系列文章
【Camera专题】Qcom-你应该掌握的Camera调试技巧1
【Camera专题】Qcom-你应该掌握的Camera调试技巧2
0.APP端增加性能分析log
增加性能日志:Tag:[KPI_CAMERA]
日志打印:
- 打开摄像头:CAMERA_OPEN
- 第一帧回调:onFirstPreviewFrame
- 切换摄像头:SWITCH_CAMERA
- 拍照:TAKE_PICTURE
- 拍照完成:TAKE_PICTURE_FINISH
- 小视频开始录制:START_RECORD
- 小视频录制完成:RECORD_COMPLETE
1.dump YUV 数据(添加第三方算法时,dump数据)
//zcf
void dumpFile(void* frame,int w,int h,int size,int base_index)
{
char buf[128];
int res=0;
snprintf(buf, sizeof(buf), "%s%d_%dx%d.yuv","/data/misc/camera/",base_index, w, h);
int file_fd = open(buf,O_RDWR | O_CREAT,0777);
if(file_fd == -1){
LOGI("zcf open file failed file_fd=%d",file_fd);
}
res = write(file_fd,frame,size);
if(res !=size)
LOGI("zcf dumpFile failed!res=%d",res);
close(file_fd);
}
//
2.修改I2C速率
kernel/arch/arm/boot/dts/qcom/msm8909.dtsi
i2c_3: i2c@78b7000 { /* BLSP1 QUP3 */
···
- qcom,clk-freq-out = <100000>;
+ qcom,clk-freq-out = <400000>;//修改成400k
qcom,clk-freq-in = <19200000>;
pinctrl-names = "i2c_active", "i2c_sleep";
···
}
3.修改I2C占空比
I2C资料:80-NU767-1,参考68-69页
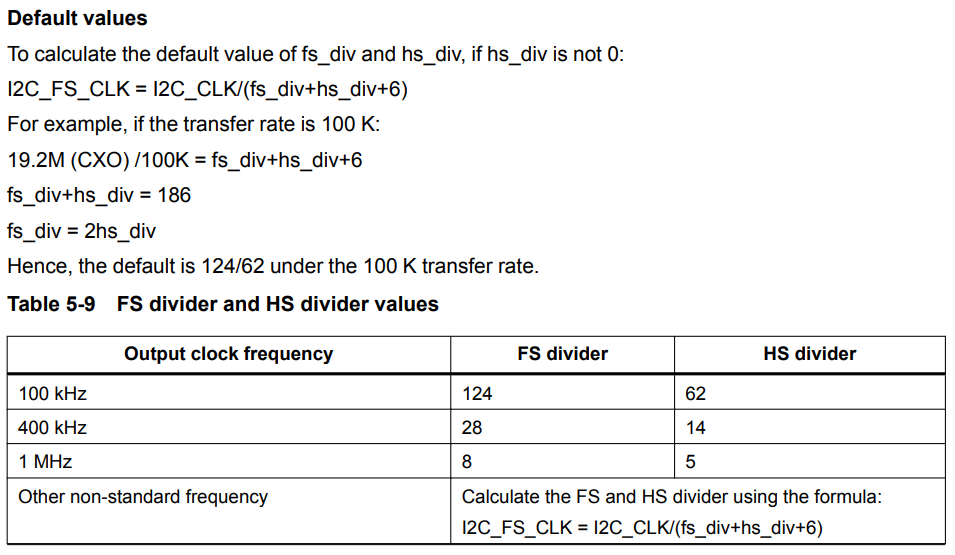
举个例子:
i2c速率(I2C_FS_CLK ):400k
I2C_CLK:24M
占空比改成:50%
I2C_FS_CLK = I2C_CLK/(fs_div+hs_div+6)
fs_div + hs_div = 24M/400k - 6 = 60-6=54
如果占空比为50%
则
fs_div=hs_div=54/2=27
kernel/arch/arm/boot/dts/qcom/msm8909.dtsi
i2c_3: i2c@78b7000 { /* BLSP1 QUP3 */
···
qcom,clk-freq-out = <400000>;//修改成400k
//snip
qcom,fs-clk-div = <27>;
qcom,high-time-clk-div = <27>;
···
}
I2C节点解释:
kernel/Documentation/devicetree/bindings/i2c/i2c-msm-v2.txt
qcom,high-time-clk-div :
high time divider value to configure clk-ctl register.
