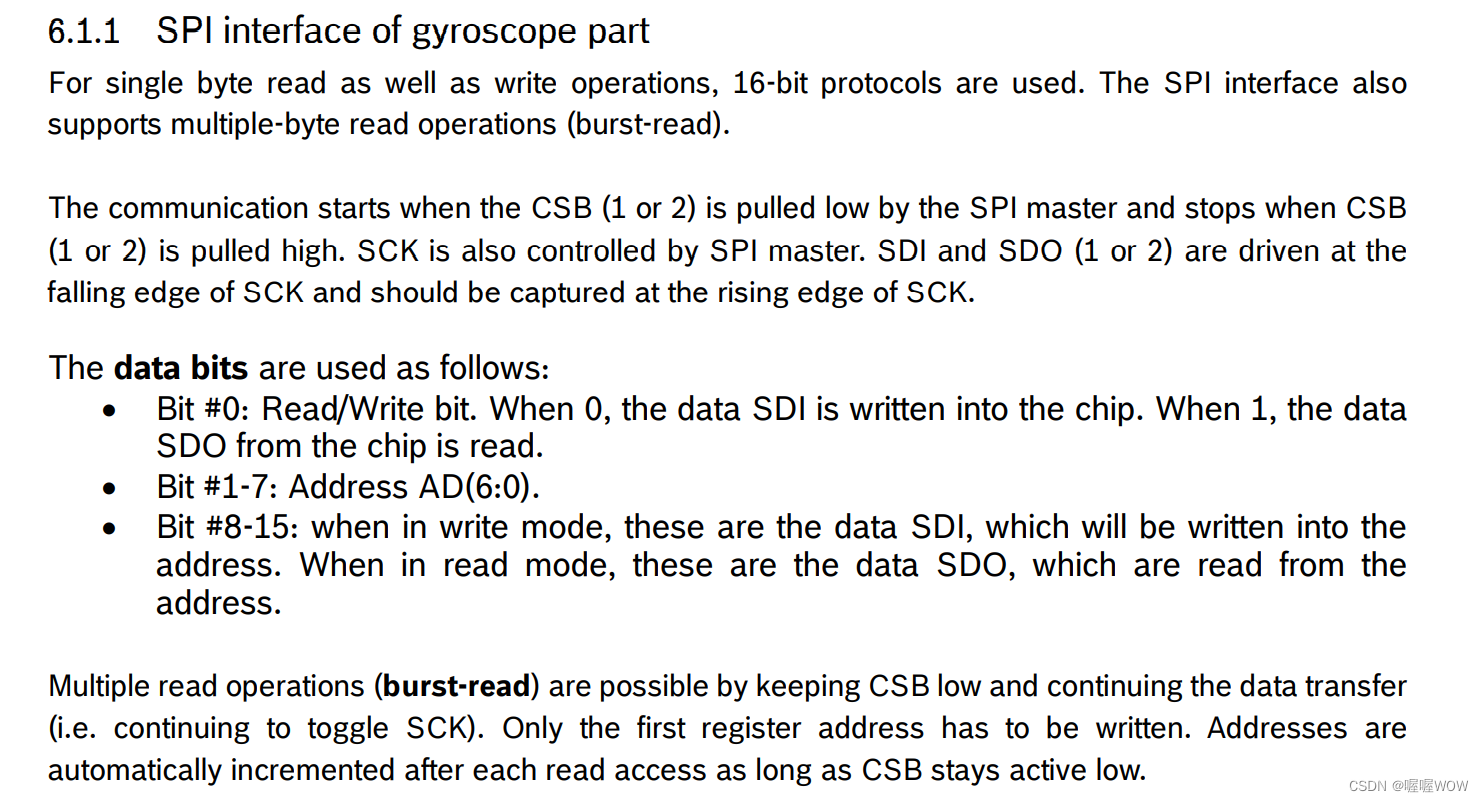
得知,想要往陀螺仪中写入数据,需要先片选陀螺仪,第一个发送字节的bit0为0,bit1-7为地址,然后第二个发送字节为值
所以我们可以得到以下代码
void WriteDataToGyro(uint8_t addr, uint8_t data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr & BMI088_SPI_WRITE_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
pTxData = data;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_Delay(1);
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
同时,如果想要读取陀螺仪的数据,如果是单个数据的话,就需要第一个发送字节为的bit0为1,bit1-7为地址,第二个字节就是我们读取的数据。如果是读取多个数据的话,可以使用burst-read模式,即发送一次地址,然后连续读取即可,地址会自动自增。所以我们又可以得到以下代码
void ReadSingleDataFromGyro(uint8_t addr, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
void ReadMultiDataFromGyro(uint8_t addr, uint8_t len, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
uint8_t pRxData;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
for (int i = 0; i < len; i++) {
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
data[i] = pRxData;
}
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
这样陀螺仪数据的基础读写函数就写完了
之后我们观察BMI088数据手册中的加速度计通信部分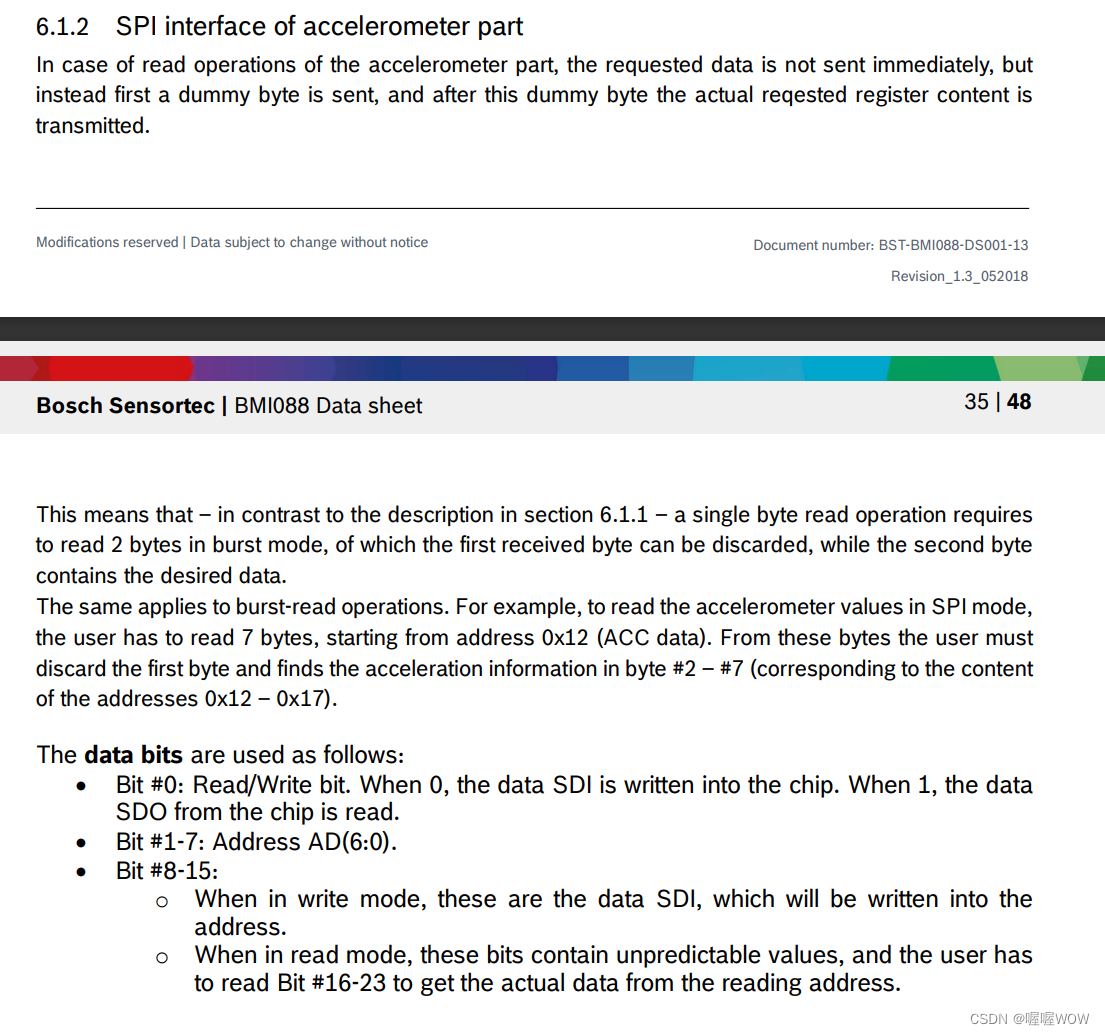
得知,加速度计的写部分跟陀螺仪没区别,但是加速度计的读的部分,其第二个字节是混乱的数据,所以需要用户读取两次才能得到正确的加速度计数据,综合得到以下代码
void WriteDataToAcc(uint8_t addr, uint8_t data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr & BMI088_SPI_WRITE_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
pTxData = data;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_Delay(1);
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
void ReadSingleDataFromAcc(uint8_t addr, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
void ReadMultiDataFromAcc(uint8_t addr, uint8_t len, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
uint8_t pRxData;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
for (int i = 0; i < len; i++) {
