任务
使用 matlab 的 robotics toolbox 完成5自由机械臂的建模与运动学仿真。并计算8个点的运动轨迹并绘制运动动画动画。
第一步 DH建模
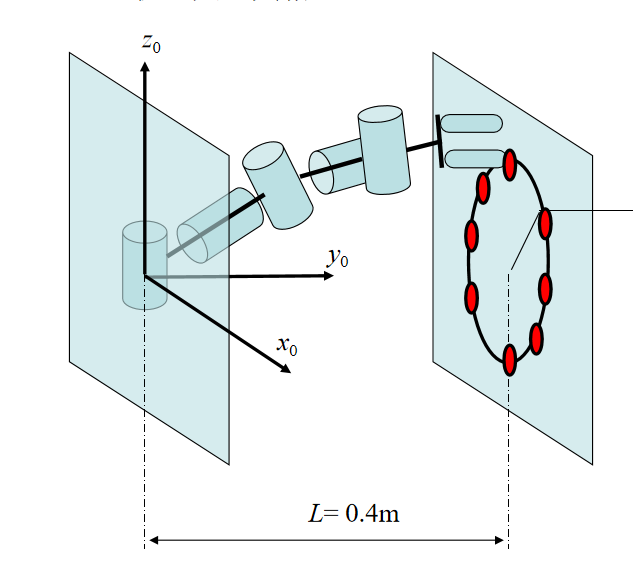
首先,我们先来分析机器人的图纸,来建立一下机器人的DH参数。
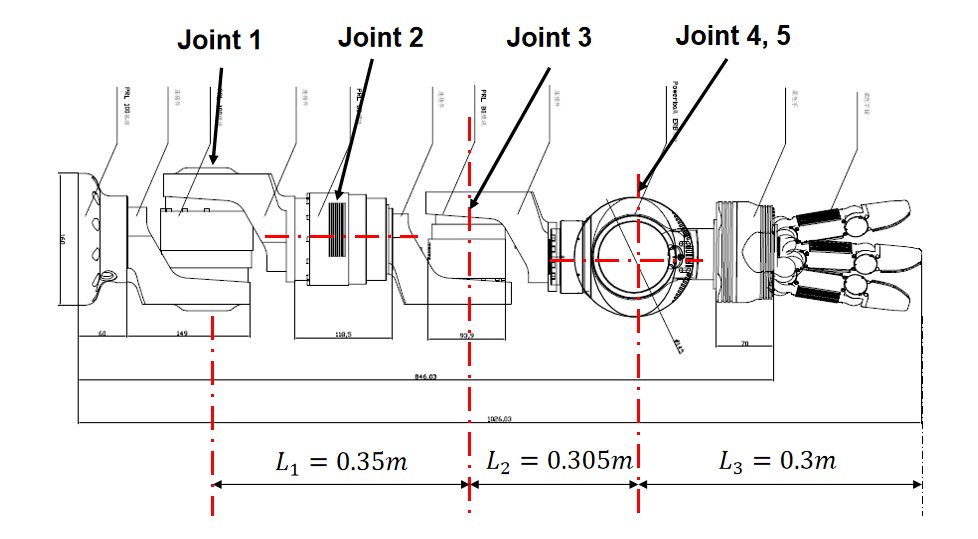
机器人包含5个关节
我们建立以下的DH参数表。
| 连杆 | a i − 1 a_{i-1} ai−1 | α i − 1 alpha_{i-1} αi−1 | d i d_i di | θ i theta_i θi |
|---|---|---|---|---|
| 0 | 0 | 0 | 0 | θ 1 theta_1 θ1 |
