L1 = Link([0 12.4 0 pi/2 0 -pi/2]);
L2 = Link([0 0 0 -pi/2 0 0]);
L3 = Link([0 15.43 0 pi/2 0 0]);
L4 = Link([0 0 0 -pi/2 0 0]);
L5 = Link([0 15.925 0 pi/2 0 0]);
L6 = Link([0 0 0 -pi/2 0 0]);
L7 = Link([0 15.0 0 0 0 pi/2]);
% L8 = Link([0 13 0 0 0 0]);
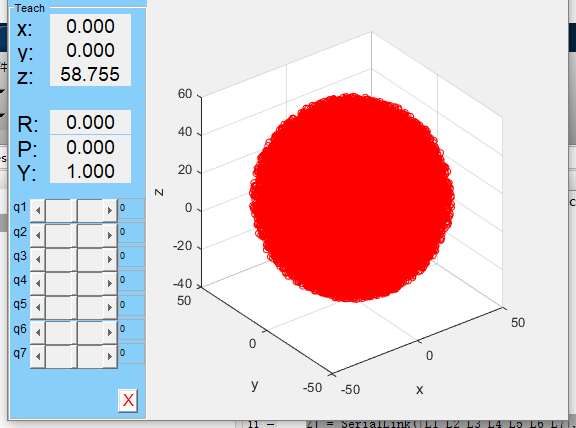
ZJ = SerialLink([L1 L2 L3 L4 L5 L6 L7],'name','7自由度机器人');
ZJ.teach(); %可以自由拖动的关节角度
% q0=[0 0 0 0 0 0 0];
% q1 = [3*pi .1745 pi/3 pi/2 .5236 pi/1.5 0];
% ZJ.plot(q0, 'floorlevel',-10);
n = 100000; %点的个数
x=zeros(n,1);
y=zeros(n,1);
z=zeros(n,1);
for i=1:n
q = get_num(-pi,pi,7); %function num = get_num(a,b,n)
%num = a + (b-a)*rand(n,1);
T = fkine(ZJ, q); %获得T阵
x(i) = T(1,4);
y(i) = T(2,4);
z(i) = T(3,4);
end
plot3(x,y,z,'ro','MarkerSize',5) %
xlabel('x')
ylabel('y')
zlabel('z')
grid on
最后
以上就是悲凉小甜瓜最近收集整理的关于Matlab 机器人工具箱 机械臂工作空间仿真的全部内容,更多相关Matlab内容请搜索靠谱客的其他文章。








发表评论 取消回复