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
data[i] = pRxData;
}
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
这样子我们的基础读写函数就写好了
剩下的就是一些完善性的功能了,没有什么难度,赋上代码和效果图
bmi088.c
/**
* @Author : Minghang Li
* @Date : 2022-11-25 22:54
* @LastEditTime : 2022-11-28 16:32
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#include "bmi088.h"
#include <math.h>
#include "bmi088reg.h"
#include "gpio.h"
#include "spi.h"
bmi088_error_e BMI088_INIT(void) {
bmi088_error_e error = NO_ERROR;
BMI088_CONF_INIT();
error |= VerifyAccChipID();
error |= VerifyGyroChipID();
if (1) { // 将来改成变量控制自检
error |= VerifyAccSelfTest();
}
if (1) { // 将来改成变量控制自检
error |= VerifyGyroSelfTest();
}
return error;
}
void WriteDataToAcc(uint8_t addr, uint8_t data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr & BMI088_SPI_WRITE_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
pTxData = data;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_Delay(1);
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
void WriteDataToGyro(uint8_t addr, uint8_t data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr & BMI088_SPI_WRITE_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
pTxData = data;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_Delay(1);
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
void ReadSingleDataFromAcc(uint8_t addr, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
void ReadSingleDataFromGyro(uint8_t addr, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, data, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
void ReadMultiDataFromAcc(uint8_t addr, uint8_t len, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
uint8_t pRxData;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
