S7-200SMART学习笔记
- 一、特点
- 二、硬件结构
- 三、硬件选型
- 四、硬件接线
- 五、两线制传感器接线
- 六、NPN型和PNP型传感器接线
- 七、晶体管和继电器输出特点及接线
- 八、位逻辑指令
- 8.1常开 常闭 线圈
- 8.2上升沿 下降沿
- 8.3置位、复位指令
- 8.4取反指令
- 8.5特殊继电器
- 九、PLC的工作原理
- 十、定时器指令
- 10.1类型 编号 时基说明
- 10.2定时器TON使用说明
- 10.3定时器TOF使用说明
- 10.4定时器TONR使用说明
- 十一、计数器指令
- 11.1增计数器CTU使用说明
- 11.2减计数器CTD使用说明
- 11.3增减计数器CTUD使用说明
- 十二、“启保停”程序
- 十三、电机“正停正启”“反停反启”程序
- 十四、寄存器类型和数据类型
- 十五、数据结构
- 十六、进制转换和存储范围
- 十七、比较指令
- 十八、数据传送指令
- 十九、数据转换指令
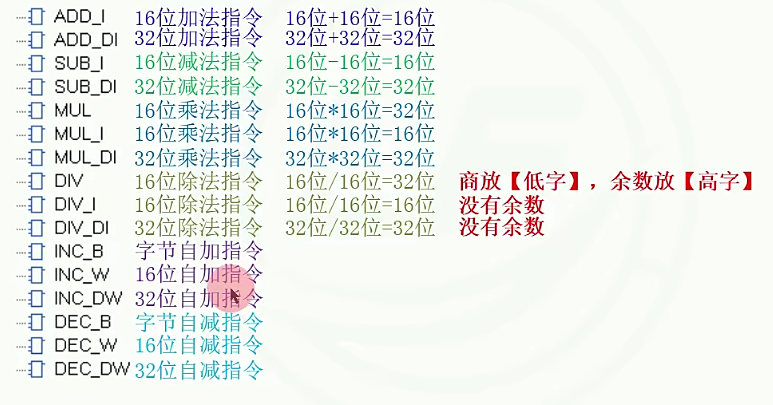
- 二十、整数运算指令
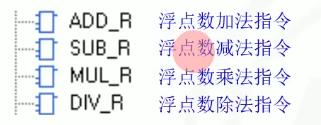
- 二十一、浮点数运算指令
