参考书籍:《自动控制原理》(第七版).胡寿松主编.
《自动控制原理PDF版下载》
3.串联校正
3.1 频率响应法校正设计
- 在线性控制系统中,常用的校正装置设计方法:分析法和综合法;
- 分析法(试探法):用分析法设计校正装置直观,在物理上容易实现,但要求设计者有一定的工程设计经验,设计过程带有试探性;
- 综合法(期望特性法):从闭环系统性能与开环系统特性密切相关出发,根据规定的性能指标要求确定系统期望的开环特性形状,然后与系统原有的开环特性比较,确定校正方式、校正装置的形式和参数;
- 分析法或综合法,其设计过程一般仅适用于最小相位系统;
- 开环频率特性的低频段表征了闭环系统的稳态性能;开环频率特性的中频段表征了闭环系统的动态性能;开环频率特性的高频段表征了闭环系统的复杂性和噪声抑制性能;
- 用频域法设计控制系统的实质:在系统中加入频率特性形状合适的校正装置,使开环系统频率特性形状变成期望的形状:低频段增益充分大,以保证稳态误差要求;中频段对数幅频特性一般为-20dB/dec,并占据充分宽的频带,以保证具备适当的相角裕度;高频段增益尽快减小,以削弱噪声影响,若系统原有部分高频段已符合要求,则校正时可保持高频段形状不变,以简化校正装置的形式;
3.2 串联超前校正
利用超前网络或PD控制器进行串联校正的基本原理:是利用超前网络或PD控制器的相角超前特性;
用频域法设计无源超前网络的步骤:
-
根据稳态误差要求,确定开环增益 K K K;
-
利用已确定的开环增益,计算待校正系统的相角裕度;
-
根据截止频率 ω c ′ ′ omega_c'' ωc′′的要求,计算超前网络参数 a 、 T a、T a、T;此步骤中,选择最大超前角频率等于要求的系统截止频率,即 ω m = ω c ′ ′ omega_m=omega_c'' ωm=ωc′′,以保证系统的响应速度,并充分利用网络的相角超前特性; ω m = ω c ′ ′ omega_m=omega_c'' ωm=ωc′′成立的条件为:
− L ′ ( ω c ′ ′ ) = L c ( ω m ) = 10 lg a (1) -L'(omega_c'')=L_c(omega_m)=10lg{a}tag{1} −L′(ωc′′)=Lc(ωm)=10lga(1)
可确定 a a a值,根据:
T = 1 ω m a (2) T=frac{1}{omega_msqrt{a}}tag{2} T=ωma1(2)
确定 T T T值; -
验算已校正系统的相角裕度 γ ′ ′ gamma'' γ′′;计算 φ m varphi_m φm值,由已知的 ω c ′ ′ omega_c'' ωc′′算出待校正系统在 ω c ′ ′ omega_c'' ωc′′时的相角裕度 γ ( ω c ′ ′ ) gamma(omega_c'') γ(ωc′′),由 γ ′ ′ = φ m + γ ( ω c ′ ′ ) gamma''=varphi_m+gamma(omega_c'') γ′′=φm+γ(ωc′′)算出 γ ′ ′ gamma'' γ′′,当 γ ′ ′ gamma'' γ′′不满足要求时,重新选 ω m omega_m ωm;
实例分析:
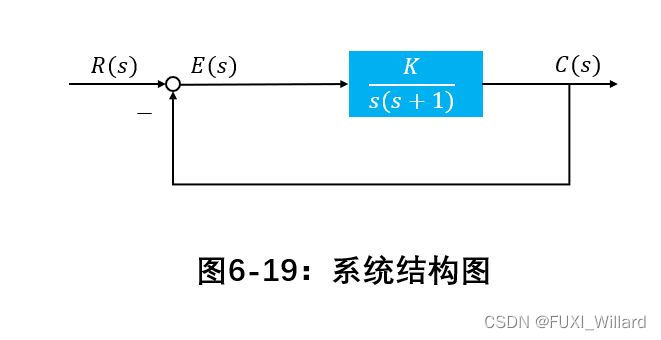
Example1: 设控制系统如下图所示,若要求系统在单位斜坡输入信号作用时,位置输出稳态误差