for (int i = 0; i < len; i++) {
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
data[i] = pRxData;
}
HAL_GPIO_WritePin(BMI088_ACC_GPIOx, BMI088_ACC_GPIOp, GPIO_PIN_SET);
}
void ReadMultiDataFromGyro(uint8_t addr, uint8_t len, uint8_t *data) {
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_RESET);
uint8_t pTxData = (addr | BMI088_SPI_READ_CODE);
uint8_t pRxData;
HAL_SPI_Transmit(&BMI088_SPI, &pTxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_TX)
;
for (int i = 0; i < len; i++) {
HAL_SPI_Receive(&BMI088_SPI, &pRxData, 1, 1000);
while (HAL_SPI_GetState(&BMI088_SPI) == HAL_SPI_STATE_BUSY_RX)
;
data[i] = pRxData;
}
HAL_GPIO_WritePin(BMI088_GYRO_GPIOx, BMI088_GYRO_GPIOp, GPIO_PIN_SET);
}
void BMI088_CONF_INIT(void) {
// 加速度计初始化
// 先软重启,清空所有寄存器
WriteDataToAcc(ACC_SOFTRESET_ADDR, ACC_SOFTRESET_VAL);
HAL_Delay(50);
// 打开加速度计电源
WriteDataToAcc(ACC_PWR_CTRL_ADDR, ACC_PWR_CTRL_ON);
// 加速度计变成正常模式
WriteDataToAcc(ACC_PWR_CONF_ADDR, ACC_PWR_CONF_ACT);
// 陀螺仪初始化
// 先软重启,清空所有寄存器
WriteDataToGyro(GYRO_SOFTRESET_ADDR, GYRO_SOFTRESET_VAL);
HAL_Delay(50);
// 陀螺仪变成正常模式
WriteDataToGyro(GYRO_LPM1_ADDR, GYRO_LPM1_NOR);
// 加速度计配置写入
// 写入范围,+-3g的测量范围
WriteDataToAcc(ACC_RANGE_ADDR, ACC_RANGE_3G);
// 写入配置,正常带宽,1600hz输出频率
WriteDataToAcc(ACC_CONF_ADDR,
(ACC_CONF_RESERVED << 7) | (ACC_CONF_BWP_NORM << 6) | (ACC_CONF_ODR_1600_Hz));
// 陀螺仪配置写入
// 写入范围,+-500°/s的测量范围
WriteDataToGyro(GYRO_RANGE_ADDR, GYRO_RANGE_500_DEG_S);
// 写入带宽,2000Hz输出频率,532Hz滤波器带宽
WriteDataToGyro(GYRO_BANDWIDTH_ADDR, GYRO_ODR_2000Hz_BANDWIDTH_532Hz);
}
bmi088_error_e VerifyAccChipID(void) {
uint8_t chip_id;
ReadSingleDataFromAcc(ACC_CHIP_ID_ADDR, &chip_id);
if (chip_id != ACC_CHIP_ID_VAL) {
return ACC_CHIP_ID_ERR;
}
return NO_ERROR;
}
bmi088_error_e VerifyGyroChipID(void) {