| 1 | 0 | π / 2 pi/2 π/2 | L1 | θ 2 theta_2 θ2 |
| 2 | 0 | − π / 2 -pi/2 −π/2 | 0 | θ 3 theta_3 θ3 |
| 3 | 0 | π / 2 pi/2 π/2 | L2 | θ 4 theta_4 θ4 |
| 4 | 0 | − π / 2 -pi/2 −π/2 | 0 | θ 5 theta_5 θ5 |
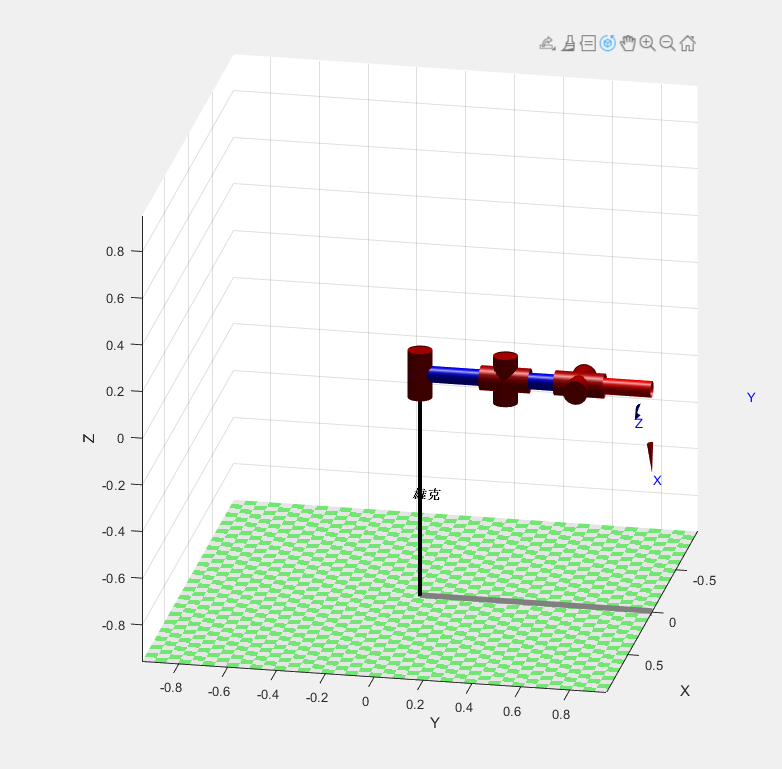
连杆的参数建完之后,我们写一下代码,在matlab中看看效果
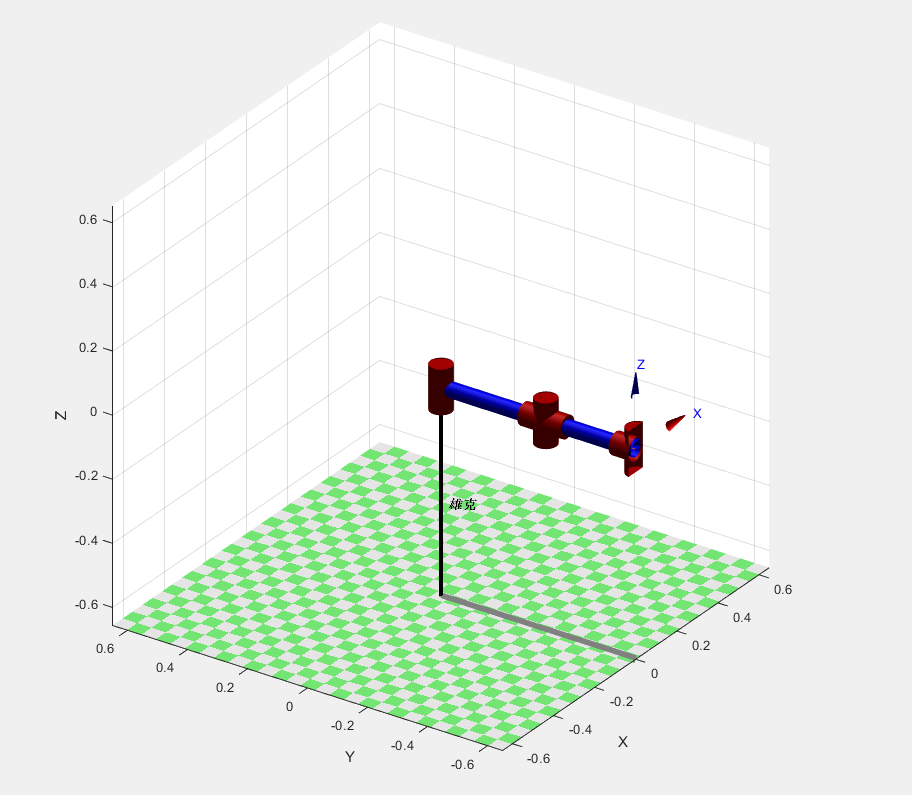
发现我们末端执行器没有,这怎么办呢?