e
s
s
(
∞
)
≤
0.1
r
a
d
e_{ss}(infty)≤0.1rad
ess(∞)≤0.1rad,开环系统截止频率
ω
c
′
′
≥
4.4
r
a
d
/
s
omega_c''≥4.4rad/s
ωc′′≥4.4rad/s,相角裕度
γ
′
′
≥
45
°
gamma''≥45°
γ′′≥45°,幅值裕度
h
′
′
≥
10
d
B
h''≥10dB
h′′≥10dB,试设计串联无源超前网络。
解:
因为
e
s
s
(
∞
)
=
1
K
≤
0.1
e_{ss}(infty)=frac{1}{K}≤0.1
ess(∞)=K1≤0.1
取
K
=
10
r
a
d
−
1
K=10rad^{-1}
K=10rad−1,则待校正系统传递函数为:
G
0
(
s
)
=
10
s
(
s
+
1
)
G_0(s)=frac{10}{s(s+1)}
G0(s)=s(s+1)10
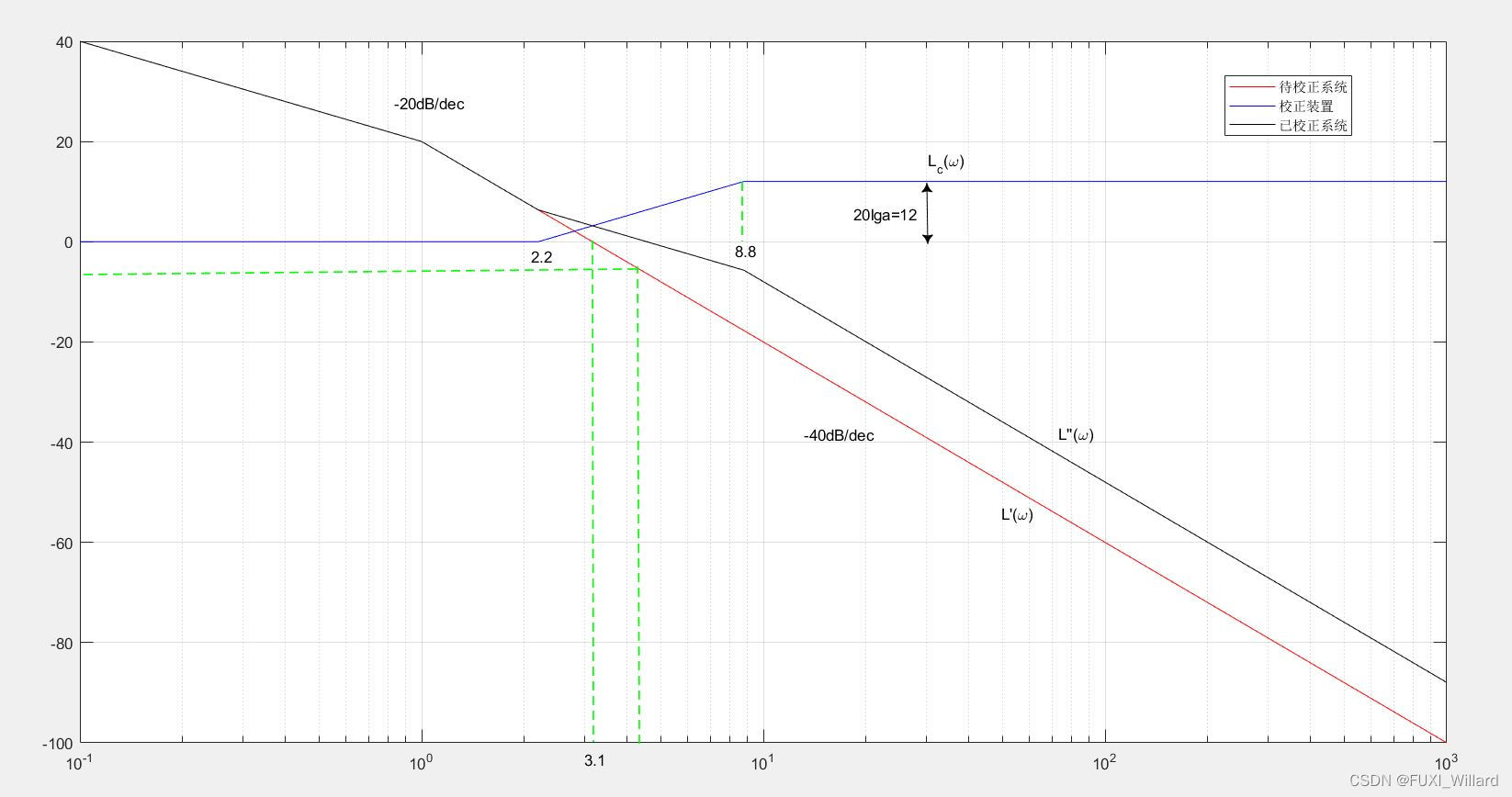
可得其对数幅频渐近特性曲线,或由
ω
c
′
omega_c'
ωc′计算公式可算得待校正系统的
ω
c
′
=
3.1
r
a
d
/
s
omega_c'=3.1rad/s
ωc′=3.1rad/s,算出待校正系统的相角裕度:
γ
=
180
°
−
90
°
−
arctan
ω
c
′
′
=
17.9
°
gamma=180°-90°-arctanomega_c''=17.9°
γ=180°−90°−arctanωc′′=17.9°
二阶系统幅值裕度为
+
∞
+infty
+∞dB,相角裕度小的原因,因为待校正系统的对数幅频渐近特性中频区的斜率为-40dB/dec,由于截止频率和相角裕度均低于指标要求,因此采用串联超前校正是合适的;
计算超前网络参数,试选
ω
m
=
ω
c
′
′
=
4.4
r
a
d
/
s
omega_m=omega_c''=4.4rad/s
ωm=ωc′′=4.4rad/s,由渐近特性图或计算公式可得
L
(
ω
c
′
′
)
=
−
6
d
B
L(omega_c'')=-6dB
L(ωc′′)=−6dB,可得:
a
=
4
,
T
=
0.114
s
a=4,T=0.114s
a=4,T=0.114s,超前网络传递函数为:
4
G
c
(
s
)
=
1
+
0.456
s
1
+
0.114
s
4G_c(s)=frac{1+0.456s}{1+0.114s}
4Gc(s)=1+0.114s1+0.456s
为了补偿无源超前网络产生的增益衰减,放大器的增益需要提高4倍,否则不能保证稳态误差要求;
超前网络参数确定后,已校正系统的开环传递函数为:
a
G
c
(
s
)
G
0
(
s
)
=
10
(
1
+
0.456
s
)
s
(
1
+
0.114
s
)
(
1
+
s
)
aG_c(s)G_0(s)=frac{10(1+0.456s)}{s(1+0.114s)(1+s)}
aGc(s)G0(s)=s(1+0.114s)(1+s)10(1+0.456s)
可得渐近幅频特性曲线,已校正系统
ω
c
′
′
=
4.4
r
a
d
/
s
omega_c''=4.4rad/s
ωc′′=4.4rad/s,可得待校正系统的
γ
(
ω
c
′
′
)
=