uint8_t chip_id;
ReadSingleDataFromGyro(GYRO_CHIP_ID_ADDR, &chip_id);
if (chip_id != GYRO_CHIP_ID_VAL) {
return GYRO_CHIP_ID_ERR;
}
return NO_ERROR;
}
bmi088_error_e VerifyAccSelfTest(void) {
acc_raw_data_t pos_data, neg_data;
WriteDataToAcc(ACC_RANGE_ADDR, ACC_RANGE_24G);
WriteDataToAcc(ACC_CONF_ADDR, 0xA7);
HAL_Delay(10);
WriteDataToAcc(ACC_SELF_TEST_ADDR, ACC_SELF_TEST_POS);
HAL_Delay(100);
ReadAccData(&pos_data);
WriteDataToAcc(ACC_SELF_TEST_ADDR, ACC_SELF_TEST_NEG);
HAL_Delay(100);
ReadAccData(&neg_data);
WriteDataToAcc(ACC_SELF_TEST_ADDR, ACC_SELF_TEST_OFF);
HAL_Delay(100);
if ((fabs(pos_data.x - neg_data.x) > 0.1f) || (fabs(pos_data.y - neg_data.y) > 0.1f) || (fabs(pos_data.z - neg_data.z) > 0.1f)) {
return ACC_DATA_ERR;
}
WriteDataToAcc(ACC_SOFTRESET_ADDR, ACC_SOFTRESET_VAL);
WriteDataToAcc(ACC_PWR_CTRL_ADDR, ACC_PWR_CTRL_ON);
WriteDataToAcc(ACC_PWR_CONF_ADDR, ACC_PWR_CONF_ACT);
WriteDataToAcc(ACC_CONF_ADDR,
(ACC_CONF_RESERVED << 7) | (ACC_CONF_BWP_NORM << 6) | (ACC_CONF_ODR_1600_Hz));
WriteDataToAcc(ACC_RANGE_ADDR, ACC_RANGE_3G);
return NO_ERROR;
}
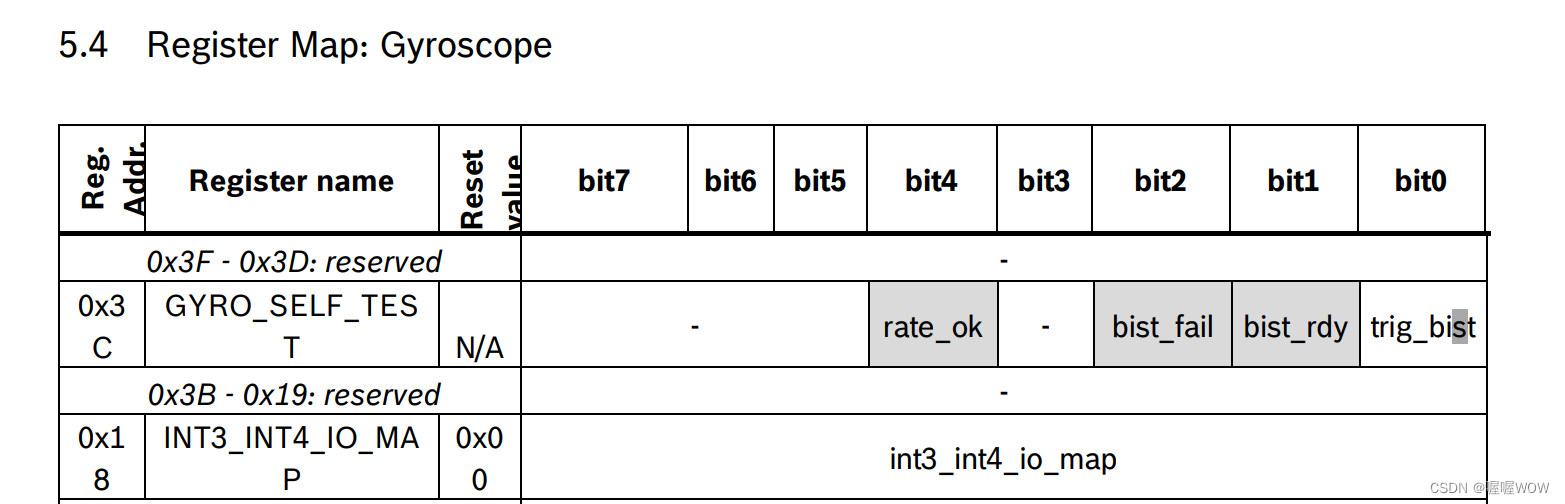
bmi088_error_e VerifyGyroSelfTest(void) {
WriteDataToGyro(GYRO_SELF_TEST_ADDR, GYRO_SELF_TEST_ON);
uint8_t bist_rdy = 0x00, bist_fail;
while (bist_rdy == 0) {
ReadSingleDataFromGyro(GYRO_SELF_TEST_ADDR, &bist_rdy);
bist_rdy = (bist_rdy & 0x02) >> 1;
}
ReadSingleDataFromGyro(GYRO_SELF_TEST_ADDR, &bist_fail);
bist_fail = (bist_fail & 0x04) >> 2;
if (bist_fail == 0) {
return NO_ERROR;
} else {
return GYRO_DATA_ERR;
}
}
void ReadAccData(acc_raw_data_t *data) {
uint8_t buf[ACC_XYZ_LEN], range;
int16_t acc[3];
ReadSingleDataFromAcc(ACC_RANGE_ADDR, &range);
ReadMultiDataFromAcc(ACC_X_LSB_ADDR, ACC_XYZ_LEN, buf);