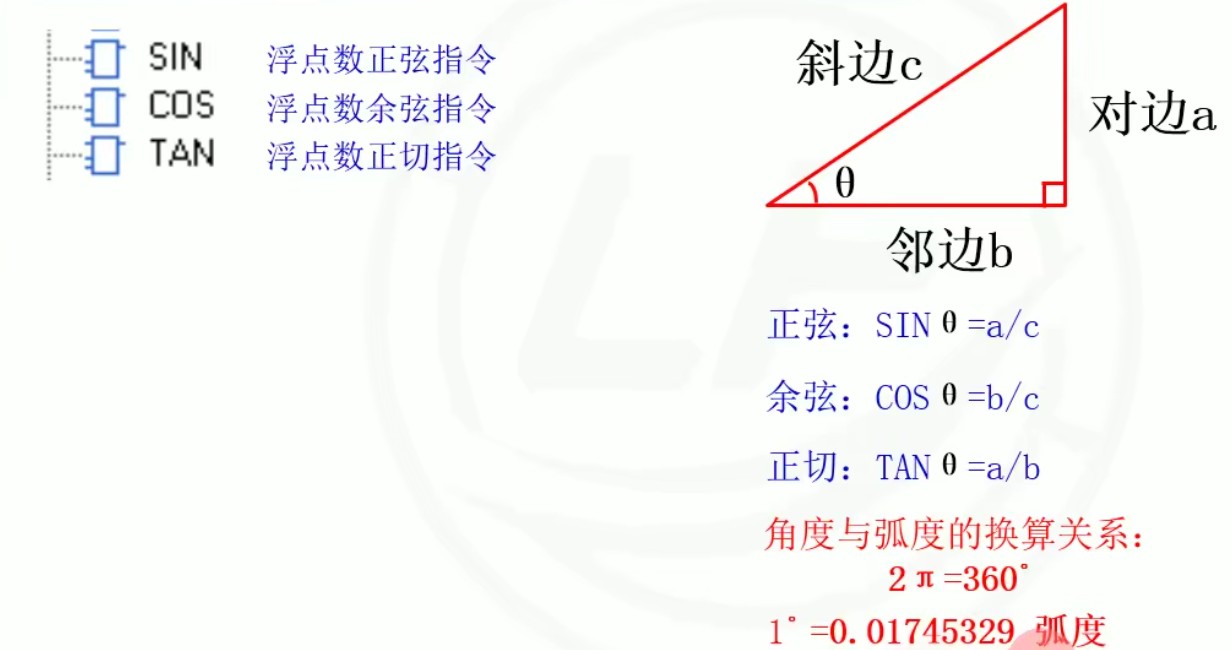
- 二十二、浮点数三角函数
- 二十三、移位寄存器指令
- 二十四、移位和循环移位指令
学习视频资源:链接:https://pan.baidu.com/s/1Lvi-696orFciEdpQp20-OA
提取码:idy3
一、特点
1、机型丰富,扩展选件多样。
2、集成以太网口和RS485串口
3、三轴脉冲输出端(CPU本体上的Q0.0,Q0.1和Q0.3可组态为高速脉冲输出)
4、S7-200 SMART编程软件升级
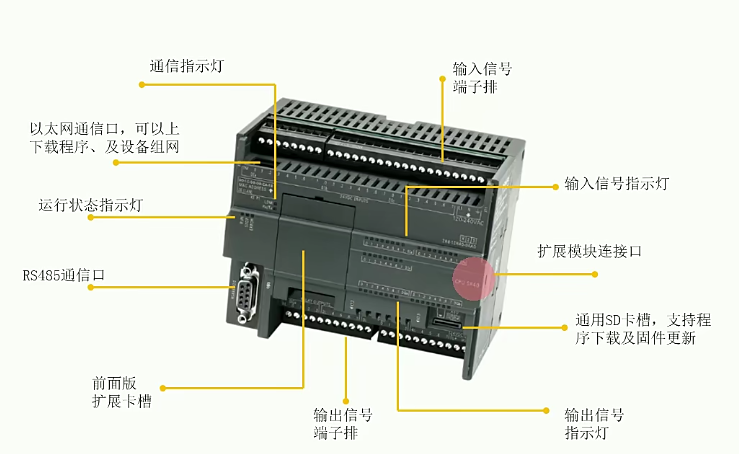
二、硬件结构
三、硬件选型
PLC选型: 晶体管输出:开关比较频繁,24V供电
晶体管输出:开关比较频繁,24V供电
继电器输出:开关不频繁,220V供电
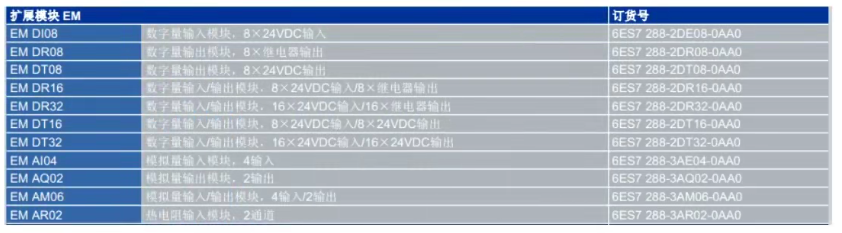
扩展模块选型:
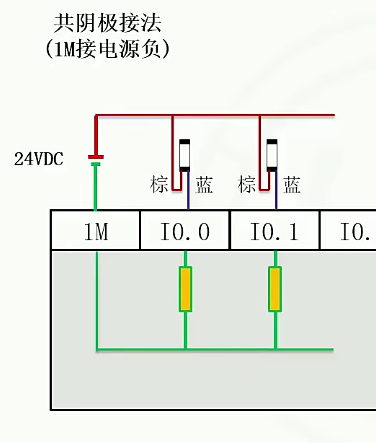
四、硬件接线
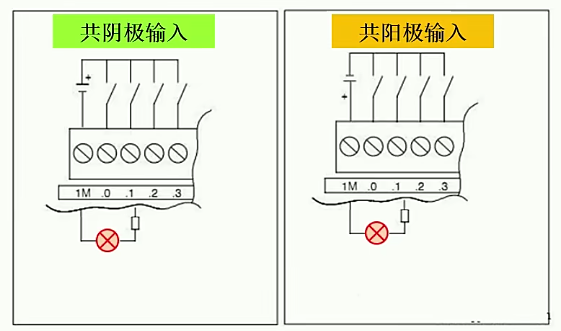
共阴级输入:1M端接电源负,则I点输入用电源的正。
共阳极输入:1M端接电源正,则I点输入用电源的负。
五、两线制传感器接线