When missing, default to the value given in driver.
qcom,fs-clk-div:
fs divider value to configure clk-ctl register.
When missing, default to the value given in driver.
4.生成与合入patch
git diff > a.patch
patch -p1 < a.patch
5.新平台开启HAL的log
80 static module_debug_t cam_loginfo[(int)CAM_LAST_MODULE] = {
81 {CAM_GLBL_DBG_ERR, 1,
82 "", "persist.vendor.camera.global.debug" }, /* CAM_NO_MODULE */
83 {CAM_GLBL_DBG_ERR, 1,
84 "<MCT >", "persist.vendor.camera.mct.debug" }, /* CAM_MCT_MODULE */
85 {CAM_GLBL_DBG_ERR, 1,
86 "<SENSOR>", "persist.vendor.camera.sensor.debug" }, /* CAM_SENSOR_MODULE */
87 {CAM_GLBL_DBG_WARN, 1,
88 "<IFACE >", "persist.vendor.camera.iface.logs" }, /* CAM_IFACE_MODULE */
89 {CAM_GLBL_DBG_ERR, 1,
90 "<ISP >", "persist.vendor.camera.isp.debug" }, /* CAM_ISP_MODULE */
91 {CAM_GLBL_DBG_ERR, 1,
92 "<PPROC >", "persist.vendor.camera.pproc.debug.mask" }, /* CAM_PPROC_MODULE */
93 {CAM_GLBL_DBG_WARN, 1,
94 "<IMGLIB>", "persist.vendor.camera.imglib.logs" }, /* CAM_IMGLIB_MODULE */
95 {CAM_GLBL_DBG_WARN, 1,
96 "<CPP >", "persist.vendor.camera.cpp.debug.mask" }, /* CAM_CPP_MODULE */
97 {CAM_GLBL_DBG_ERR, 1,
98 "<HAL >", "persist.vendor.camera.hal.debug" }, /* CAM_HAL_MODULE */
99 {CAM_GLBL_DBG_ERR, 1,
100 "<JPEG >", "persist.vendor.camera.mmstill.logs" }, /* CAM_JPEG_MODULE */
101 {CAM_GLBL_DBG_WARN, 1,
102 "<C2D >", "persist.vendor.camera.c2d.debug.mask" }, /* CAM_C2D_MODULE */
103 {CAM_GLBL_DBG_ERR, 1,
104 "<STATS >", "persist.vendor.camera.stats.debug" }, /* CAM_STATS_MODULE */
105 {CAM_GLBL_DBG_ERR, 1,
106 "<STATS_AF >", "persist.vendor.camera.stats.af.debug" }, /* CAM_STATS_AF_MODULE */
107 {CAM_GLBL_DBG_ERR, 1,