acc[0] = ((int16_t)buf[1] << 8) + (int16_t)buf[0];
acc[1] = ((int16_t)buf[3] << 8) + (int16_t)buf[2];
acc[2] = ((int16_t)buf[5] << 8) + (int16_t)buf[4];
data->x = (float)acc[0] * BMI088_ACCEL_3G_SEN;
data->y = (float)acc[1] * BMI088_ACCEL_3G_SEN;
data->z = (float)acc[2] * BMI088_ACCEL_3G_SEN;
}
void ReadGyroData(gyro_raw_data_t *data) {
uint8_t buf[GYRO_XYZ_LEN], range;
int16_t gyro[3];
float unit;
ReadSingleDataFromGyro(GYRO_RANGE_ADDR, &range);
switch (range) {
case 0x00:
unit = 16.384;
break;
case 0x01:
unit = 32.768;
break;
case 0x02:
unit = 65.536;
break;
case 0x03:
unit = 131.072;
break;
case 0x04:
unit = 262.144;
break;
default:
unit = 16.384;
break;
}
ReadMultiDataFromGyro(GYRO_RATE_X_LSB_ADDR, GYRO_XYZ_LEN, buf);
gyro[0] = ((int16_t)buf[1] << 8) + (int16_t)buf[0];
gyro[1] = ((int16_t)buf[3] << 8) + (int16_t)buf[2];
gyro[2] = ((int16_t)buf[5] << 8) + (int16_t)buf[4];
data->roll = (float)gyro[0] / unit * DEG2SEC;
data->pitch = (float)gyro[1] / unit * DEG2SEC;
data->yaw = (float)gyro[2] / unit * DEG2SEC;
}
void ReadAccSensorTime(float *time) {
uint8_t buf[SENSORTIME_LEN];
ReadMultiDataFromAcc(SENSORTIME_0_ADDR, SENSORTIME_LEN, buf);
*time = buf[0] * SENSORTIME_0_UNIT + buf[1] * SENSORTIME_1_UNIT + buf[2] * SENSORTIME_2_UNIT;
}
void ReadAccTemperature(float *temp) {
uint8_t buf[TEMP_LEN];
ReadMultiDataFromAcc(TEMP_MSB_ADDR, TEMP_LEN, buf);
uint16_t temp_uint11 = (buf[0] << 3) + (buf[1] >> 5);
int16_t temp_int11;
if (temp_uint11 > 1023) {
temp_int11 = (int16_t)temp_uint11 - 2048;
} else {
temp_int11 = (int16_t)temp_uint11;
}
*temp = temp_int11 * TEMP_UNIT + TEMP_BIAS;
}
bmi088.h
/**
* @Author : Minghang Li
* @Date : 2022-11-25 22:54
* @LastEditTime : 2022-11-28 16:09
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#pragma once