两线制的传感器实际上和开关是一样,只是带有正负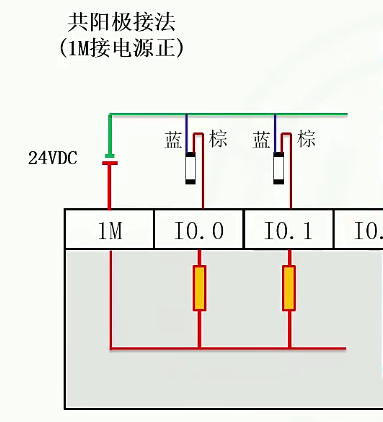
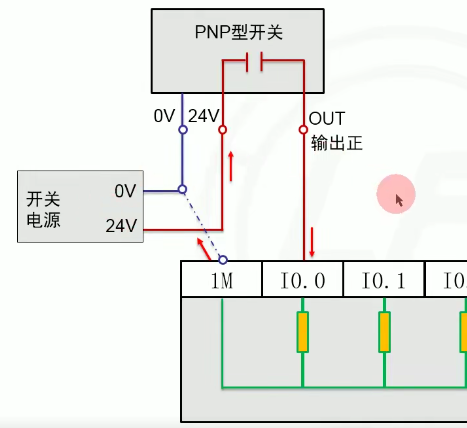
六、NPN型和PNP型传感器接线
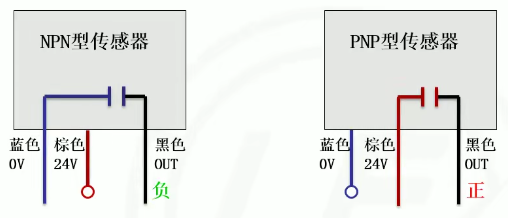
1、NPN型传感器,输出信号为负
2、PNP型传感器,输出信号为正
3、有四线制的传感器,只是将输出信号分为了常开和常闭两种信号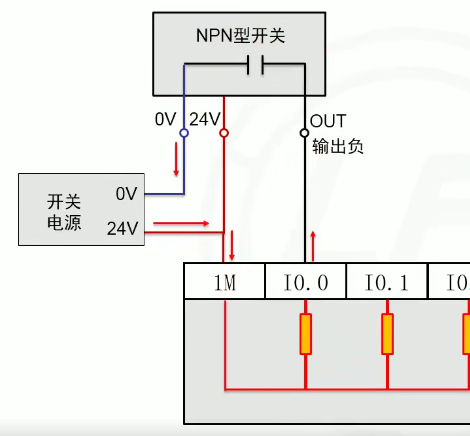
七、晶体管和继电器输出特点及接线
继电器输出特点:
①可以带交、直流负载。可以通过相对较大的电流(约为2A左右)
②输出触点响应时间相对较慢,约为10ms。在有需要高速脉冲输出控制(如需要控制步进或伺服系统)时不能选用继电器输出类型的PLC
接线:
继电器输出就是一组组的开关,我们主要是使用开关来接通电流驱动负载

晶体管输出特点:
①输出触点响应时间快,约为0.2ms以下,经常应用在需要高速输出响应的系统里
②只能通过5-30VDC电压,通过电流小(约为500MA左右)
接线:
①西门子晶体管输出为源型输出,输出电源正,可以直接驱动24V负载
②2L+/2M必须如下图所示接入电源,否则输出点不会有信号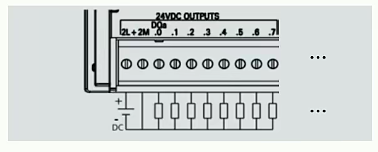