108 "<STATS_AEC >", "persist.vendor.camera.stats.aec.debug" }, /* CAM_STATS_AEC_MODULE */
109 {CAM_GLBL_DBG_ERR, 1,
110 "<STATS_AWB >", "persist.vendor.camera.stats.awb.debug" }, /* CAM_STATS_AWB_MODULE */
111 {CAM_GLBL_DBG_ERR, 1,
112 "<STATS_ASD >", "persist.vendor.camera.stats.asd.debug" }, /* CAM_STATS_ASD_MODULE */
113 {CAM_GLBL_DBG_ERR, 1,
114 "<STATS_AFD >", "persist.vendor.camera.stats.afd.debug" }, /* CAM_STATS_AFD_MODULE */
115 {CAM_GLBL_DBG_ERR, 1,
116 "<STATS_Q3A >", "persist.vendor.camera.stats.q3a.debug" }, /* CAM_STATS_Q3A_MODULE */
117 {CAM_GLBL_DBG_ERR, 1,
118 "<STATS_AIS >", "persist.vendor.camera.stats.is.debug" }, /* CAM_STATS_IS_MODULE */
119 {CAM_GLBL_DBG_ERR, 1,
120 "<STATS_HAF >", "persist.vendor.camera.stats.haf.debug" }, /* CAM_STATS_HAF_MODULE */
121 {CAM_GLBL_DBG_ERR, 1,
122 "<STATS_CAFSCAN >", "persist.vendor.camera.stats.cafscan" }, /* CAM_STATS_CAFSCAN_MODULE */
123 {CAM_GLBL_DBG_ERR, 1,
124 "<SHIM >", "persist.vendor.camera.shim.debug" }, /* CAM_SHIM_LAYER */
125
126 };
2575static module_debug_t cam_loginfo[(int)CAM_LAST_MODULE] = {
2576 {CAM_GLBL_DBG_ERR, 1,
2577 "", "persist.vendor.camera.global.debug" }, /* CAM_NO_MODULE */
2578 {CAM_GLBL_DBG_ERR, 1,
2579 "<HAL>", "persist.vendor.camera.hal.debug" }, /* CAM_HAL_MODULE */
2580 {CAM_GLBL_DBG_ERR, 1,
2581 "<MCI>", "persist.vendor.camera.mci.debug" }, /* CAM_MCI_MODULE */
2582 {CAM_GLBL_DBG_ERR, 1,
2583 "<JPEG>", "persist.vendor.camera.mmstill.logs" }, /* CAM_JPEG_MODULE */
2584};
13966void QCamera3HardwareInterface::getLogLevel()
13967{
13968 char prop[PROPERTY_VALUE_MAX];
13969 uint32_t globalLogLevel = 0;
13970
13971 property_get("persist.vendor.camera.hal.debug", prop, "0");
13972 int val = atoi(prop);