#include <stdbool.h>
#include <stdint.h>
#include "bmi088reg.h"
#define BMI088_SPI hspi1
#define BMI088_ACC_GPIOx GPIOA
#define BMI088_ACC_GPIOp GPIO_PIN_4
#define BMI088_GYRO_GPIOx GPIOB
#define BMI088_GYRO_GPIOp GPIO_PIN_0
typedef struct acc_raw_data_t {
float x;
float y;
float z;
} acc_raw_data_t;
typedef struct gyro_raw_data_t {
float roll;
float pitch;
float yaw;
} gyro_raw_data_t;
typedef struct acc_data_t {
acc_raw_data_t acc_raw_data;
float sensor_time;
float temperature;
bool enable_self_test;
} acc_data_t;
typedef struct gyro_data_t {
gyro_raw_data_t gyro_raw_data;
bool enable_self_test;
} gyro_data_t;
typedef enum bmi088_error_e {
NO_ERROR = 0,
ACC_CHIP_ID_ERR = 0x01,
ACC_DATA_ERR = 0x02,
GYRO_CHIP_ID_ERR = 0x04,
GYRO_DATA_ERR = 0x08,
} bmi088_error_e;
typedef struct bmi088_data_t {
acc_data_t acc_data;
bmi088_error_e bmi088_error;
} bmi088_data_t;
// 基础函数
void WriteDataToAcc(uint8_t addr, uint8_t data);
void WriteDataToGyro(uint8_t addr, uint8_t data);
void ReadSingleDataFromAcc(uint8_t addr, uint8_t *data);
void ReadSingleDataFromGyro(uint8_t addr, uint8_t *data);
void ReadMultiDataFromAcc(uint8_t addr, uint8_t len, uint8_t *data);
void ReadMultiDataFromGyro(uint8_t addr, uint8_t len, uint8_t *data);
// 初始化函数
bmi088_error_e BMI088_INIT(void);
void BMI088_CONF_INIT(void);
// 功能函数
void ReadAccData(acc_raw_data_t *data);
void ReadGyroData(gyro_raw_data_t *data);
void ReadAccSensorTime(float *time);
void ReadAccTemperature(float *temp);
// 校验函数
bmi088_error_e VerifyAccChipID(void);
bmi088_error_e VerifyGyroChipID(void);
bmi088_error_e VerifyAccSelfTest(void);
bmi088_error_e VerifyGyroSelfTest(void);
bmi088reg.h
/**
* @Author : Minghang Li
* @Date : 2022-11-25 23:01
* @LastEditTime : 2022-11-28 16:32
* @Note :
