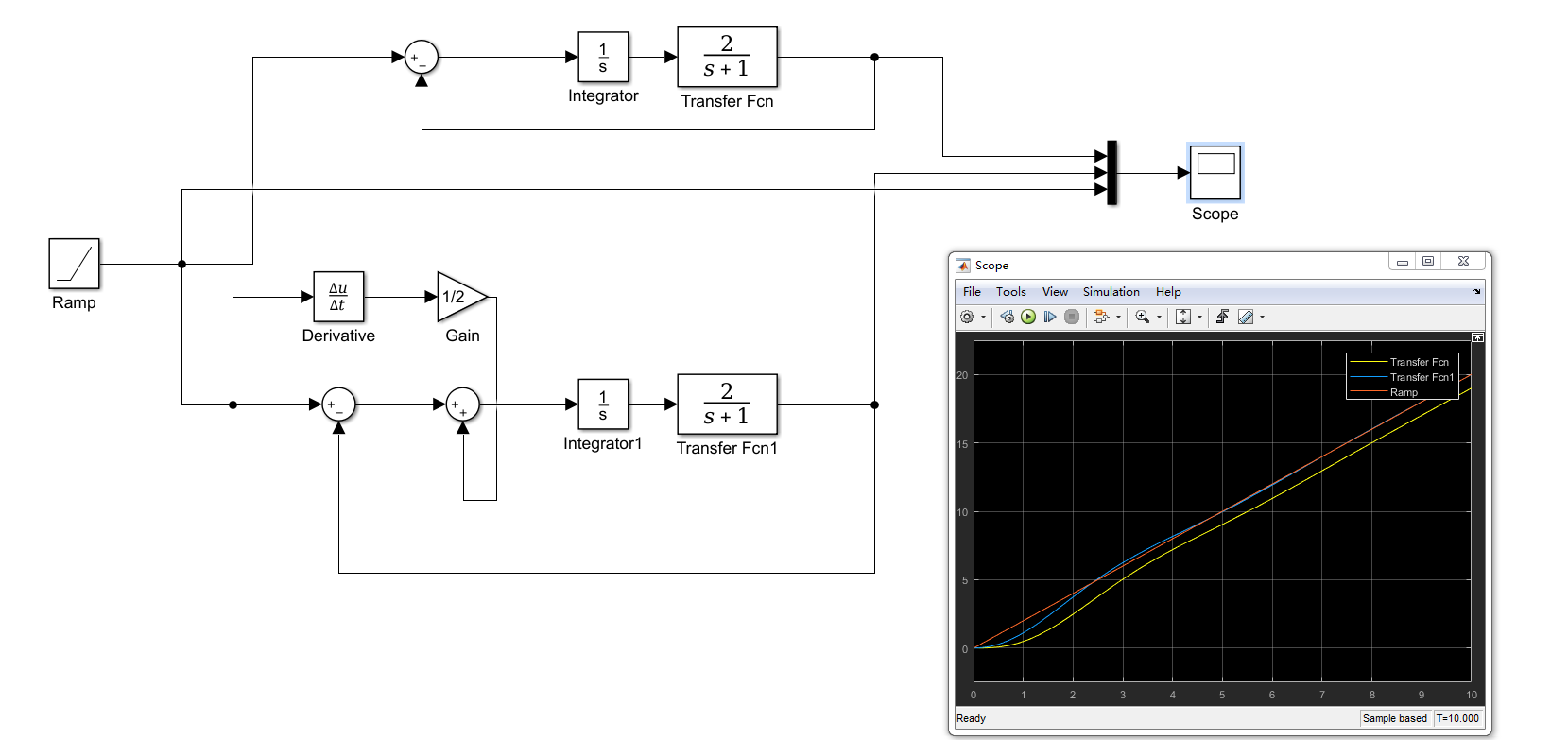
1:前馈校正
前馈校正可以减小系统的静态误差,提高系统输出精度。与此作用相同的还有,提高系统型别,提高开环增益。
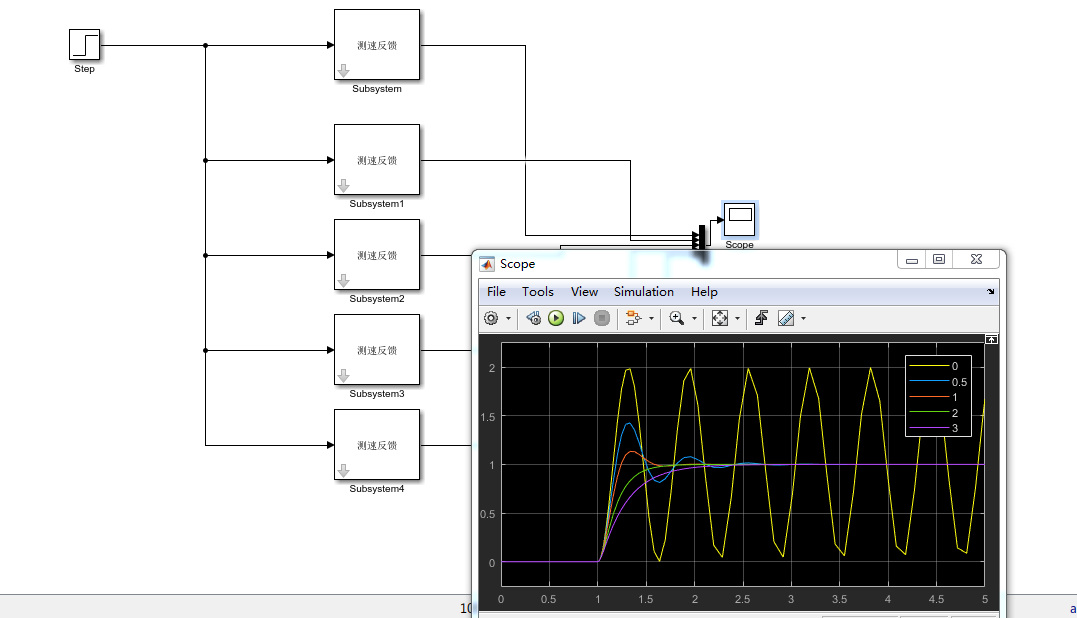
2:测速反馈
测速反馈可以提高系统的阻尼,使得超调下降。但是测速反馈会使开环增益下降,使稳态误差增加。
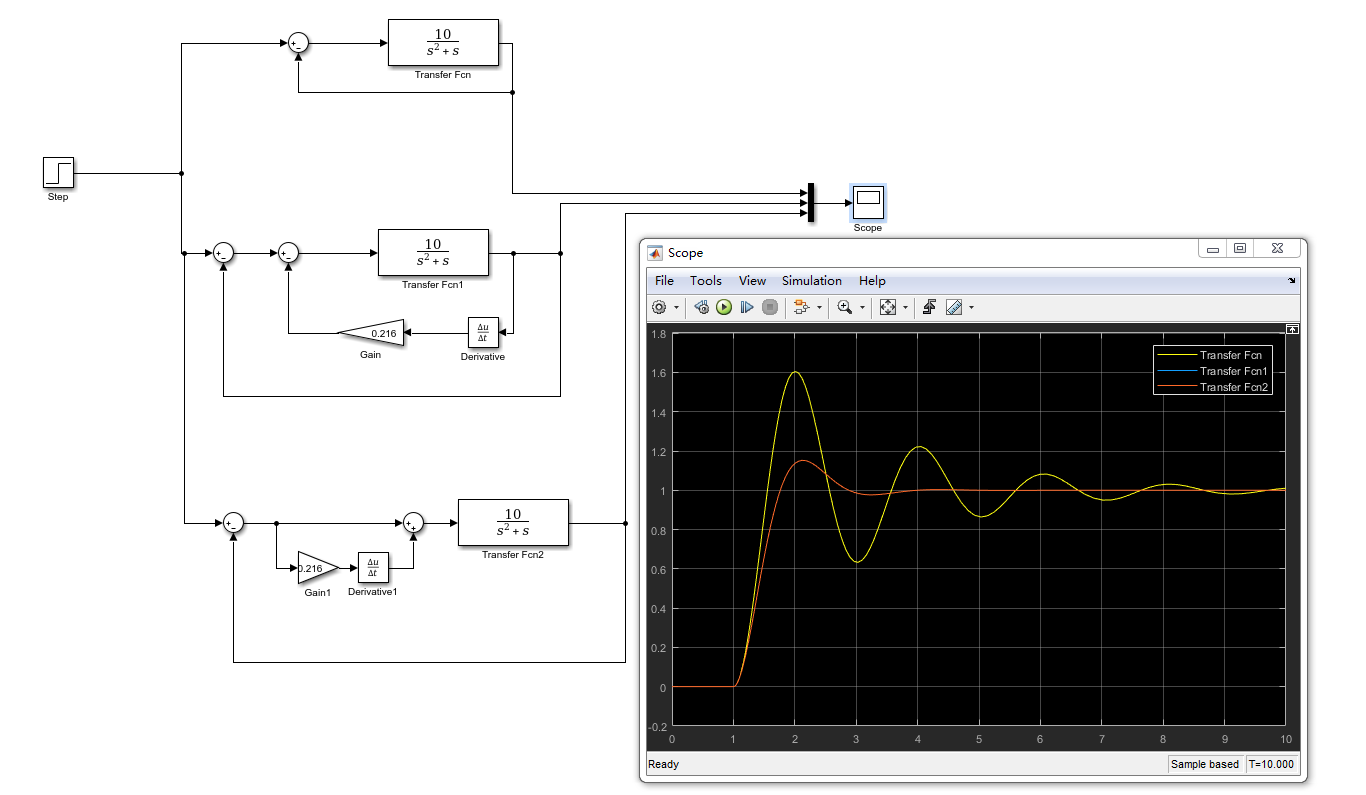
3:PD控制
PD控制可以提高系统的阻尼,使系统的超调降低。
