(一)时钟信号特性有:抖动(Jitter)、偏移(skew)、占空比失真(Duty Cycle Distortion)
1.偏移SKEW
因时钟线长度不同或负载不同,导致时钟到达相邻单元的时间不同,这个时间上的偏差就叫时钟偏移SKEW。
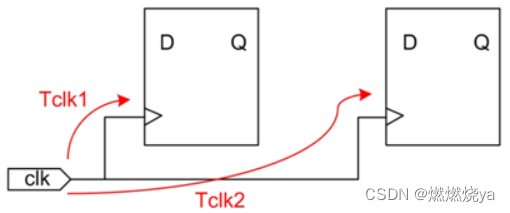
在上图中的Tskew=Tc1-Tc2
偏移会一直存在,因此FPGA在设计时,会进行优化,采用全铜工艺和树状结构,设计专门的始终缓冲和驱动网络,使得时钟到达不同单元时的路径一样长,尽量减小偏移。
所以,Skew 问题的解决方法就是:设计中的主要信号应该走全局时钟网络。
此外FPGA中延迟锁定环(Delay locked ring,DLL)也可以去SKEW,延迟锁相环由控制逻辑和延时线组成,控制逻辑将输入时钟与输出时钟进行比较,并插入延时从而使得时钟同步。
但无论如何,在STA时,任然要考虑Skew。
2.抖动Jitter
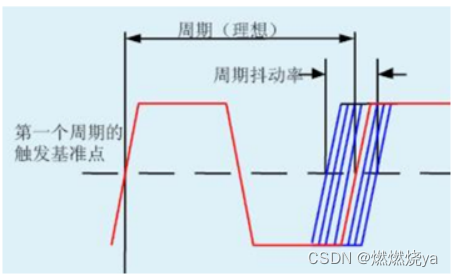
在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns有一个跳变沿。但这种信号并不存在。如图所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。这种不确定就是抖动(jitter)。时钟抖动也永远存在。
 3.占空比失真Duty Cycle Distortion
3.占空比失真Duty Cycle Distortion
占空比失真即时钟不对称,高电平和低电平时间发生变化。DCD会占用时间裕量(Slack)造成数字信号的失真,使过零区间偏离理想的位置。DCD通常是由信号的上升沿和下降沿之间时序不同而造成的。
(二)扇入扇出Fan-in/Fan-out
数字电路中,逻辑门相互连接,每个逻辑门输出端与输入端都连着大量别的单元,因此由扇入扇出表示处理外部输入以及驱动外部其他单元的能力。
1.亚稳态及相关概念
同步电路中:
建立时间(Setup time):触发器时钟上升沿到来前数据保持稳定的时间。
保持时间(Hold time):触发器时钟上升沿到来后数保持据稳定的时间。
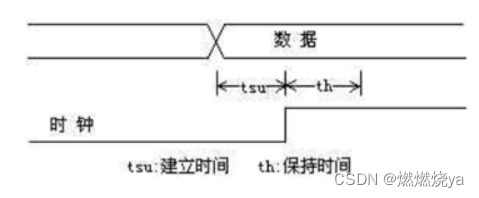
如图所示,在时钟上升沿到来前后的一段时间内数据必须保持稳定,否则数据就无法写入,造成“亚稳态“输出。如果前级驱动够强劲,电路就能按照趋势变化下去,一定时间后该点的值就会变化为“正确值”,如果驱动不够强劲,电路就会恢复之前的值,最终得到何值是不可控的,所以我们要避免亚稳态。在使用DFF时,必须满足其建立时间和保持时间的要求。
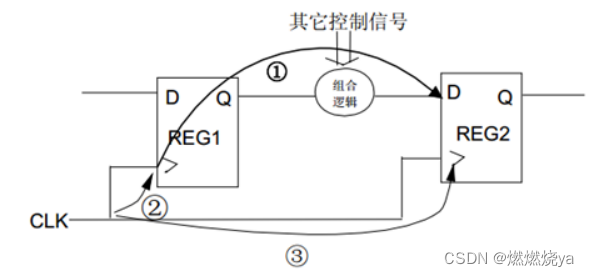
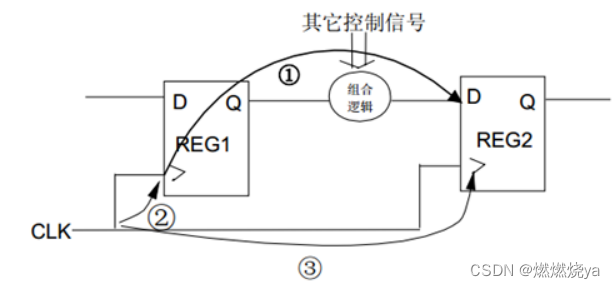
以上图为例,假设时序如下
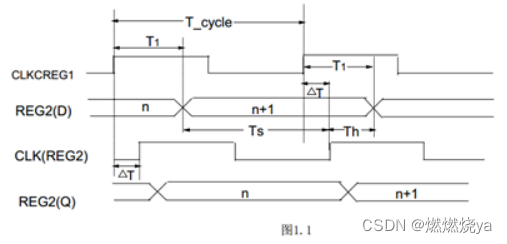
在上图时序中:
△T=Tskew(skew和时钟抖动jitter有区别)
T1=REG1检测到时钟后内部延时+组合逻辑延时最后到达REG2的时间
Tcycle=CLK的周期
Tsu=数据在CLK2上升沿到达前维持的时间
Tsu = Tcycle + Tskew-T1