* @Copyright(c) : Minghang Li Copyright
*/
#pragma once
#define BMI088_ACCEL_3G_SEN 0.0008974358974f
#define DEG2SEC 0.0174532925f
#define SEC2DEG 57.295779578f
#define PI 3.14159265f
/*-----bmi088的spi读取协议部分-----*/
#define BMI088_SPI_WRITE_CODE 0x7F
#define BMI088_SPI_READ_CODE 0x80
/*-----加速度计寄存器表-----*/
#define ACC_CHIP_ID_ADDR 0x00
#define ACC_CHIP_ID_VAL 0x1E
#define ACC_ERR_REG_ADDR 0x02
#define ACC_STATUS_ADDR 0x03
#define ACC_X_LSB_ADDR 0x12
#define ACC_X_MSB_ADDR 0x13
#define ACC_Y_LSB_ADDR 0x14
#define ACC_Y_MSB_ADDR 0x15
#define ACC_Z_LSB_ADDR 0x16
#define ACC_Z_MSB_ADDR 0x17
#define ACC_XYZ_LEN 6
#define SENSORTIME_0_ADDR 0x18
#define SENSORTIME_0_UNIT (39.0625f / 1000000.0f)
#define SENSORTIME_1_ADDR 0x19
#define SENSORTIME_1_UNIT (10.0 / 1000.0f)
#define SENSORTIME_2_ADDR 0x1A
#define SENSORTIME_2_UNIT (2.56f)
#define SENSORTIME_LEN 3
#define ACC_INT_STAT_1_ADDR 0x1D
#define TEMP_MSB_ADDR 0x22
#define TEMP_LSB_ADDR 0x23
#define TEMP_LEN 2
#define TEMP_UNIT 0.125f
#define TEMP_BIAS 23.0f
#define ACC_CONF_ADDR 0x40
#define ACC_CONF_RESERVED 0x01
#define ACC_CONF_BWP_OSR4 0x00
#define ACC_CONF_BWP_OSR2 0x01
#define ACC_CONF_BWP_NORM 0x02
#define ACC_CONF_ODR_12_5_Hz 0x05
#define ACC_CONF_ODR_25_Hz 0x06
#define ACC_CONF_ODR_50_Hz 0x07
#define ACC_CONF_ODR_100_Hz 0x08
#define ACC_CONF_ODR_200_Hz 0x09
#define ACC_CONF_ODR_400_Hz 0x0A
#define ACC_CONF_ODR_800_Hz 0x0B
#define ACC_CONF_ODR_1600_Hz 0x0C
#define ACC_RANGE_ADDR 0x41
#define ACC_RANGE_3G 0x00
#define ACC_RANGE_6G 0x01
#define ACC_RANGE_12G 0x02
#define ACC_RANGE_24G 0x03
#define INT1_IO_CTRL_ADDR 0x53
#define INT2_IO_CTRL_ADDR 0x54
#define INT_MAP_DATA_ADDR 0x58
#define ACC_SELF_TEST_ADDR 0x6D
#define ACC_SELF_TEST_OFF 0x00
#define ACC_SELF_TEST_POS 0x0D