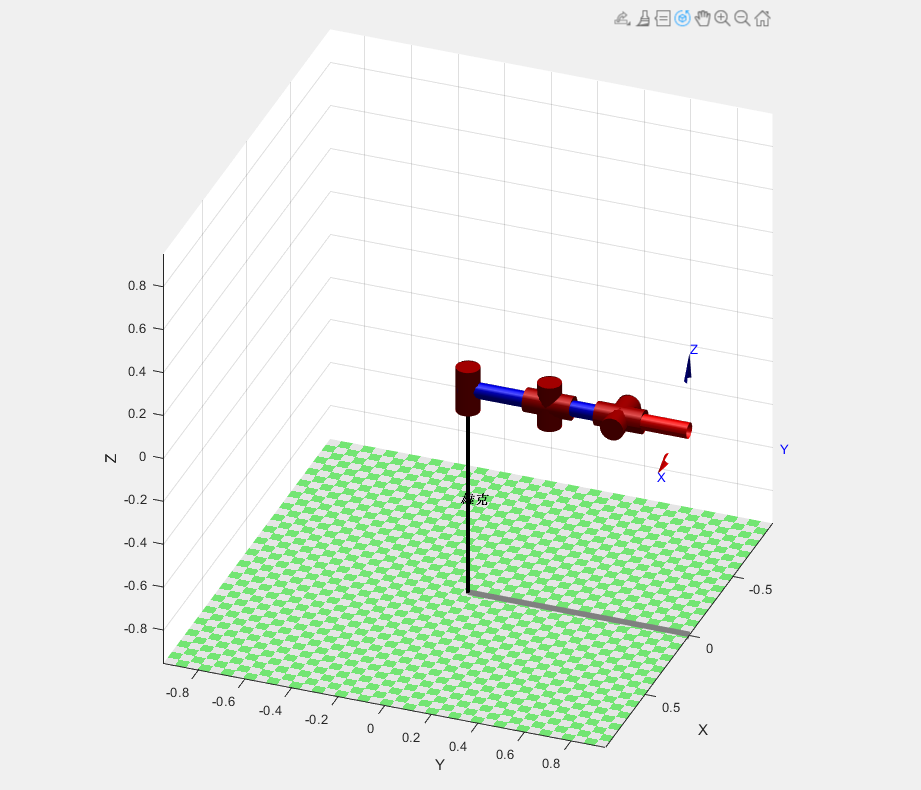
我们需要为SerialLink 指定一下 tool
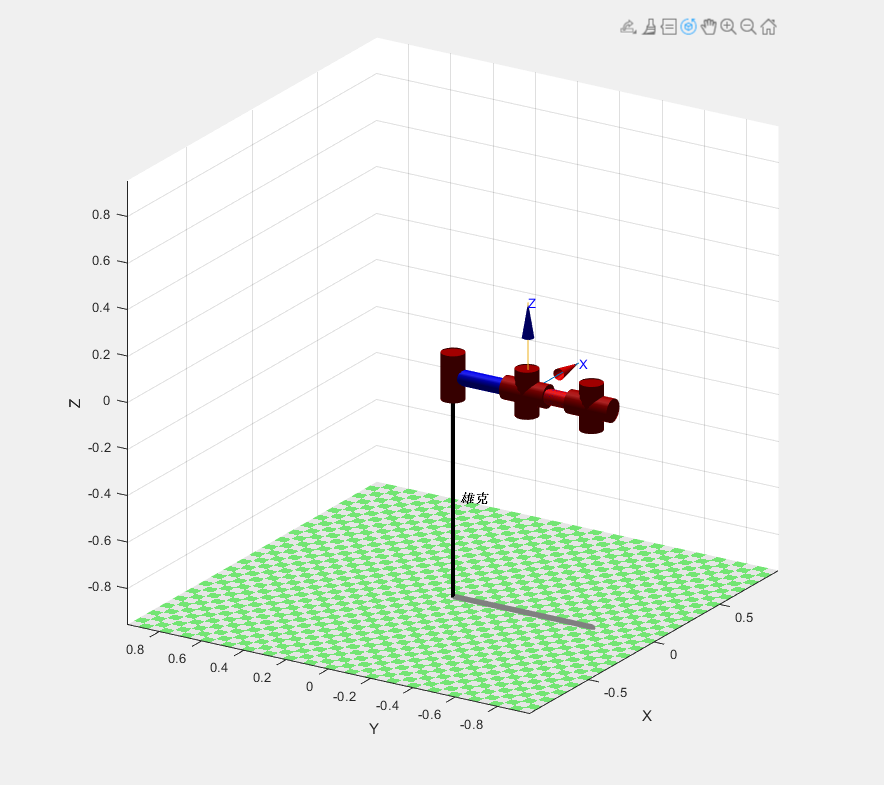
发现末端执行器反方向了,我们把Link5的方向调整一下,增加一个offset,转180°。
这时候发现已经大致和我们想要的模型差不多了
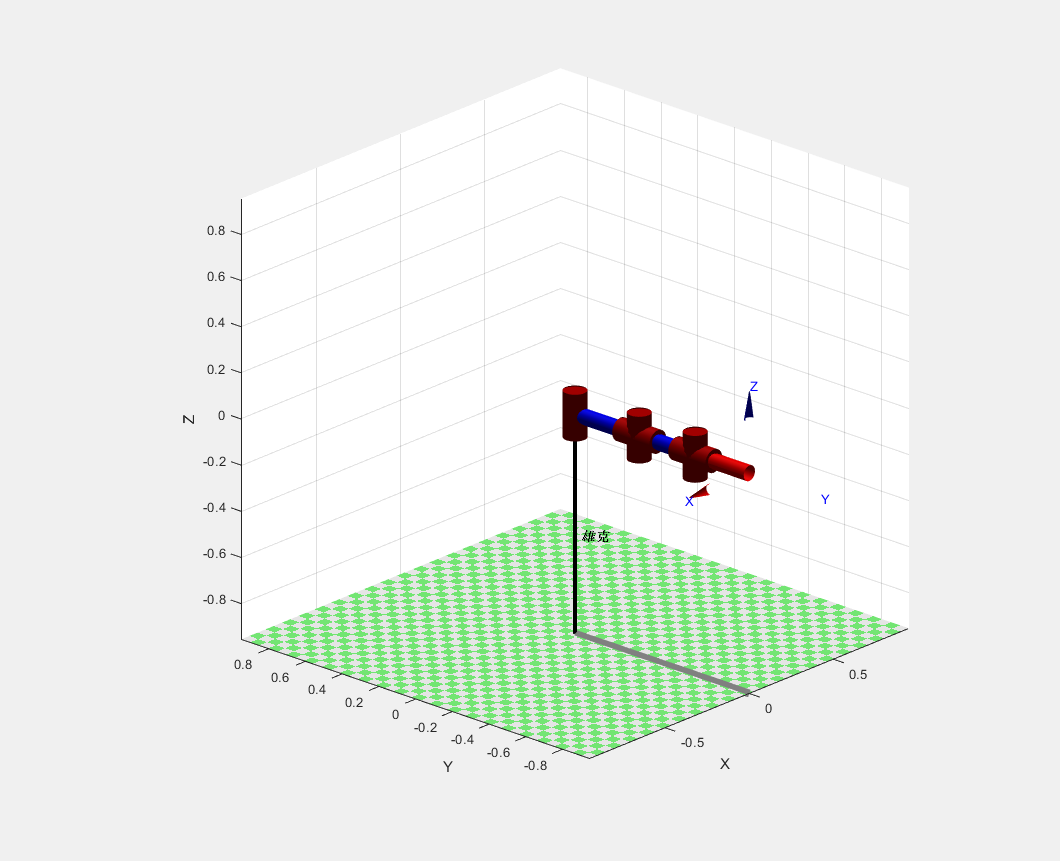
但在坐标上还存在一下差别。
我们给机器人转个方向,通过设置base来完成,也可以通过给Link1添加一个offset来实现
在把Link5的关节转一下,通过设置Link4的offset来实现
最后我们在把机械臂末端的坐标系转到与世界坐标系平行的形式
这样就得到了和题目中一样的方式了。
第二步 绘制目标点
这一步就很简单,我们只需要 将 问题中的目标点绘制出来就行,通过一个for循环就能实现。
第三步 逆运动学
逆运动学就是已知机器人末端的位姿,然后反解 机器人的关节角度。
