位置式PID算法
{
e
r
r
o
r
(
k
)
=
r
i
n
(
k
)
−
y
o
u
t
(
k
)
x
(
1
)
=
e
r
r
o
r
(
k
)
x
(
2
)
=
x
(
2
)
+
T
s
∗
e
r
r
o
r
(
k
)
x
(
3
)
=
e
r
r
o
r
(
k
)
−
e
r
r
o
r
(
k
−
1
)
p
i
d
=
[
K
p
K
i
K
d
]
u
(
k
)
=
p
i
d
∗
x
begin{cases}error(k)=rin(k)-yout(k) \x(1)=error(k) \x(2)=x(2)+Ts*error(k)\x(3)=error(k)-error(k-1)\pid = [K_p :K_i:K_d]\u(k)=pid*xend{cases}
⎩⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎧error(k)=rin(k)−yout(k)x(1)=error(k)x(2)=x(2)+Ts∗error(k)x(3)=error(k)−error(k−1)pid=[KpKiKd]u(k)=pid∗x
u
(
k
)
u(k)
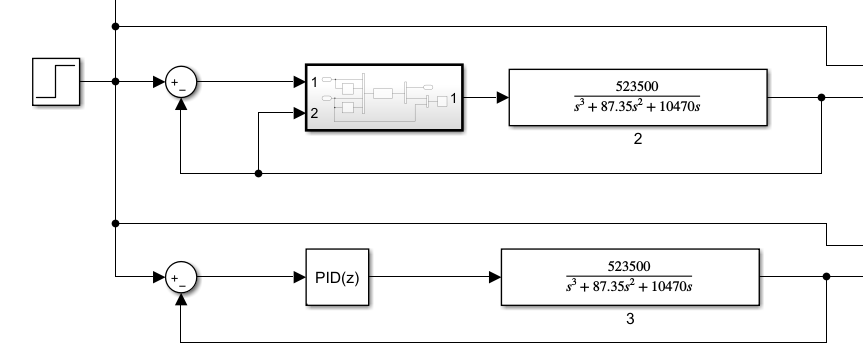
u(k)为控制量相当于状态量x与pid参数的线性组合,为了动态调整pid参数构建一个单神经元网络,性能指标函数取
J
=
∑
(
r
i
n
(
k
)
−
y
o
u
t
(
k
)
)
2
/
2
J=sum(rin(k)-yout(k))^2/2
J=∑(rin(k)−yout(k))2/2;根据梯度下降法调整pid参数,即
Δ
K
p
=
−
η
∂
J
∂
K
p
Delta K_p=-etafrac{partial J}{partial K_p}
ΔKp=−η∂Kp∂J,这个怎么求偏导?
Δ
K
p
=
−
η
∂
J
∂
K
p
=
−
η
∂
J
∂
y
o
u
t
∂
y
o
u
t
∂
Δ
u
∂
Δ
u
∂
K
p
=
η
.
e
o
r
r
o
r
(
k
)
.
x
(
1
)
.
∂
y
o
u
t
∂
Δ
u
Delta K_p=-etafrac{partial J}{partial K_p}=-etafrac{partial J}{partial yout}frac{partial yout}{partial Delta u}frac{partial Delta u}{partial K_p}=eta .eorror(k).x(1).frac{partial yout}{partial Delta u}
ΔKp=−η∂Kp∂J=−η∂yout∂J∂Δu∂yout∂Kp∂Δu=η.eorror(k).x(1).∂Δu∂yout,利用RBF网络的逼近能力,识别系统的Jacobian阵,即
∂
y
o
u
t
∂
Δ
u
frac{partial yout}{partial Delta u}
∂Δu∂yout。
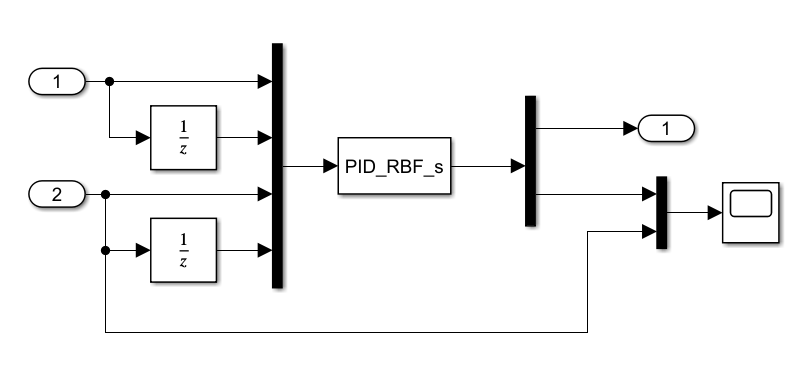
function [sys,x0,str,ts,simStateCompliance] = PID_RBF_s(t,x,u,flag)
% 网络结构3-6-1
% 采样时间
Ts = 0.001;
switch flag
case 0
[sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes(Ts);
case 2
sys=mdlUpdate(x,u,Ts);
case 3
sys=mdlOutputs(t,x,u);
case {1,4,9}
sys=[];
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes(Ts)
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 3;
sizes.NumOutputs = 2;
sizes.NumInputs = 4;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0;0];
str = [];
ts = [Ts 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlUpdate(x,u,Ts)
sys=[u(1);
x(2) + u(1)*Ts;
(u(1) - u(2))];
function sys=mdlOutputs(t,x,u)
persistent w w_1 w_2 h c PID_parm
% PID三个三个参数学习效率
xitePID = [1 1 1];
% RBF网络学习效率
xite = 0.5;
% RBF网络动量因子
alfa = 0.5;
% 高斯基函数宽度
b = 3;
if t == 0
% PID参数初值
PID_parm = [0.7 0 1];
% 高斯基函数中心矩阵,取值范围在输入信号范围内
c = [linspace(-1,1,6);linspace(0,1,6);linspace(0,1,6)];
h = zeros(6,1);
w = zeros(6,1);
w_1 = w;
w_2 = w_1;
end
uu = PID_parm*x;
RBF_input = [uu u(3) u(4)]';
for j = 1:6
h(j) = exp(-norm(RBF_input - c(:,j))^2/(2*b^2));
end
ymout = w'*h;
d_w = xite*(u(3) - ymout)*h;
w = w_1 + d_w + alfa*(w_1 - w_2);
yu = w.*h.*(-RBF_input(1) + c(1,:))'/b^2;
% Jacobian阵
dyout = sum(yu);
PID_parm = PID_parm + u(1)*dyout*x'.*xitePID;
w_2 = w_1;
w_1 = w;
sys = [uu;ymout];
最后
以上就是风趣西牛最近收集整理的关于RBF-PID的s-function实现以及Simulink的模块封装的全部内容,更多相关RBF-PID内容请搜索靠谱客的其他文章。








发表评论 取消回复