八、位逻辑指令
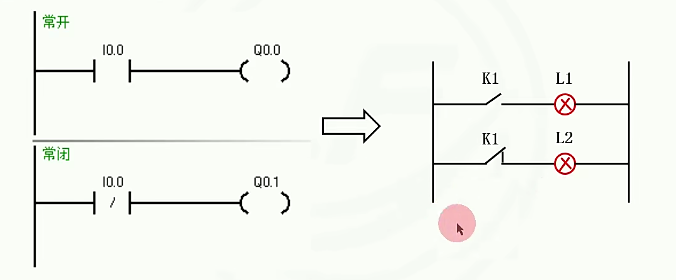
8.1常开 常闭 线圈
8.2上升沿 下降沿
上升沿:指的就是信号,从OFF转向ON的那一瞬间接通。
下降沿:指的就是信号,从ON转向OFF的那一瞬间接通。
8.3置位、复位指令
置位指令S:当执行置位指令时,将对应的寄存器置位为ON。

复位指令R:当执行复位指令时,将对应的寄存器复位为OFF。

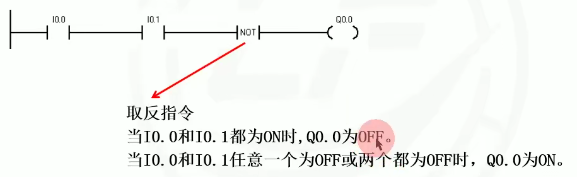
8.4取反指令
取反指令 NOT:取前面总逻辑的反信号
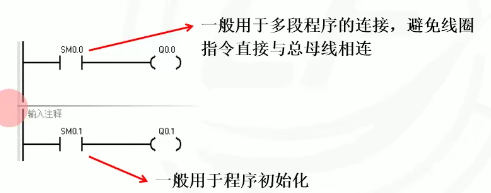
8.5特殊继电器
SM0.0:当PLC运行时,其触点会处于接通状态
SM0.1:当PLC从停止状态转至运行状态时,接通一个扫描周期
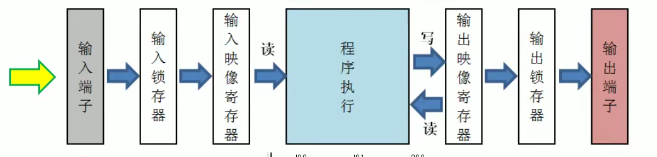
九、PLC的工作原理
PLC工作时,先扫描输入映像的状态,并以此为基础再去扫描用户程序;程序的扫描顺序:从左往右,从上往下扫描,将扫描到的输出状态放入输出映像寄存器中。(注:这时不会直接反馈到输出端子当中)