Th=数据在CLK上升沿到达后维持的时间
Th = T1 – Tskew
如果Ts>setup time(触发器),Th>hold time(触发器)则数据能正常写入,由这个条件可以看出,Tskew与T1起着关键作用,而正之前所说如果使用全局时钟则Tskew会很小,可以忽略不计。
实例:
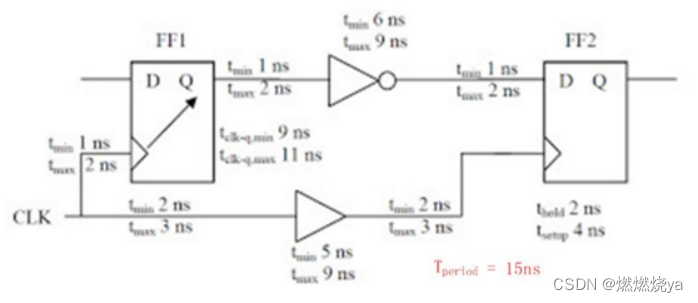
以上图为例Tsu= Tcycle + Tskew-T1要使Tsu最小,则Tskew最小,T1最大。
Tsu(min) = Tcycle + Tskew(min)-T1(max)=15+2+5+2-2-11-2-9-2<Tsetup
因此发生了setup violation
2.异步复位时:
除了同步电路中会产生亚稳态外(不满足Tsu和Th),在异步复位时也会产生亚稳态,这里需要提到复位时间与撤销时间。
复位时间(recovery):复位信号释放(对于低电平有效的复位信号指上升沿),与紧跟其后的第一个时钟上升沿之间的最小时间。
撤销时间(removal):时钟信号的上升沿,与紧跟其后异步复位信号从有效到无效的最小时间。
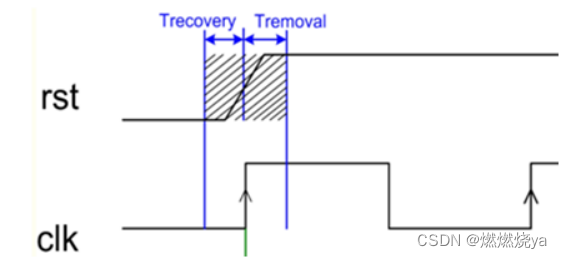
如图所示,异步复位信号撤销必须在复位时间和撤销时间外,否则会产生亚稳态。
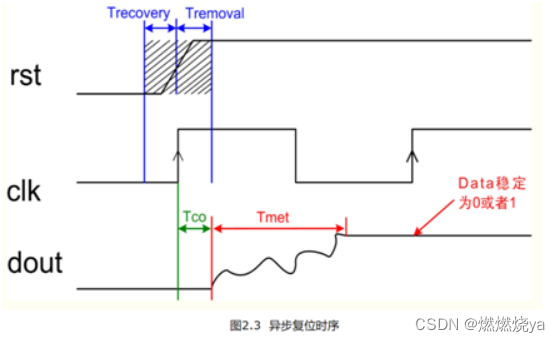
异步复位信号撤销时间在Trecovery和Tremoval之内,则会造成亚稳态,在时钟上升沿Tco(输出延时)后会产生振荡,振荡时间为Tmet(决断时间)。
- 寄存器中的亚稳态
1.只要系统中有异步元件,亚稳态就是无法避免的,亚稳态主要发生在异步信号检测、跨时钟域信号传输中。
2.对于同步信号而言不满足Tsu和Th会产生亚稳态,对于异步信号,复位不满足Trecovery和Tremoval会产生亚稳态。
3.随着clk频率的增加,亚稳态发生的几率是增加的。
4.采用工艺更好的FPGA。
消除亚稳态方法:
1.对异步信号进行同步处理;
2.使用FIFO对跨时钟域数据进行缓冲处理;
3.复位电路采用异步复位,同步释放处理;
(四)时间裕量Slack
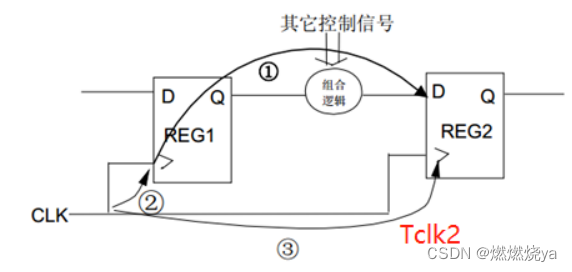
1.时间裕量分析首先需要将电路中的路径找出来。路径的起点有两种:时序器件的时钟输入端、电路的起点;终点也有两种:时序器件的数据输入端、电路的终点。如下图所示,一共有四种路径。
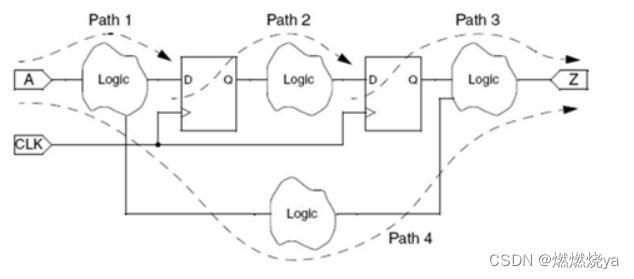
除了路径外还有以下几个概念需要了解:
关键路径(critical path):从输入到输出中延时最大的那条路径。
到达时间(arrival time):信号从参考的时间起到达某特点位置的时间。
需求时间(required time):信号到达的最晚的时间。
时间裕量(slack):用需要时间减去到达时间得到的结果就是时间裕量(slack =required time- arrival time)。如果时证书则说明路径延时满足需求,如果时负数则说明延时不满足。其中比较重要的时Hold Time Slack。
计算:
仍然以该电路为例
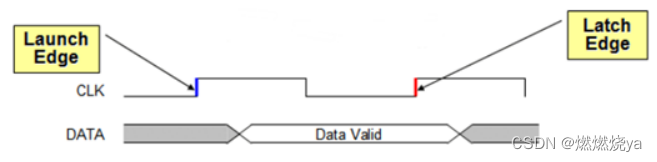
