文章目录
- 一、Simulink—PMSM电机模块介绍
- 1、PMSM模块位置
- 2、PMSM模块配置(Configuration)
- 3、参数设置(Parameters)
- 4、高级设置(Advanced)
- 5、模块的使用
- 7、PMSM的常用方法
- 7.1、使用Universal Bridge模块输出三相电压
- 7.2、使用step模块,产生PMSM的负载转矩
- 7.3、使用bus selector模块输出电机模型的输出信号
一、Simulink—PMSM电机模块介绍
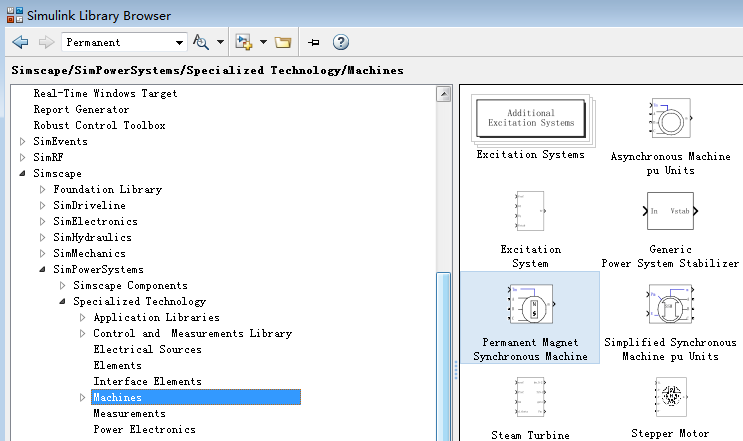
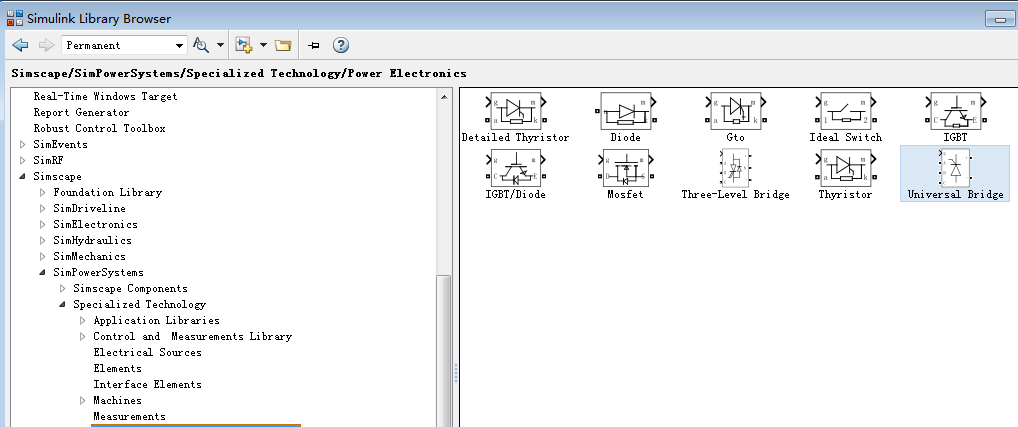
1、PMSM模块位置
2、PMSM模块配置(Configuration)
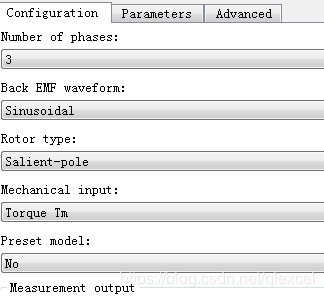
- Number of phases(相数):里面包含“3”和“5”两个选项。当选择“3”时表示为三相PMSM,当选择“5”时表示为五相PMSM。
- Back EMF waveform(反电动势波形):里面包含Sinusoidal和Trapezoidal两个选项。选择Sinusoidal表示此PMSM反电动势为正弦波,选择Trapezoidal表示此PMSM反电动势为梯形波。
- Rotor type(转子类型):里面包含Round和Salient-pole两个选项。选择Salient-pole表示电机转子为凸极型,选择Round表示电机转子表贴型。
- Mechanical input(机械输入方式):里面包含Torque Tm、Speed和Mechanical rotational三个选项。其中,较为常用的是前两个,Torque Tm表示负载转矩,Speed表示机械角速度。
- Preset model(电机的类型):里面包含No和各种功率等级的电机选项。当选择No时,可以对电机的参数进行修改;当选择其他类型的电机时,电机参数已经确定,将不能对电机的参数进行设置。
3、参数设置(Parameters)
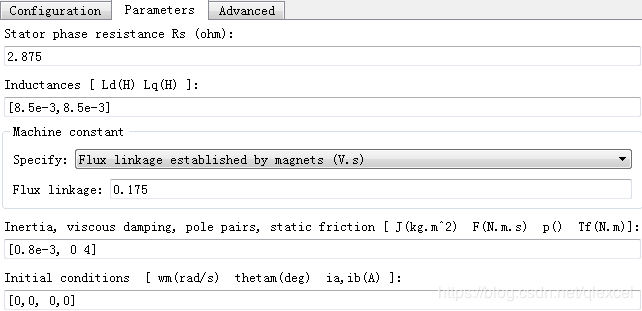
- Stator phase resistance Rs(ohm)(定子相电阻):设置电机定子相电阻的大小,单位为Ω。
- Inductances[Ld(H)Lq(H)](定子电感):设置电机定子电感的大小,单位为H。
- Machine constant(电机常量值):当Specify选择Flux linkage established by magnets(V.s)时,可以对Flux linkage(永磁体磁链)进行设置大小,单位为Wb;当Specify 选择Voltage Constant时,可以对Voltage Constant进行设置大小,单位为V/krpm;当Specify 选择Torque Constant 时,可以对Torque Constant进行设置大小,单位为N·m。
- Inertia, viscous damping, pole pairs, static friction [J(kg.m"2)F(N.m.s)p() Tf(N.m)]:可以分别设置电机的Inertia(转动惯量)、viscous damping(阻尼系数)、pole pairs(极对数)和static friction(静摩擦力),viscous damping通常设置为0。