13973 if (0 <= val) {
13974 gCamHal3LogLevel = (uint32_t)val;
13975 }
13976
13977 property_get("persist.vendor.camera.kpi.debug", prop, "0");
13978 gKpiDebugLevel = atoi(prop);
13979
13980 property_get("persist.vendor.camera.global.debug", prop, "0");
13981 val = atoi(prop);
13982 if (0 <= val) {
13983 globalLogLevel = (uint32_t)val;
13984 }
13985
13986 /* Highest log level among hal.logs and global.logs is selected */
13987 if (gCamHal3LogLevel < globalLogLevel)
13988 gCamHal3LogLevel = globalLogLevel;
13989
13990 return;
13991}
6.在系统中定义一个宏变量
7.查看pdaf版本库 和关键log
查看pd lib库
adb shell setprop persist.vendor.camera.pdaf_logging 1
then reset device. version will be print out like “PDLib Version: Major: %d Minor: %d Revision: %d”
lib库和校准工具对应关系
PD_lib_version Calibration_Version
3.3 J
4.2 J,L3
4.4 J,L3
4.5 J,L3,L4
4.6 J,L3,L4
4.7 J,L3,L4
5.0 L3,L4
5.1 L3,L4
5.2 L3,L4
5.3 L3,L4
关键log
007569 02-22 05:54:51.576 3809 4611 D mm-camera: <STATS_HAF >< HIGH> 3552:
af_pdaf_proc_pd_single: roi(0) lens_pos=6 index=18,
pd=16.00, defocus(um)=328, conf=1023, is_conf=TRUE, not_conf_cnt=0, is_stable=TRUE
注意,如果pdaf版本库在4.5-5.3之间,OV的sensor left map和right map 和高通是相反的
即:
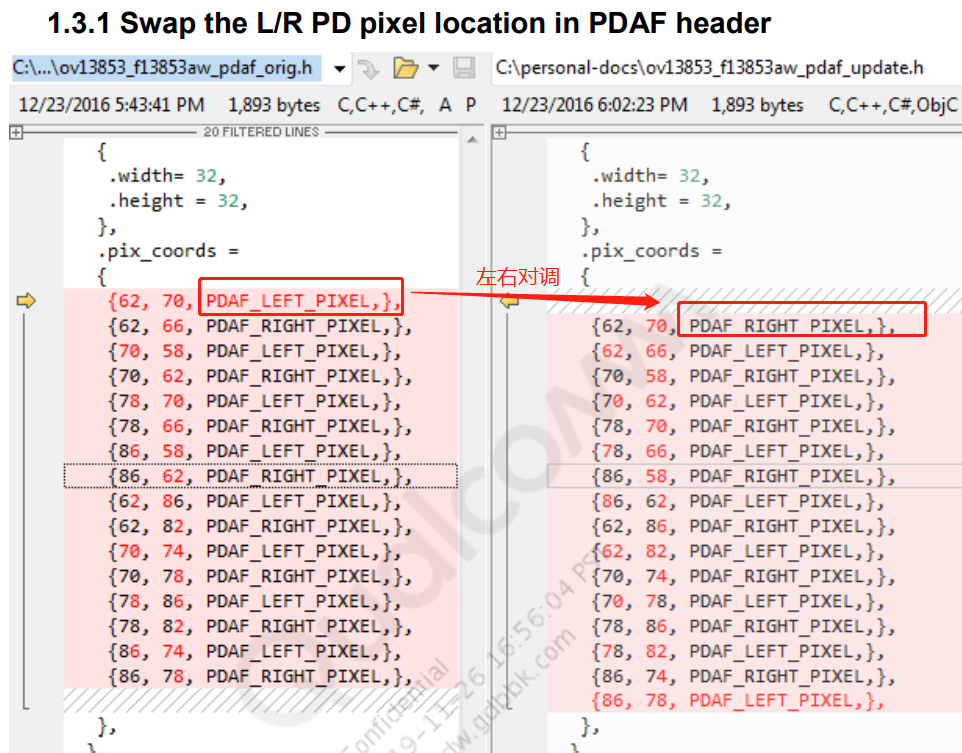
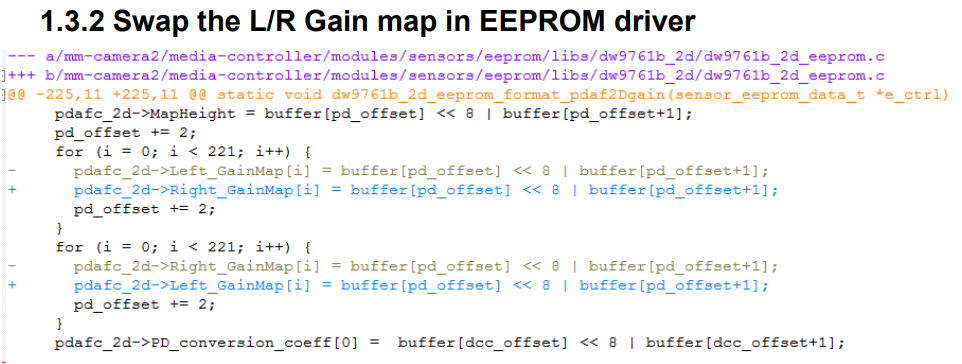
8.op_pixel_clk 的计算公式
op_pixel_clk = (传感器总数据传输速率) / 每个像素的位数
op_pixel_clk = sensor_MIPI_speed*lanes/每个像素的位数
传感器总数据传输速率 = sensor_MIPI_speed*lanes
vt_pixel_clk= HTS(0x380c/0x380d)* VTS(0x380e/0x380f)*FPS
op_pixel_clk=sensor_MIPI_speed*lanes/bits-per-pixel
9.查看当前应用包名
adb shell dumpsys window | findstr mCurrentFocus
10.driver only版本抓取kernel log
adb shell dmesg > kernel.log
11.AF
1.对焦速度 af_haf_util_end_search
12.eis生效log
adb root