发射沿(Launch Edge):产生数据的REG1的clock上升沿;
锁存沿(Latch Edge):接受数据的REG2的clock的上升沿,延时Launch Edge1个时钟;
数据到达时间(Data Arrival Time)
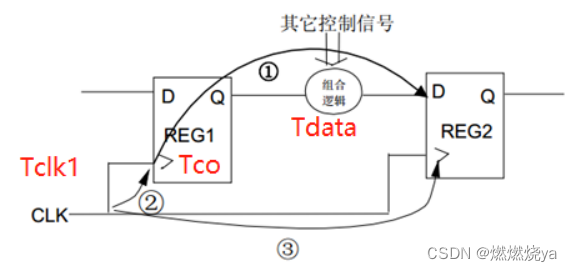
Tclk1= CLK到达REG1的时间
Tco = REG1固定延时
Tdata= 数据传输时间
时序图如下:
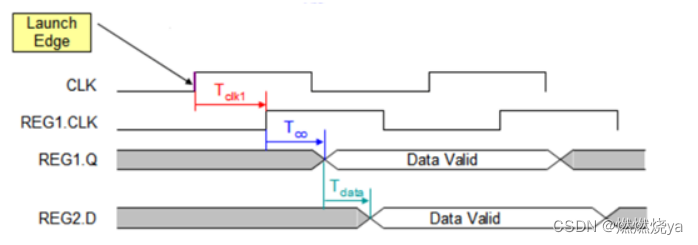
Data Arrival Time = Launch Edge+Tclk1+Tco+Tdata
时钟到达时间(Clock Arrival Time)
时序图如下:
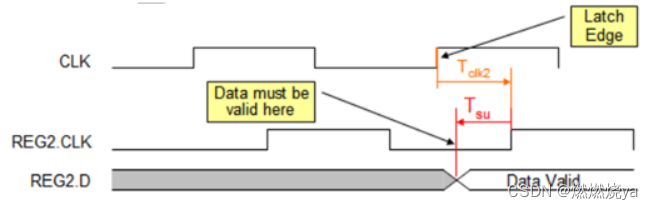
Clock Arrival Time = latch Edge+Tclk2
数据建立需求时间(Data Required Time Setup)
因为数据必须在Tsu之前有效,因此:
Data Required Time Setup = Clock Arrival Time-Tsu
数据保持需求时间(Data Required Time Hold)
因为数据必须在Th之后才能改变,因此:
Data Required Time Hold= Clock Arrival Time+Th
最后计算Slack
Setup Slack = Data Required Time Setup -Data Arrival Time
Hold Slack = Clock Arrival Time - Data Required Time Hold
(五)Cell延时
我们都知道在数字IC设计流程中cell(std,IO,IP)的时序(timing)、面积(area)、功能(functionality)和功耗(power)信息都包含在lib库里面,其中时序信息最为关键。
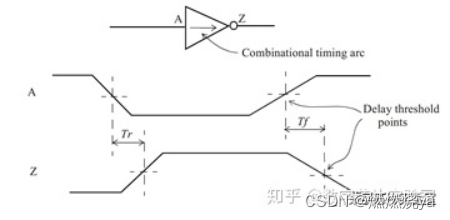
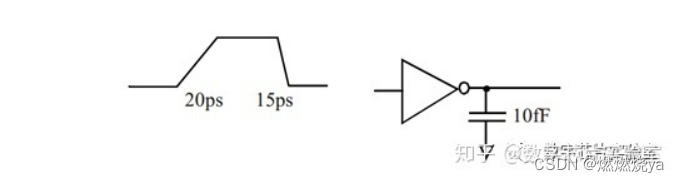
以最简单的反相器为例,所谓cell的时序信息,即图中的传播延时Tr和Tf
• Tr : Output rise delay
• Tf : Output fall delay
反相器cell的延时取决于两个因素:
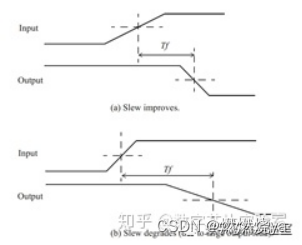
输出负载(output load),即输出引脚的电容负载输入信号的过渡时间(input transition time)
延迟值与负载电容直接相关。负载电容越大,延迟越大。
在大多数情况下,延迟随着输入transition time的增加而增加,但是延迟和输入transitiontime并不总是单调关系,尤其是在输出负载较小的情况下。
输出的transition time主要取决于输出电容,随输出负载而增加。因此,较大的输入transition time可以根据cell的类型及其输出负载不同得到改善。
早期的延时建模采用简单的线性延迟模型(linear delay model),其中延迟是input transition time和output load capacitance两者的线性函数,其一般形式如下所示:
D = D0 +D1 * S + D2 * C
其中D0,D1,D2是常数,S是inputtransition time,C是output load capacitance。
线性延迟模型在亚微米工艺下不太准确,因此目前大多数lib库使用更复杂的模型,例如非线性延迟模型(non-lineardelay model)。
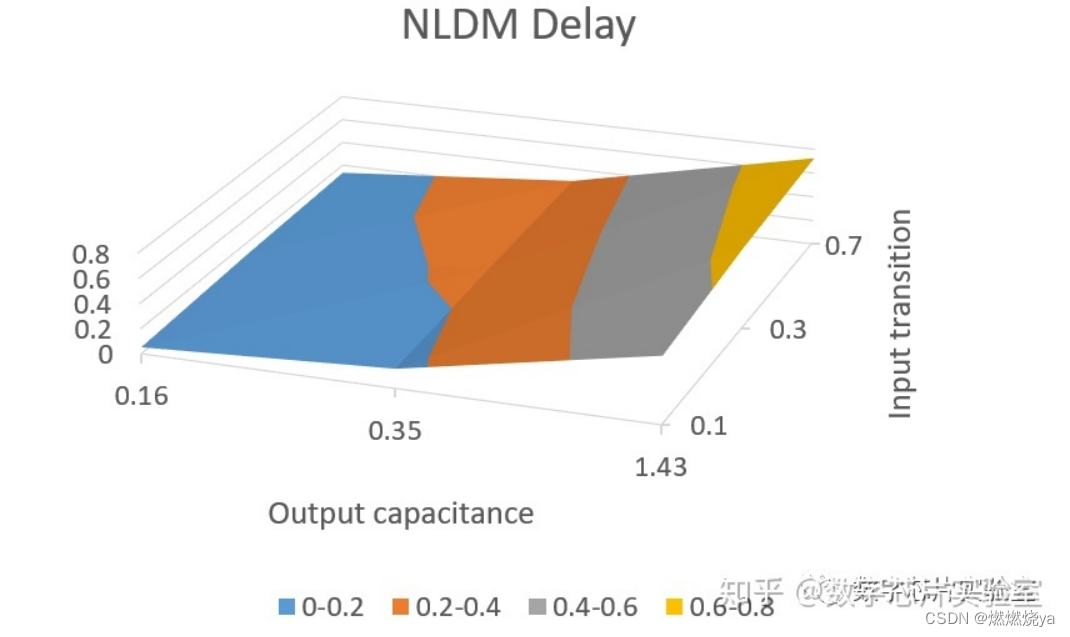
Non-LinearDelay Model
大多数lib库都包括查找表模型(table models),例如NLDM(非线性延迟模型),为cell的各种时序弧(timing arcs)指定延迟,output transition和其他时序检查等信息。
• Risedelay
• Fall delay
• Rise transition
• Fall transition
LDM根据input transition time和output capacitance获得cell的不同timing arcs的延迟。也就是说,NLDM模型是一个二维的查找表,其中两个输入变量是inputtransition time和output capacitance,表中的内容是该timing arcs的延迟。
lu_table_template(delay_template_3x3) {
variable_1 : input_net_transition;
variable_2 :total_output_net_capacitance;
index_1 ("1000, 1001,1002");
index_2 ("1000, 1001,1002");
}/* The input transition and the output capacitance can be
in either order, that is, variable_1 can be the output
capacitance. However, these designations are usually
consistent across all templates in a library. */
上面的查找表模板指定表中的第一个行索引变量是input transition time,第二个列索引变量是output capacitance。索引值(1000, 1001, 1002)只是模板,会被实际索引值覆盖。
下面是实际的NLDM
pin(OUT) {
max_transition : 1.0;
timing() {
related_pin : "INP1";
timing_sense : negative_unate;
cell_rise(delay_template_3x3) {
index_1 ("0.1, 0.3, 0.7");/* Input transition */
index_2 ("0.16, 0.35,1.43"); /* Output capacitance */
values ( /* 0.16 0.35 1.43 */
/* 0.1 */ "0.0513, 0.1537, 0.5280",
/* 0.3 */ "0.1018, 0.2327, 0.6476",
/* 0.7 */ "0.1334, 0.2973, 0.7252");
}