12.8
°
gamma(omega_c'')=12.8°
γ(ωc′′)=12.8°,由计算公式可得
φ
m
=
36.9
°
varphi_m=36.9°
φm=36.9°,因此已校正系统的相角裕度为:
γ
′
′
=
φ
m
+
γ
(
ω
c
′
′
)
=
49.7
°
>
45
°
gamma''=varphi_m+gamma(omega_c'')=49.7°>45°
γ′′=φm+γ(ωc′′)=49.7°>45°
已校正系统的幅值裕度仍为
+
∞
+infty
+∞dB,因此,全部性能指标均满足要求;
在有些情况下采用串联超前校正是无效的:
- 闭环带宽要求。若待校正系统不稳定,为了得到规定的相角裕度,需要超前网络提供很大的相角超前量,这样,超前网络的 a a a值必须选得很大,从而造成已校正系统带宽过大,使得通过系统的高频噪声电平很高,很可能使系统失控;
- 在截止频率附近相角迅速减小的待校正系统,一般不宜采用串联超前校正,因为随着截止频率的增大,待校正系统相角迅速减小,使已校正系统的相角裕度改善不大,很难得到足够的相角超前量;在一般情况下,产生这种相角迅速减小的原因是,在待校正系统截止频率附近,或有两个交接频率彼此靠近的惯性环节,或有两个交接频率彼此相等的惯性环节,或有一个振荡环节;
3.3 串联滞后校正
利用滞后网络或PI控制器进行串联校正的基本原理:利用滞后网络或PI控制器的高频幅值衰减特性,使已校正系统截止频率下降,从而使系统获得足够的相角裕度;
滞后网络的最大滞后角应力求避免发生在系统截止频率附近,在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下,可考虑采用串联滞后校正;
如果待校正系统已具备满意的动态性能,仅稳态性能不能满足指标要求,也可以采用串联滞后校正以提高系统的稳态精度,同时保持其动态性能仍然满足性能指标要求;
如果所研究的系统为单位反馈最小相位系统,应用频域法设计串联无源滞后网络的步骤:
-
根据稳态误差要求,确定开环增益 K K K;
-
利用已确定的开环增益,画出待校正系统的开环对数频率特性,确定待校正系统的截止频率 ω c ′ omega_c' ωc′、相角裕度 γ gamma γ和幅值裕度 h ( d B ) h(dB) h(dB);
-
选择不同的 ω c ′ ′ omega_c'' ωc′′,计算或查出不同的 γ gamma γ值,在开环伯德图上绘制 γ ( ω c ′ ′ ) gamma(omega_c'') γ(ωc′′)曲线;
-
根据相角裕度 γ ′ ′ gamma'' γ′′要求,选择已校正系统的截止频率 ω c ′ ′ omega_c'' ωc′′,考虑到滞后网络在新的截止频率 ω c ′ ′ omega_c'' ωc′′处会产生一定的相角滞后 φ c ( ω c ′ ′ ) varphi_c(omega_c'') φc(ωc′′),因此有式子成立: γ ′ ′ = γ ( ω c ′ ′ ) + φ c ( ω c ′ ′ ) gamma''=gamma(omega_c'')+varphi_c(omega_c'') γ′′=γ(ωc′′)+φc(ωc′′);其中: γ ′ ′ gamma'' γ′′是指标要求值, φ c ( ω c ′ ′ ) varphi_c(omega_c'') φc(ωc′′)在确定 ω c ′ ′ omega_c'' ωc′′前取-6°;