adb shell setprop persist.vendor.camera.stats.is.debug 5
关键log: eis2_process
13.骁龙相机安装失败
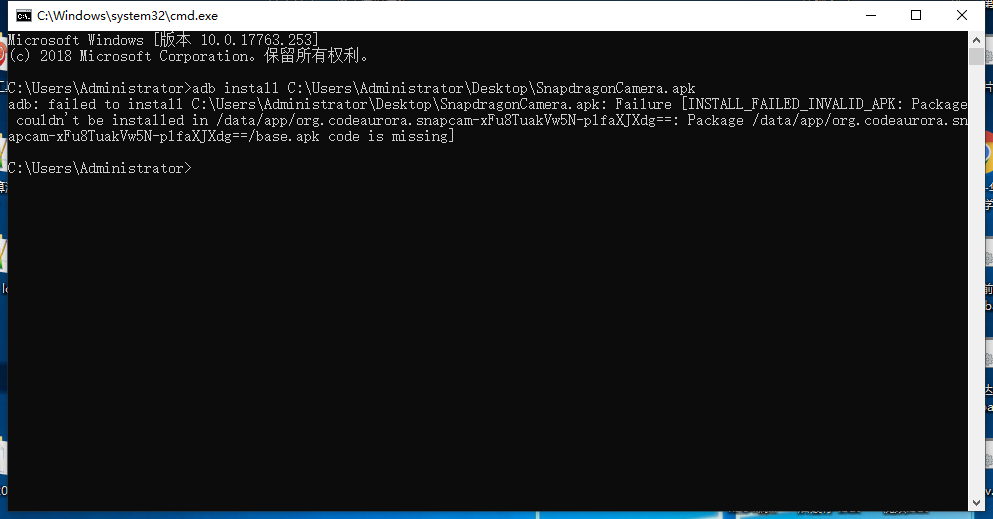
经过odex 的apk ,这样apk 是不完整的。
相机 mk 里加上 LOCAL_DEX_PREOPT := false
14.查看平台效果库
module_sensor_load_chromatix_stream_on
15.AF roi
1.最终的 AF ROI 坐标和大小,如何从 log 中获取?
key word:
af_util_adjust_roi|af_util_update_def_roi_ratios|af_util_check_if_input_is_default_roi|af_util_get_roi_default|Low-light
mm-camera: <STATS_AF >< HIGH> 2590: af_util_adjust_roi: Input ROI - x: 0 y: 0 dx: 0 dy: 0 weight 0 pd enable
mm-camera: <STATS_AF >< HIGH> 2591: af_util_adjust_roi: CAMIF size: 3264 x 2448
mm-camera: <STATS_AF >< HIGH> 2594: af_util_adjust_roi: ROI adjustment 1 ROI_TYPE: 0
mm-camera: <STATS_AF >< LOW> 2628: af_util_adjust_roi: lighting_cond_chgd: 0 spot_light_flag: 0
mm-camera: <STATS_AF >< LOW> 2650: af_util_adjust_roi: roi_updated: 1 need_to_configure_filter: 0
mm-camera: <STATS_AF >< LOW> 2659: af_util_adjust_roi: ROI needs to be updated!
mm-camera: <STATS_AF >< HIGH> 2668: af_util_adjust_roi: Input Zoom factor: 1.666667
mm-camera: <STATS_AF >< LOW> 689: af_util_update_def_roi_ratios: Default ROI ratios:
mm-camera: <STATS_AF >< LOW> 2677: af_util_adjust_roi: ROI limit check failed. Using Center ROI!
mm-camera: <STATS_AF >< LOW> 1191: af_util_check_if_input_is_default_roi: CAMIF size: 3264x2448 FOV ctr: 1632x1224 ROI ctr: 1632x1224
mm-camera: <STATS_AF >< LOW> 1196: af_util_check_if_input_is_default_roi: Distance between two ctr: 0
mm-camera: <STATS_AF >< LOW> 2787: af_util_adjust_roi: Default ROI
mm-camera: <STATS_AF >< LOW> 2793: af_util_adjust_roi: zoom_ratio = 0.600000, mw_zoom_threshold = 0.000000
mm-camera: <STATS_AF >< LOW> 2798: af_util_adjust_roi: PD MW is disabled!