#define ACC_SELF_TEST_NEG 0x09
#define ACC_PWR_CONF_ADDR 0x7C
#define ACC_PWR_CONF_SUS 0x03
#define ACC_PWR_CONF_ACT 0x00
#define ACC_PWR_CTRL_ADDR 0x7D
#define ACC_PWR_CTRL_ON 0x04
#define ACC_PWR_CTRL_OFF 0x00
#define ACC_SOFTRESET_ADDR 0x7E
#define ACC_SOFTRESET_VAL 0xB6
/*-----陀螺仪寄存器表-----*/
#define GYRO_CHIP_ID_ADDR 0x00
#define GYRO_CHIP_ID_VAL 0x0F
#define GYRO_RATE_X_LSB_ADDR 0x02
#define GYRO_RATE_X_MSB_ADDR 0x03
#define GYRO_RATE_Y_LSB_ADDR 0x04
#define GYRO_RATE_Y_MSB_ADDR 0x05
#define GYRO_RATE_Z_LSB_ADDR 0x06
#define GYRO_RATE_Z_MSB_ADDR 0x07
#define GYRO_XYZ_LEN 6
#define GYRO_INT_STAT_1_ADDR 0x0A
#define GYRO_RANGE_ADDR 0x0F
#define GYRO_RANGE_2000_DEG_S 0x00
#define GYRO_RANGE_1000_DEG_S 0x01
#define GYRO_RANGE_500_DEG_S 0x02
#define GYRO_RANGE_250_DEG_S 0x03
#define GYRO_RANGE_125_DEG_S 0x04
#define GYRO_BANDWIDTH_ADDR 0x10
#define GYRO_ODR_2000Hz_BANDWIDTH_532Hz 0x00
#define GYRO_ODR_2000Hz_BANDWIDTH_230Hz 0x01
#define GYRO_ODR_1000Hz_BANDWIDTH_116Hz 0x02
#define GYRO_ODR_400Hz_BANDWIDTH_47Hz 0x03
#define GYRO_ODR_200Hz_BANDWIDTH_23Hz 0x04
#define GYRO_ODR_100Hz_BANDWIDTH_12Hz 0x05
#define GYRO_ODR_200Hz_BANDWIDTH_64Hz 0x06
#define GYRO_ODR_100Hz_BANDWIDTH_32Hz 0x07
#define GYRO_LPM1_ADDR 0x11
#define GYRO_LPM1_NOR 0x00
#define GYRO_LPM1_SUS 0x80
#define GYRO_LPM1_DEEP_SUS 0x20
#define GYRO_SOFTRESET_ADDR 0x14
#define GYRO_SOFTRESET_VAL 0xB6
#define GYRO_INT_CTRL_ADDR 0x15
#define GYRO_INT3_INT4_IO_CONF_ADDR 0x16
#define GYRO_INT3_INT4_IO_MAP_ADDR 0x18
#define GYRO_SELF_TEST_ADDR 0x3C
#define GYRO_SELF_TEST_ON 0x01
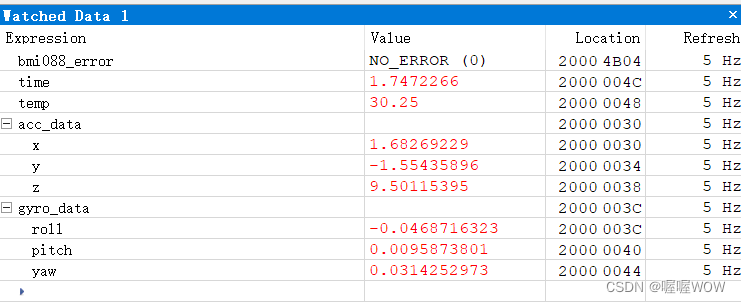
效果如下
最后
以上就是斯文毛衣最近收集整理的关于【超详细】基于大疆RoboMaster开发板C型的BMI088数据读取【超详细】基于大疆RoboMaster开发板C型的BMI088数据读取的全部内容,更多相关【超详细】基于大疆RoboMaster开发板C型内容请搜索靠谱客的其他文章。








发表评论 取消回复