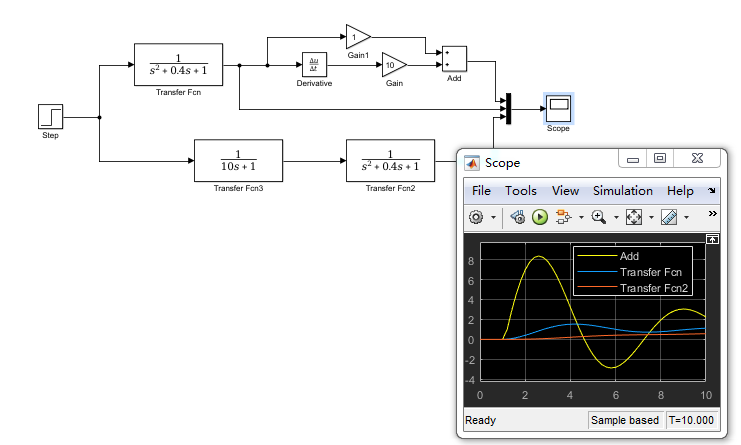
4:附加闭环零极点的影响
附加闭环零点后,峰值时间提前,超调量增大
附加闭环极点后,与之相反。峰值时间滞后,超调量减小
最后
以上就是务实外套最近收集整理的关于自动控制原理——时域分析法——几个simulink校正方法(测速反馈,前馈校正,PD控制)的全部内容,更多相关自动控制原理——时域分析法——几个simulink校正方法(测速反馈内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复