mm-camera: <STATS_AF >< HIGH> 2328: af_util_get_roi_default: Input Zoom factor: 1.666667
mm-camera: <STATS_AF >< LOW> 2380: af_util_get_roi_default: Default ROI type: -1 index: 0 x: 1088 y: 816 dx: 1088 dy: 816
mm-camera: <STATS_AF >< HIGH> 2880: af_util_adjust_roi: Calculated new ROI: (1088, 816, 1088 816)
mm-camera: <STATS_AF >< LOW> 2883: af_util_adjust_roi: Request ISP to configure new ROI
0.200000f, /* H Clip Ratio Normal Light /
0.200000f,/ V Clip Ratio Normal Light /
0.500000f,/ H Clip Ratio Lowlight /
0.500000f, / V Clip Ratio Lowlight */
1、请问 Calculated new ROI 的大小是怎么计算的?
ctr_x = image_width / 2;
ctr_y = image_height / 2;
dx = image_width * h_ratio * zoom_factor;
dy = image_height * v_ratio * zoom_factor;
x = ctr_x < (roi_out->dx / 2) ? 0 : (ctr_x - (roi_out->dx / 2));
y = ctr_y < (roi_out->dy / 2) ? 0 : (ctr_y - (roi_out->dy / 2));
2、假设 CAF 默认以中心为 ROI,那么 APP 有接口可以修改 ROI 的位置吗?
As you can see from 1(formula), no parameters are passed to change this value.
16.dump OTP 数据
adb shell setprop persist.vendor.camera.cal.dump 1
数据路径:"/data/misc/camera/" 或者"/data/vendor/camera/"
17.dump h264编码前后数据
8909:
echo on
adb wait-for-device
adb root
adb remount
adb shell chmod 777 /data/misc/media