- Initial conditions[wm(rad/s)thetam(deg)ia,ib(A)](电机的初始状态):可以设置包括机械角速度、转子位置、相电流ia和ib在内的数值大小。
4、高级设置(Advanced)
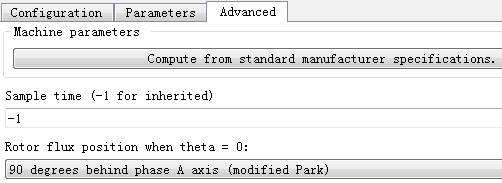
- Sample time(-1 for inherited):可以对采样时间进行设置,当powergui设置为continues时,默认为-1,表示采用内部的采样时间;当powergui设置为discrete时,可以对采样时间进行设置。
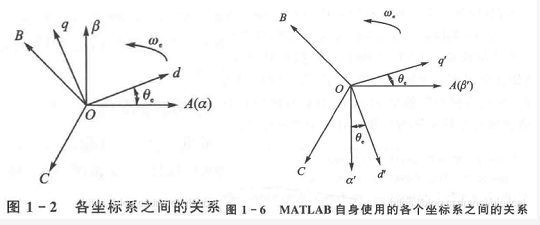
- Rotor flux position when theta=0:此处用来设置同步旋转坐标系的选择。当选择Aligned with phase A axis(original Park)时,表示同步旋转坐标系采用的是前面所讲的书本上常用坐标系(见图1-2);当选择90degrees behind phase A axis(modified Park)时,表示同步旋转坐标系采用的是MATLAB自身所采用的坐标系(见图1-6)。
5、模块的使用
-
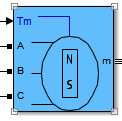
模块有4个输入和一组输出。A、B、C是电机模块的3根相线,一般接三相逆变桥。
-
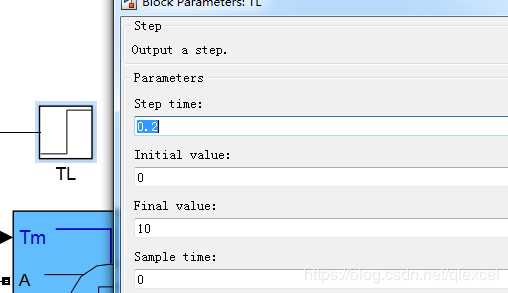
Tm输入是电机的负载扭矩,相当于此电机模块的负载。可以接入常数模块,也可以接入变化信号, 模拟负载的变化。
-
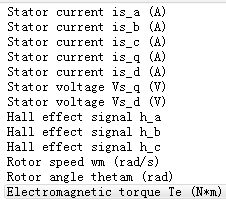
m输出组,包含了电机模块的各种输出信号:
-
-
is_a、is_b、is_c:3相电流值,以A为单位,是带正负的实际电流大小,可以直接使用。
-
Rotor speed wm:电机角速度(以rad/s为单位,要转换为RPM转速,需要除以2*PI,再乘以60)。
-
Rotor angle thetam:电机转子角度,这个是0-360度范围的,可以直接用来进行clark、park变换。(注意:参数表示的是转子的角度,如果转化为电角度,则需乘以极对数再,进行FOC计算)。
-
电机输出扭矩,单位N*m。
-
h_a、h_b、h_c:霍尔信号输出,反电动势过零点后,再过30°的电角度时霍尔跳变。
7、PMSM的常用方法
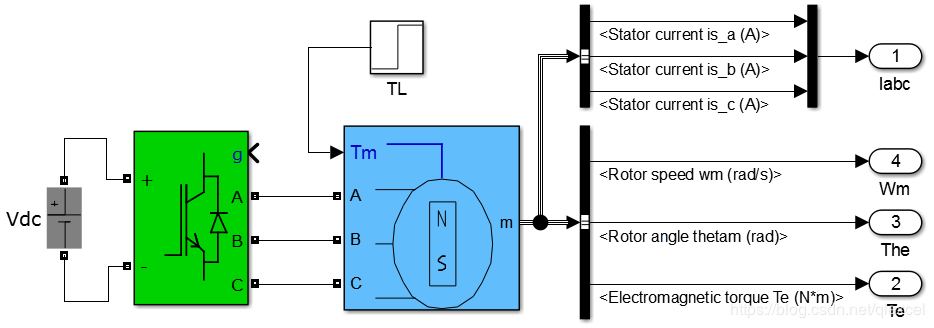
7.1、使用Universal Bridge模块输出三相电压
7.2、使用step模块,产生PMSM的负载转矩
7.3、使用bus selector模块输出电机模型的输出信号

本文部分内容来自《现代永磁同步电机控制原理及MATLAB仿真》袁雷编著
最后
以上就是哭泣西装最近收集整理的关于Simulink—PMSM电机模块介绍的全部内容,更多相关Simulink—PMSM电机模块介绍内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复