当所有程序扫描完成后,再去扫描输出映像寄存器的状态并刷新到输出锁存器中再反馈到输出端子中
输入映像寄存器:在一个扫描周期内保持不变
元件映像寄存器:包括输出,中间辅助寄存器,在一个扫描周期内可写可读,所以在一个扫描周期内,元件的结果可以被覆盖
十、定时器指令
10.1类型 编号 时基说明
S7-200 SMART PLC中,按工作方式的不同,可以将定时器分为通电延时型定时器TON,断点延时定时器TOF和有记忆接通延时定时器TONR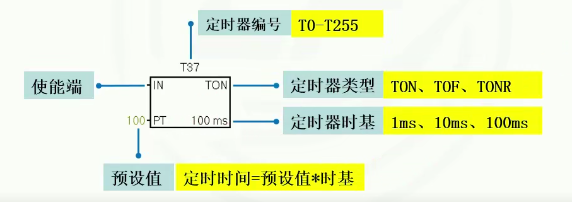

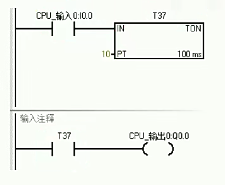
10.2定时器TON使用说明
当使能端输入有效时,定时器开始计时,当前值从0开始计时,当前值大于或等于预设值时,定时器常开触点闭合,常闭触点断开。当使能端无效时,定时器复位,当前值清零。
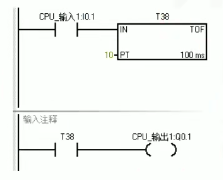
10.3定时器TOF使用说明
当使能端输入有效时,定时器常开触点关闭,定时器清零,当使能端断开时,当前值从0开始计时,当前值等于预设值时,定时器复位并停止计时,当前值保持。
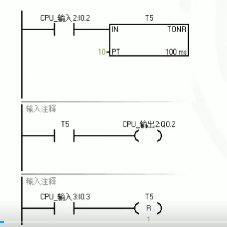
10.4定时器TONR使用说明