-
根据关系式确定滞后网络参数 b 、 T b、T b、T;
20 lg b + L ′ ( ω c ′ ′ ) = 0 , 1 b T = 0.1 ω c ′ ′ (3) 20lg{b}+L'(omega_c'')=0,frac{1}{bT}=0.1omega_c''tag{3} 20lgb+L′(ωc′′)=0,bT1=0.1ωc′′(3) -
验算已校正系统的相角裕度和幅值裕度;
3.4 串联超前网络和串联滞后网络比较
- 超前校正是利用超前网络的相角超前特性,滞后校正是利用滞后网络的高频幅值衰减特性;
- 为了满足严格的稳态性能要求,当采用无源校正网络时,超前校正要求一定的附加增益,而滞后校正一般不需要附加增益;
- 对于同一系统,采用超前校正的系统带宽大于采用滞后校正的系统带宽;从提高系统响应速度的观点看,希望系统带宽越大越好,与此同时,带宽越大则系统越容易受噪声干扰的影响,因此如果系统输入端噪声电平较高,一般不宜选用超前校正;
3.5 串联滞后-超前校正
采用串联滞后-超前校正,已校正系统响应速度较快,超调量较小,抑制高频噪声的性能较好;当待校正系统不稳定,且要求校正后系统的响应速度、相角裕度和稳态精度较高时,以采用串联滞后-超前校正为宜;
基本原理:利用滞后-超前网络的超前部分来增大系统的相角裕度,同时利用滞后部分来改善系统的稳态性能;
串联滞后-超前校正设计步骤:
-
根据稳态性能要求确定开环增益 K K K;
-
绘制待校正系统的开环对数幅频渐近特性,求出待校正系统的截止频率 ω c ′ omega_c' ωc′、相角裕度 γ gamma γ和幅值裕度 h ( d B ) h(dB) h(dB);
-
在待校正系统开环对数幅频渐近特性上,选择斜率从 − 20 -20 −20dB/dec变为-40dB/dec的交接频率作为校正网络超前部分的交接频率 ω b omega_b ωb;
-
根据响应速度要求,选择系统的截止频率 ω c ′ ′ omega_c'' ωc′′和校正网络衰减因子 1 / α 1/alpha 1/α;要保证已校正系统的截止频率为所选的 ω c ′ ′ omega_c'' ωc′′,有:
− 20 lg α + L ′ ( ω c ′ ′ ) + 20 lg T b ω c ′ ′ = 0 (4) -20lgalpha+L'(omega_c'')+20lg{T_b}omega_c''=0tag{4} −20lgα+L′(ωc′′)+20lgTbωc′′=0(4)
其中: T b = 1 / ω b ; L ′ ( ω c ′ ′ ) + 20 lg T b ω c ′ ′ T_b=1/omega_b;L'(omega_c'')+20lg{T_b}omega_c'' Tb=1/ωb;L′(ωc′′)+20lgTbωc′′可由待校正系统开环对数幅频渐近特性的-20dB/dec延长线在 ω c ′ ′ omega_c'' ωc′′处的数值确定; -
根据相角裕度要求,估算校正网络滞后部分的交接频率 ω a omega_a ωa;
-
校验已校正系统的各项性能指标;
最后
以上就是清脆绿草最近收集整理的关于自动控制原理6.3---串联校正的全部内容,更多相关自动控制原理6内容请搜索靠谱客的其他文章。








发表评论 取消回复