光伏-储能并网系统仿真(MATLAB/SIMULINK)-part2
如果不想看原理,可以直接点击文件下载连接
本文介绍如何利用MATLAB/SIMULINK完成一个光伏-储能并网系统的搭建。
一篇文章就能读懂光伏并网系统的控制,以及PI控制器的设计方法。
本文将会介绍四个部分:
- 整体系统控制逻辑
- 光伏并网逆变器的控制理论(dq解耦控制)
- 光伏MPPT控制以及恒功率控制
- 电池的功率控制
每个部分都会包括:
- 控制器原理
- PI控制器参数理论计算
注:该文章的part1介绍了前两个部分。这篇文章是part2,介绍后两个部分。
3. 光伏MPPT控制以及恒功率控制
3.1 光伏MPPT控制
MPPT英文全称为Maximum Power Point Tracking,即最大功率点跟踪。之所以说光伏存在“最大功率点”,是因为在确定的光照条件和环境温度下光伏的功率会随着端口电压的增加呈现先增大后减小的现象。如图1所示。
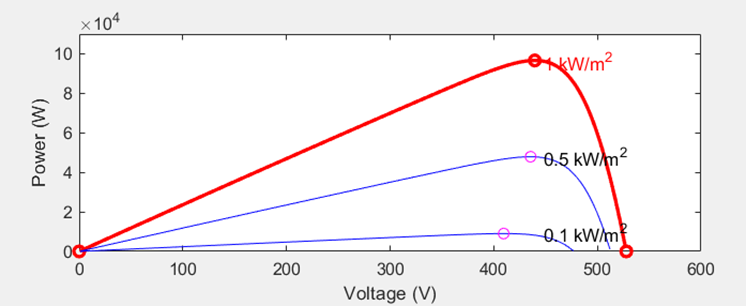
从图1可以看出,我们可以通过调整端口电压来改变光伏的输出功率。那么所谓的MPPT就是通过改变光伏输出电压来使得光伏的输出功率最大。
常见的MPPT方法有扰动观察法和电导增量法。本文介绍电导增量法。
电导增量法
固定光照和温度时,我们可以把光伏输出功率
P
P
P看作是端口电压
U
U
U的函数。函数如图1所示,呈现先增大后减小的现象。如果我们认为函数
P
(
U
)
P(U)
P(U)是可微的(工程上的函数就是这么性质优良 ???? ),则微分后可以得到如下结果:
d
P
d
U
=
d
I
d
U
U
+
I
(
1
)
dfrac{dP}{dU}=dfrac{dI}{dU}U+I (1)
dUdP=dUdIU+I(1)其中,I是光伏的输出电流。(上面推导中用到了关系
P
=
U
I
P=UI
P=UI)
对式(1)左右两边同时除以
U
U
U可以得到如下公式:
1
U
d
P
d
U
=
d
I
d
U
+
I
U
(
2
)
dfrac{1}{U}dfrac{dP}{dU}=dfrac{dI}{dU}+dfrac{I}{U} (2)
U1dUdP=dUdI+UI(2)
式(2)的右侧就是“电导增量法”中定义的“电导”。该“电导”的数学意义就是
P
P
P对于
U
U
U的导数,并且再除以U。
进一步,我们如果令式(2)等于电压关于时间的导数,可以得到如下公式:
1
U
d
P
d
U
=
d
I
d
U
+
I
U
=
C
0
d
U
d
t
(
3
)
dfrac{1}{U}dfrac{dP}{dU}=dfrac{dI}{dU}+dfrac{I}{U} = C_0dfrac{dU}{dt} (3)
U1dUdP=dUdI+UI=C0dtdU(3)其中,
C
0
C_0
C0是一个正常数。
我们来考察一下式(3),看它是否能实现MPPT。
首先,我们知道由于P随着U先增大后减小,那么
1
U
d
P
d
U
dfrac{1}{U}dfrac{dP}{dU}
U1dUdP必然会呈现如图2所示的形式:
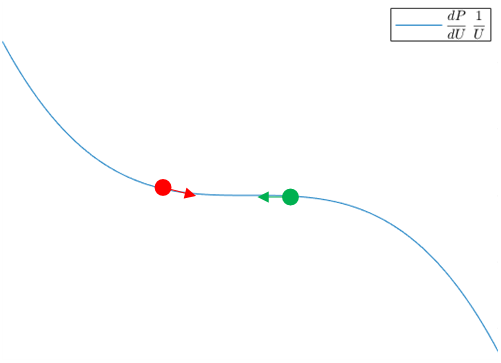
因此按照式(3),当
U
U
U大于最大功率点时,
d
U
d
t
frac{dU}{dt}
dtdU会等于一个负值,从而电压会减小并收敛到最大功率点(即
d
U
d
t
=
0
frac{dU}{dt}=0
dtdU=0的点)。而当
U
U
U小于最大功率点时,电压会随着时间增大,也会最终收敛到最大功率点。
至此,我们知道按照公式(3)设计控制器,我们就可以实现MPPT。
在我们的这个系统中,逆变器控制了直流母线电压的稳定为750V。由于光伏端口电压始终小于750V,因此可以选用单向的boost电路实现电能变换。假设boost电路的占空比为D,并且给定一个初始偏置,则得到
D
=
D
i
n
i
t
−
Δ
D
D=D_{init}-Delta D
D=Dinit−ΔD。则可以得到光伏端口电压
U
U
U与
U
b
u
s
U_{bus}
Ubus之间的关系如下所示:
U
=
(
1
−
D
i
n
i
t
+
Δ
D
)
U
b
u
s
(
4
)
U = (1-D_{init}+Delta D)U_{bus} (4)
U=(1−Dinit+ΔD)Ubus(4)
令式(3)的
C
0
C_0
C0为
1
/
U
b
u
s
1/U_{bus}
1/Ubus,则可以得到占空比调节的公式为:
d
I
d
U
+
I
U
=
d
Δ
D
d
t
⇔
Δ
D
=
∫
d
I
d
U
+
I
U
d
t
(
5
)
dfrac{dI}{dU}+dfrac{I}{U}=dfrac{dDelta D}{dt} Leftrightarrow Delta D=int dfrac{dI}{dU}+dfrac{I}{U} dt (5)
dUdI+UI=dtdΔD⇔ΔD=∫dUdI+UIdt(5)
根据式(5),我们可以发现理论上,只需要利用积分器就可以实现MPPT,但是可以利用P,以增加其响应速度。
但是还有一个小问题,即如何计算电导呢?