TON定时器基础上加了记忆功能,有记忆接通延时定时器需用复位指令进行复位,当前值清零。
十一、计数器指令
计数器是用来计数的编程元件,分为增计数器、减计数器和增减计数器。
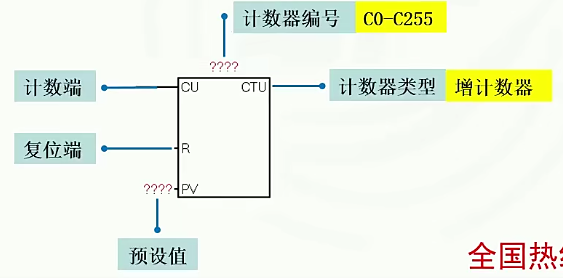
11.1增计数器CTU使用说明
①当计数端CU有上升沿脉冲输入时,计数器的当前值加1,当当前值大于或等于预设值(PV)时,计数器的状态为被置1,常开触点闭合,常闭触点断开。
②达到预设值后,计数端检测到上升沿脉冲信号,计数器当前值会继续增加。
③当复位端的状态为1时,计数器复位,当前值被清零。
④计数的范围0~32767。
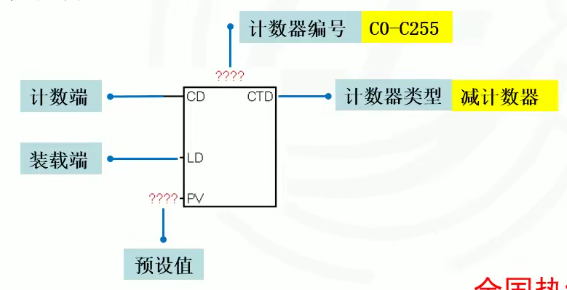
11.2减计数器CTD使用说明
①当装载端LD的状态为1时,计数器被复位,计数器的状态位为0,预设值被装载到当前值的寄存器中;当装载端LD的状态为0时,计数端CD脉冲输入有效,计数器可以计数。
②当前值减为0时,计数器常开触点闭合,常闭触点断开。计数端再输入脉冲信号,不会计数。
③计数的范围0~32767。
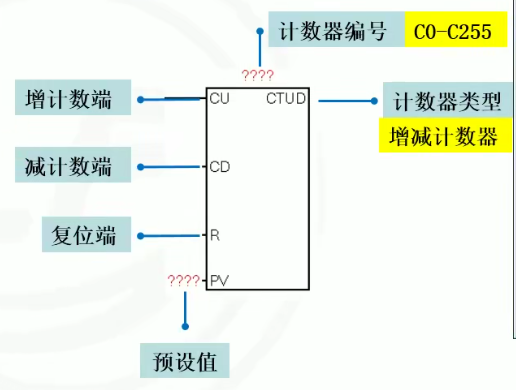
11.3增减计数器CTUD使用说明
①当增计数端CU有上升沿脉冲输入时,计数器的当前值加1。