cell_fall(delay_template_3x3) {
index_1 ("0.1, 0.3, 0.7");/* Input transition */
index_2 ("0.16, 0.35,1.43"); /* Output capacitance */
values ( /* 0.16 0.35 1.43 */
/* 0.1 */ "0.0617, 0.1537, 0.5280",
/* 0.3 */ "0.0918, 0.2027, 0.5676",
/* 0.7 */ "0.1034, 0.2273, 0.6452");
}
在上面的例子中,描述了输出引脚OUT分别在上升(cell_rise)和下降(cell_fall)的从引脚INP1到引脚OUT的延迟。还指定了输出引脚OUT的max_transition。查找表模板已经在delay_template_3x3中描述。
表中的timing_sense : negative_unate表示输入的翻转和输出翻转是相反的关系,即
input rise -> output fall
input fall -> output rise
根据延迟表,对于反相器的cell_rise延迟,input transition(fall) time为0.3ns,output load为0.16pf 时,对应延迟为0.1018ns。
NLDM模型不仅用于延迟,而且还用于指定output transition time,该值也是以input transition time和output load为索引变量的查找表。
pin(OUT) {
max_transition : 1.0;
timing() {
related_pin : "INP";
timing_sense : negative_unate;
rise_transition(delay_template_3x3) {
index_1 ("0.1, 0.3, 0.7");/* Input transition */
index_2 ("0.16, 0.35,1.43"); /* Output capacitance */
values ( /* 0.16 0.35 1.43 */
/* 0.1 */ "0.0417, 0.1337, 0.4680",
/* 0.3 */ "0.0718, 0.1827, 0.5676",
/* 0.7 */ "0.1034, 0.2173, 0.6452");
}
fall_transition(delay_template_3x3) {
index_1 ("0.1, 0.3, 0.7");/* Input transition */
index_2 ("0.16, 0.35,1.43"); /* Output capacitance */
values ( /* 0.16 0.35 1.43 */
/* 0.1 */ "0.0817, 0.1937, 0.7280",
/* 0.3 */ "0.1018, 0.2327, 0.7676",
/* 0.7 */ "0.1334, 0.2973, 0.8452");
}. . .
}
. . .
}
最后
以上就是忧虑蓝天最近收集整理的关于数电基础知识的全部内容,更多相关数电基础知识内容请搜索靠谱客的其他文章。








发表评论 取消回复