最直接的想法是直接测量
I
I
I和
U
U
U,然后再记录下上一个时刻的
I
I
I和
U
U
U,利用一阶差分来得到
d
I
d
U
dfrac{dI}{dU}
dUdI的近似值。但是这样的方法必然会引入很多的测量误差,并可能导致系统的不稳定。
现介绍一种解决方法。
计算
I
U
frac{I}{U}
UI:
分别对
I
I
I和
U
U
U取平均。相当于是一种低通滤波。例如控制周期为
T
s
T_s
Ts,可以设定采用周期为
T
s
/
10
T_s/10
Ts/10,这样可以取十个采样点的平均值进行计算。(平均实际上是一种较为简单的低通滤波)
计算
d
I
d
U
frac{dI}{dU}
dUdI:
利用傅里叶分解,可以实现计算。分别取电压和电流傅里叶变换第一次谐波对应的赋值和相位,利用如下公式计算:
d
I
d
U
≈
I
1
U
1
c
o
s
(
θ
I
−
θ
U
)
(
6
)
frac{dI}{dU}approx dfrac{I_1}{U_1}cos(theta_I-theta_U) (6)
dUdI≈U1I1cos(θI−θU)(6)
至此,利用电导增量法实现MPPT就全部介绍完毕。
3.2 光伏恒功率控制
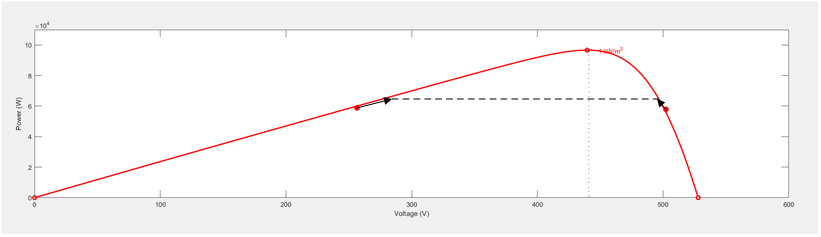
如图3所示,对光伏板进行恒功率控制时,需要识别电压所处的区间。
当电压低于最大功率点所对应的电压时(即位于左侧时),电压需要增大以增大输出功率。反之,当电压高于最大功率点所对应的电压时(即位于右侧时),电压需要减小以增大输出功率。
电压所处的区域可以由电导增量法所定义的电导确定。当电导(
d
I
d
U
+
I
U
dfrac{dI}{dU}+dfrac{I}{U}
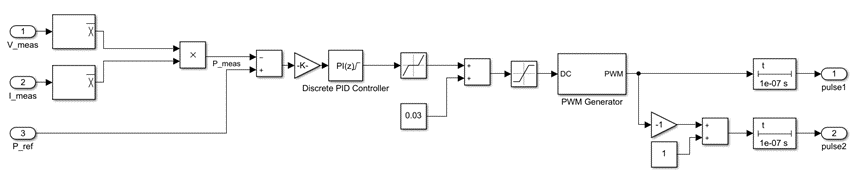
dUdI+UI)大于零,说明电压位于左侧,反之在右侧。由电导确定了电压所处区域后,便可以通过PI控制器调节输出电压以实现功率恒定。
图4展示了通过计算得到的电导来改变符号函数sign的输出,进而改变占空比的调整方向。

至此,整个系统的控制逻辑以及控制器的设计就讲解完毕。
欢迎下载仿真文件。
最后
以上就是重要小蜜蜂最近收集整理的关于光伏-储能并网系统仿真(MATLAB/SIMULINK)-part2光伏-储能并网系统仿真(MATLAB/SIMULINK)-part2的全部内容,更多相关光伏-储能并网系统仿真(MATLAB/SIMULINK)-part2光伏-储能并网系统仿真(MATLAB/SIMULINK)-part2内容请搜索靠谱客的其他文章。








发表评论 取消回复