②当减计数端CD有上升沿脉冲输入时,计数器的当前值减1。
③当复位端的状态为1时,计数器复位,当前值被清零。
④计数范围-32768~32767。
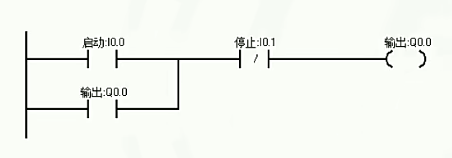
十二、“启保停”程序
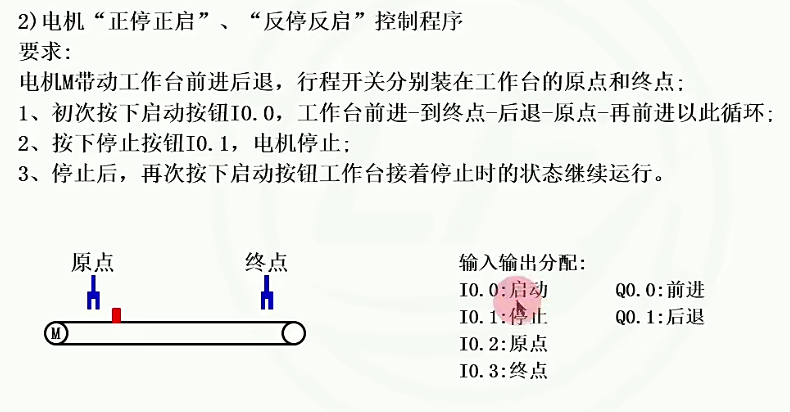
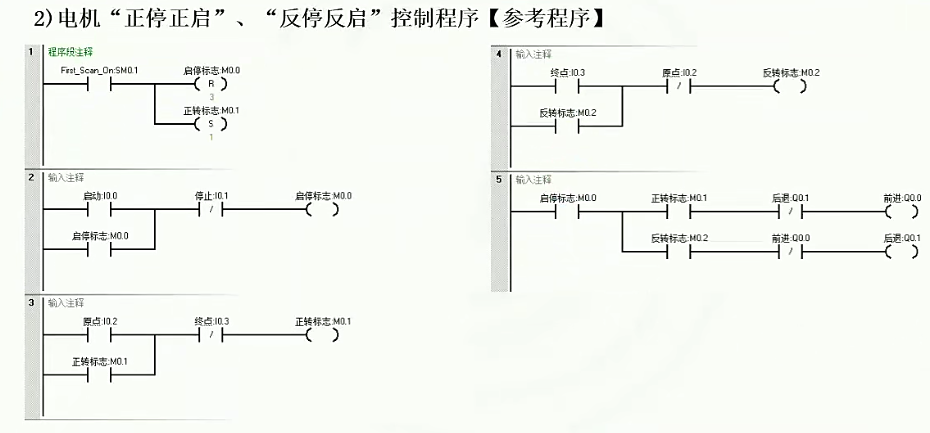
十三、电机“正停正启”“反停反启”程序
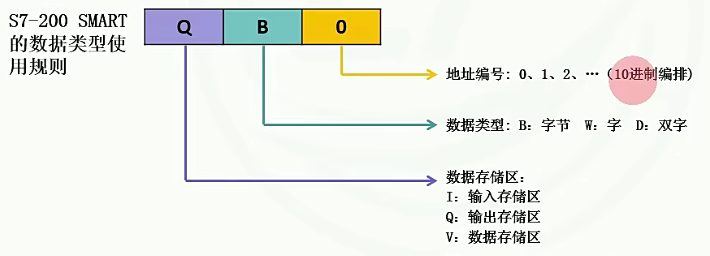
十四、寄存器类型和数据类型
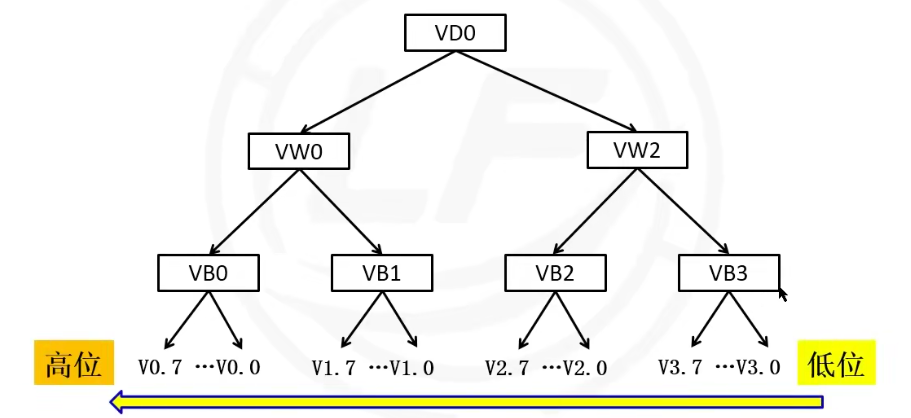
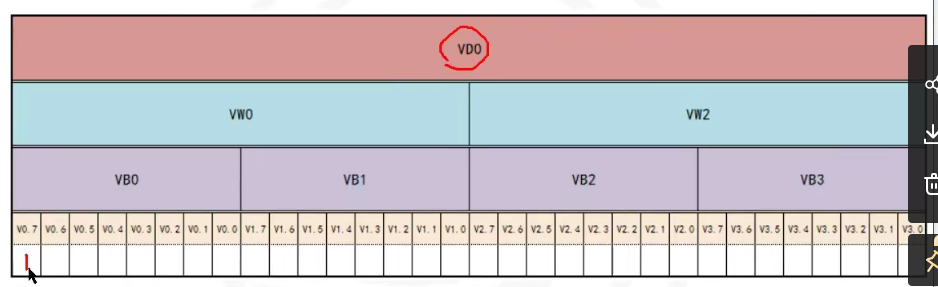
十五、数据结构
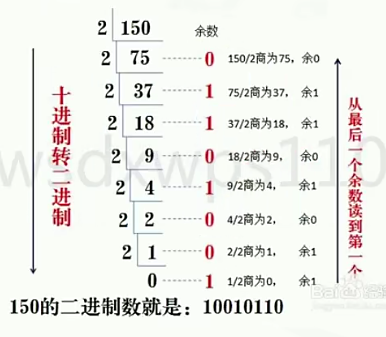
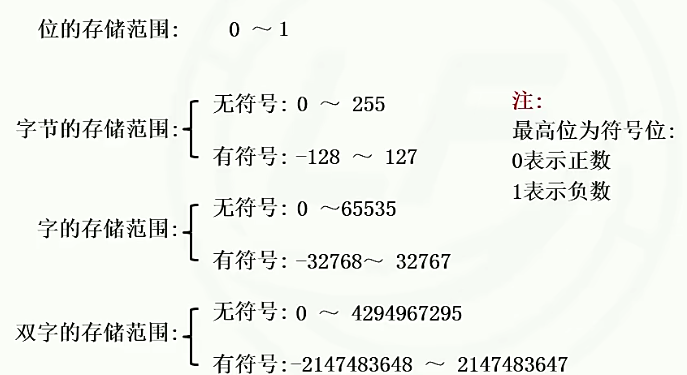
十六、进制转换和存储范围

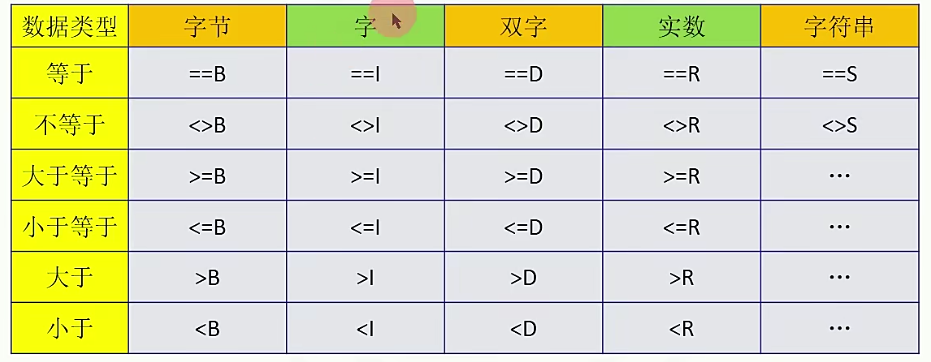
十七、比较指令
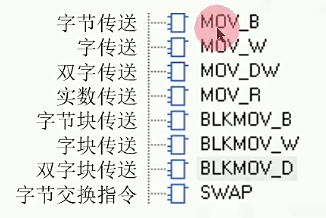
十八、数据传送指令