robotics toolbox提供了六自由度机械臂的反解函数ikine,但是并不是所有情况都能求出反解的。我们这里面只有5自由度,所以在反解时一定要给定 mask。
由于我们只有末端的位置,但反解需要末端的位姿,所以我们通过 transl函数构建末端的位姿矩阵,默认位姿矩阵与世界坐标系平行的。
然后可以通过逆运动学计算出来机器人的关节角组成的向量。
我们测试一下 让机器人反解出第一个目标位置的关节角,并绘制机器人的各个关节
发现没有问题。
第四步 运动轨迹
我们使用jtraj函数
jtraj计算两点之间一个关节(joint)的空间轨迹。
[Q,QD,QDD]=jtraj(Q0,QF,M)是一个joint空间轨迹Q(MxN)。其中joint 坐标从Q0 (1xN)变到 QF (1xN)。它使用具有0边界条件的5阶quintic多项式(http://en.wikipedia.org/wiki/Quintic_function)来表示速度和加速度。
该函数假定时间从0变到1,共经过M步。它将轨迹返回到Q中,速度和加速度返回到QD和QDD中,它们都是MxN矩阵,每个时间步长一行,每个joint一列。
[Q,QD,QDD] = jtraj(Q0, QF, M, QD0, QDF)在上述基础上指定轨迹的始终关节速度。
[Q,QD,QDD] = jtraj(Q0, QF, T) 同上但轨迹长度由时间矢量长度T (Mx1)定义。
[Q,QD,QDD] = jtraj(Q0, QF, T, QD0, QDF) 同上但指定轨迹的始终关节速度以及时间矢量。
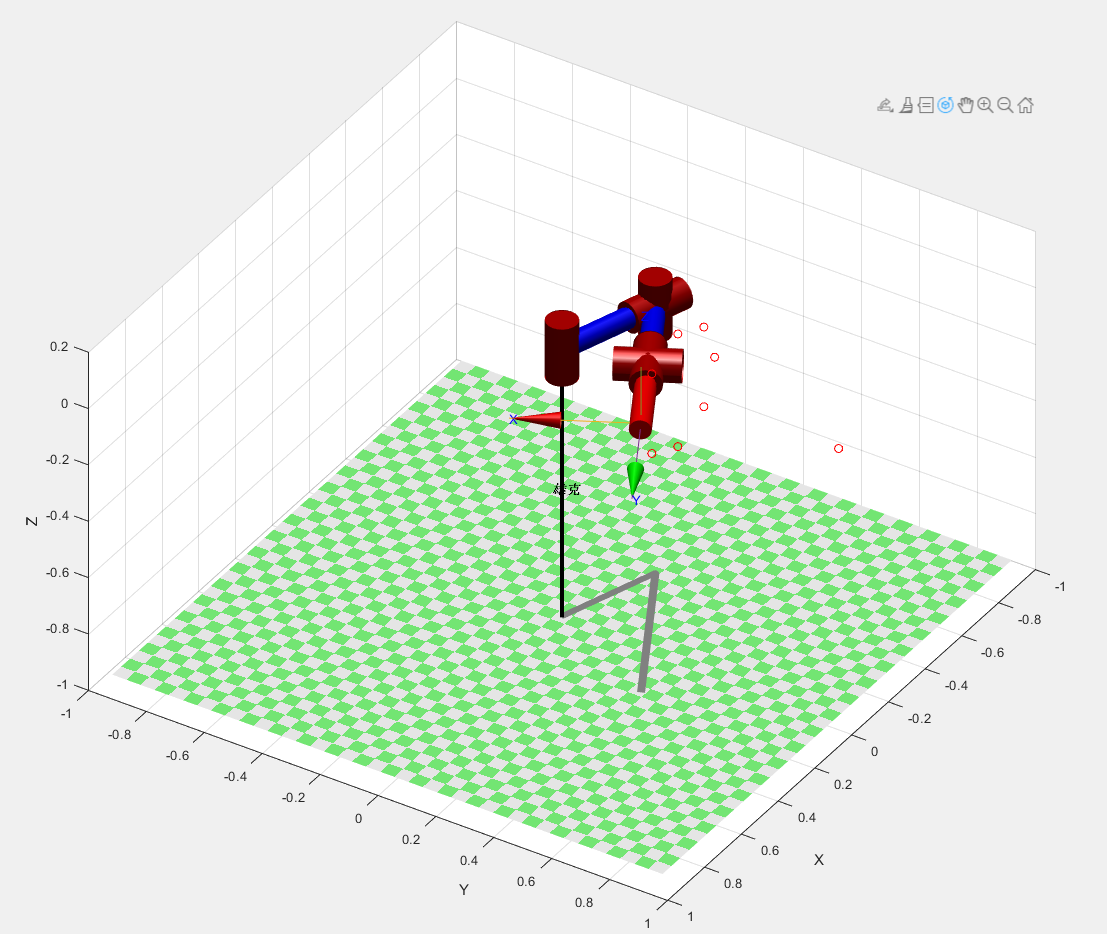
计算出轨迹之后,我们再利用 机器人的plot绘制机器人的运动动画。
最终效果就是这个样子了。
完整代码查看
matlab仿真5自由度雄克机械臂代码
最后
以上就是和谐棉花糖最近收集整理的关于matlab实现5自由度雄克机器人的运动仿真任务第一步 DH建模第二步 绘制目标点第三步 逆运动学第四步 运动轨迹的全部内容,更多相关matlab实现5自由度雄克机器人的运动仿真任务第一步内容请搜索靠谱客的其他文章。








发表评论 取消回复