adb shell setenforce 0
adb shell setprop vidc.enc.log.in 1
adb shell setprop vidc.enc.log.out 1
pause
新:
echo on
adb wait-for-device
adb root
adb remount
adb shell chmod 777 /data/vendor/media
adb shell setenforce 0
adb shell setprop vendor.vidc.enc.log.in 1
adb shell setprop vendor.vidc.enc.log.out 1
pause
18.user root
adb root
19.确认dtsi文件
1.开机log里面搜索fdt
OF: fdt:Machine model: Qualcomm Technologies, Inc. SDM429 QRD Spyro DVT Overlay
2.搜索"Qualcomm Technologies, Inc. SDM429 QRD Spyro DVT Overlay"

3.打开kernel/msm-4.9/arch/arm64/boot/dts/qcom/sdm429-spyro-qrd-dvt-overlay.dts
4.打开sdm429-spyro-qrd-evt.dtsi
20.打印进程调用栈
adb shell debuggerd -b
21.固定帧率
persist.vendor.debug.set.fixedfps
22.抓log的骚姿势
adb logcat -c && adb logcat -G 256M && adb logcat -v threadtime -b main -b crash -b kernel 1 > log.txt
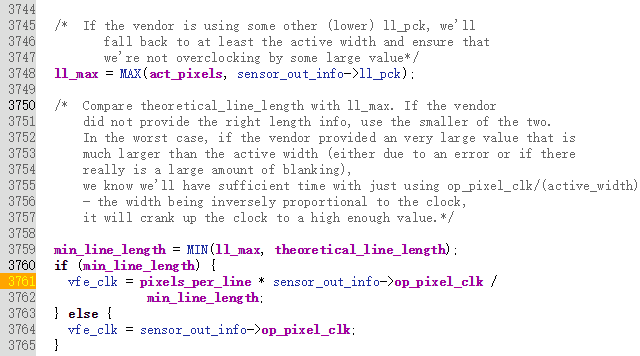
23.VFE clock的计算
24.ae收敛帧数计算
aec_settle
25.ISO计算
ISO = (analog_gain*100)/ISO_100_gain。
效果参数中 ISO_100_gain =1
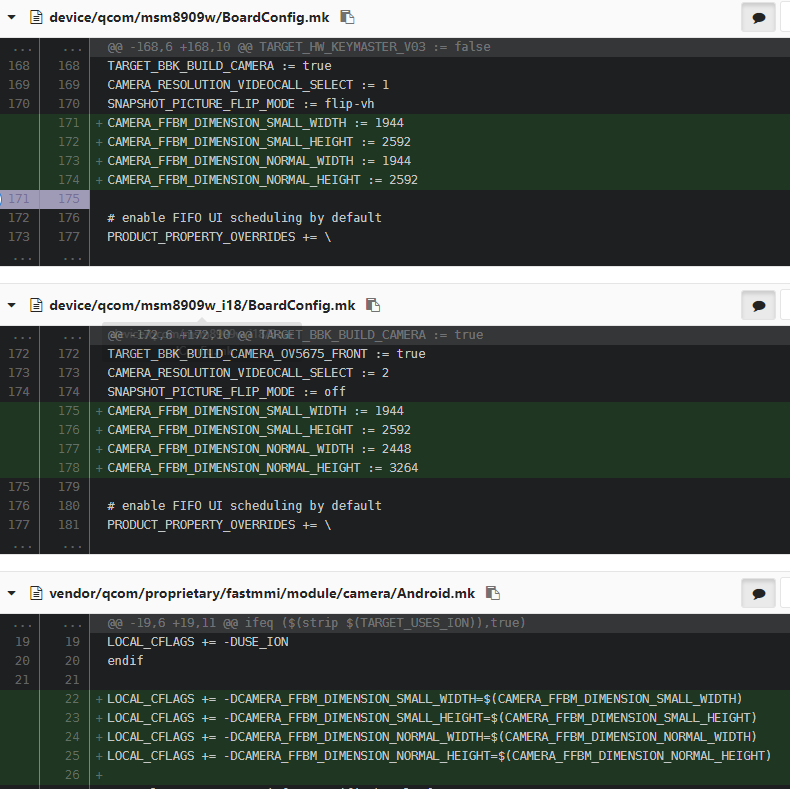
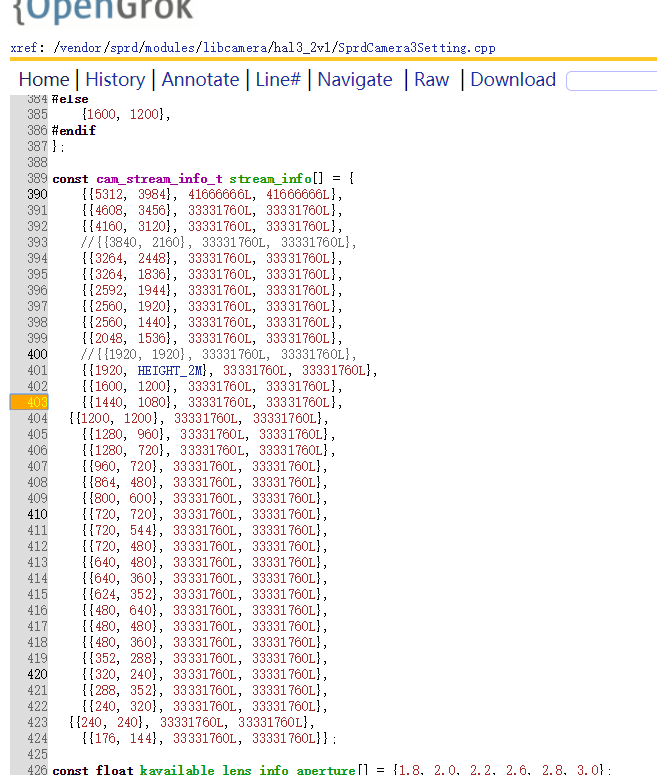
26.sprd增加一组支持的尺寸
27.adb命令查看 camera 支持的尺寸
adb shell dumpsys media.camera
28.使能HAL3
adb shell setprop persist.vendor.camera.HAL3.enabled 1
29.如何调出系统原生相机
- qcom:
vendor/qcom/proprietary/common/config/device-vendor.mk
MM_CAMERA += SnapdragonCamera
adb uninstall org.codeaurora.snapcam
//高通骁龙相机位置
vendor/qcom/proprietary/common/config/device-vendor.mk
#MM_CAMERA += SnapdragonCamera
packages/apps/SnapdragonCamera/AndroidManifest.xml
android:targetSdkVersion="21"
- sprd
diff --git a/build/target/product/generic_no_telephony.mk b/build/target/product/generic_no_telephony.mk
index adf8116..d2ad6b0 100755
--- a/build/target/product/generic_no_telephony.mk
+++ b/build/target/product/generic_no_telephony.mk
@@ -21,7 +21,6 @@ PRODUCT_POLICY := android.policy_phone
PRODUCT_PACKAGES :=
Bluetooth
- Camera2
Exchange2
FusedLocation
LatinIME
@@ -45,6 +44,7 @@ PRODUCT_PACKAGES :=
#InputDevices
#Keyguard
#Settings
+#Camera2
30.mmm编译的一些小技巧
当我们用mmm编译时,可能找不到某些依赖,又不想又mmma编译。
比如:
mmm packages/apps/Camera2
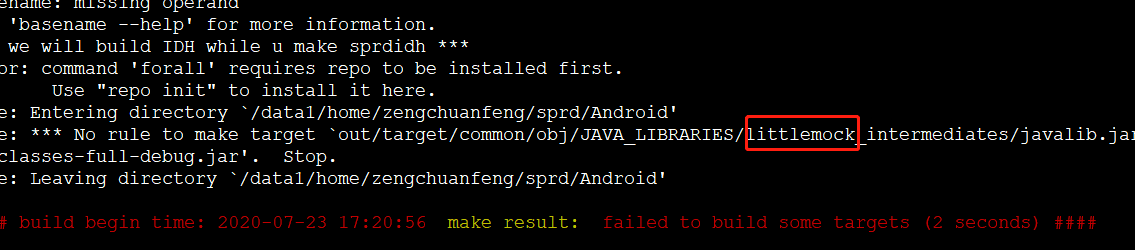
这里找不到littlemock_intermediates,我们可以去搜源码,找到littlemock
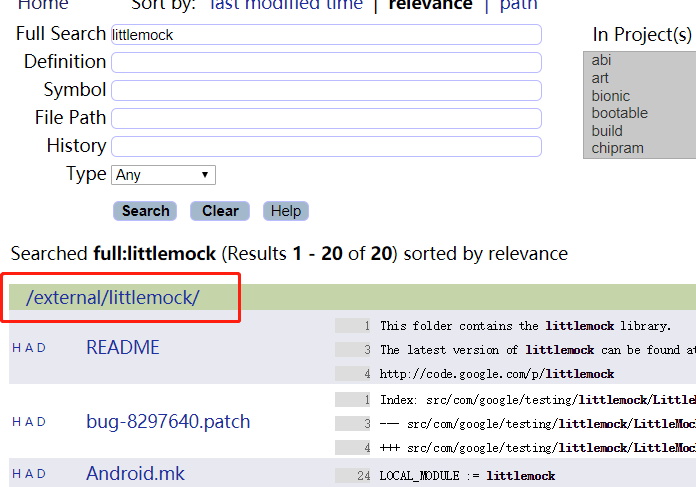
先编译
mmm external/littlemock/

再编译 mmm packages/apps/Camera2

继续当一名咸鱼(* ̄︶ ̄)!
常常因为自己很菜,流下难过的泪水。
Stay Hungry,Stay Foolish!
最后
以上就是甜美大象最近收集整理的关于【Camera专题】Qcom-你应该掌握的Camera调试技巧2的全部内容,更多相关【Camera专题】Qcom-你应该掌握内容请搜索靠谱客的其他文章。








发表评论 取消回复