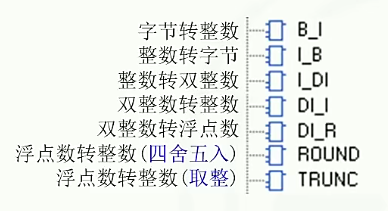
十九、数据转换指令
二十、整数运算指令
二十一、浮点数运算指令
二十二、浮点数三角函数
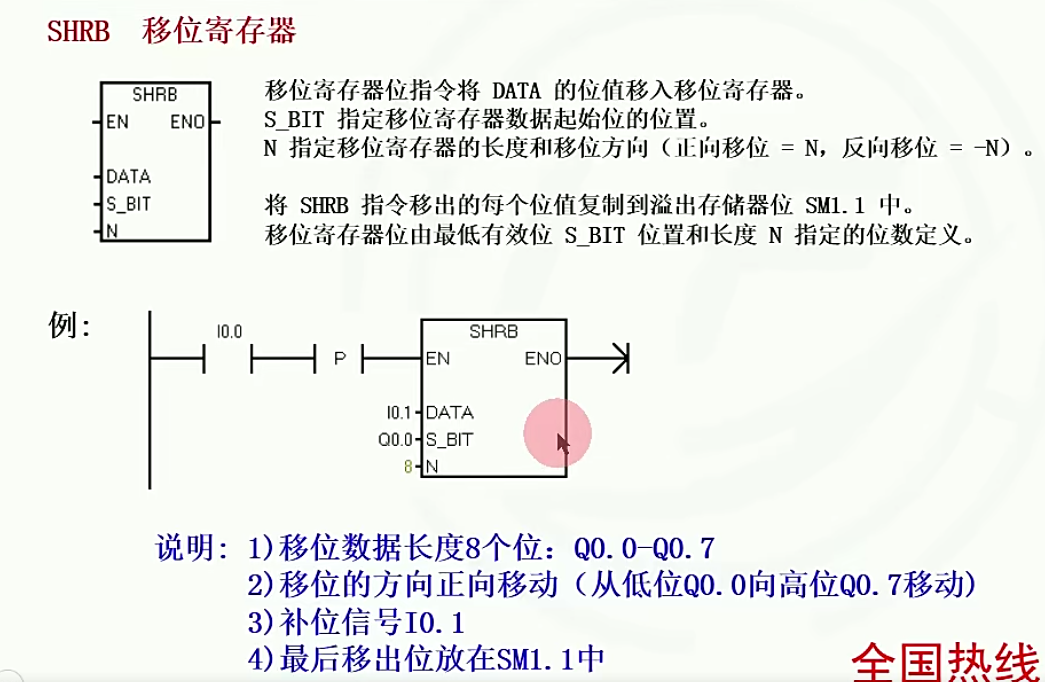
二十三、移位寄存器指令
二十四、移位和循环移位指令
最后
以上就是壮观小兔子最近收集整理的关于S7-200SMART学习笔记(含学习视频网盘资源)一、特点二、硬件结构三、硬件选型四、硬件接线五、两线制传感器接线六、NPN型和PNP型传感器接线七、晶体管和继电器输出特点及接线八、位逻辑指令九、PLC的工作原理十、定时器指令十一、计数器指令十二、“启保停”程序十三、电机“正停正启”“反停反启”程序十四、寄存器类型和数据类型十五、数据结构十六、进制转换和存储范围十七、比较指令十八、数据传送指令十九、数据转换指令二十、整数运算指令二十一、浮点数运算指令二十二、浮点数三角函数二十三、移位寄存器指令的全部内容,更多相关S7-200SMART学习笔记(含学习视频网盘资源)一、特点二、硬件结构三、硬件选型四、硬件接线五、两线制传感器接线六、NPN型和PNP型传感器接线七、晶体管和继电器输出特点及接线八、位逻辑指令九、PLC内容请搜索靠谱客的其他文章。








发表评论 取消回复