3 状态空间模型的建立
3.1 格式:G=ss(A,B,C,D)
A:系统矩阵(状态矩阵),描述系统状态的演化规律,是系统最关键的矩阵;
B:列向量;C:行向量;D:列向量

Continuous-time state-space model.
3.2 由状态空间模型转换为传递函数模型
把3.1中的G转换为等价的传递函数模型G1:tf(G)
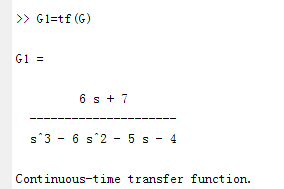
得到三阶系统对应的传递函数
3.3 由传递函数模型转换为状态空间模型
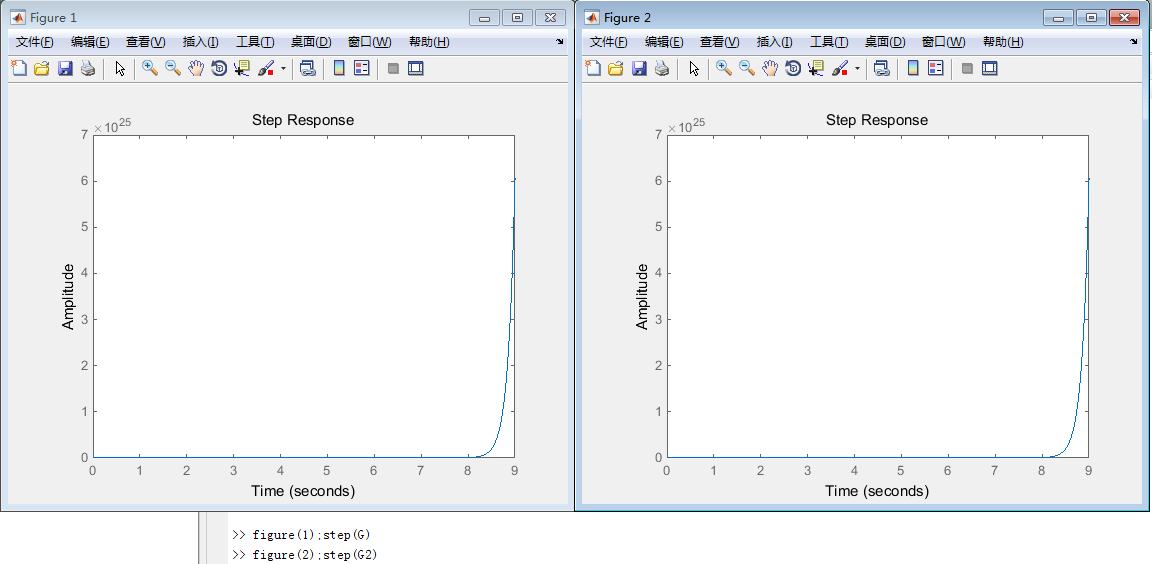
把3.2中的G1转换为等价的状态空间模型G2:ss(G1)
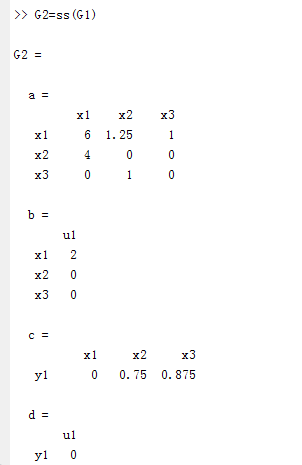
这里我们发现状态空间模型G2和G长的不一样,因为MATLAB更倾向于把系统转换为能观型矩阵,而不是能控型,其实G2和G等价的
最后
以上就是清爽发夹最近收集整理的关于MATLAB实现传递函数模型、零极点模型和状态空间模型的建立与转换(2)的全部内容,更多相关MATLAB实现传递函数模型、零极点模型和状态空间模型内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复