目录
一、机架
二、电机参数
1、电机的尺寸和KV值
2、KV值与力、桨的关系
三、桨叶参数
1、桨叶的直径和螺距
2、桨叶选配
3、电机与桨叶搭配表
四、电池与电调
五、航模电子设备连线图解
1、固定翼整机
2、多旋翼整机
3、接收机
4、带sbus输出的接收机与舵机的连接方式
5、数传系统
6、滑翔机采购清单
六、电机与运动(X型)
1、四旋翼航向与电机转向关系
2、电机转速与飞机四个通道运动关系
3、四旋翼无人机姿态表示:坐标系与欧拉角的定义关系
(1)机体坐标系的表示
(2)欧拉角定义
七、PID
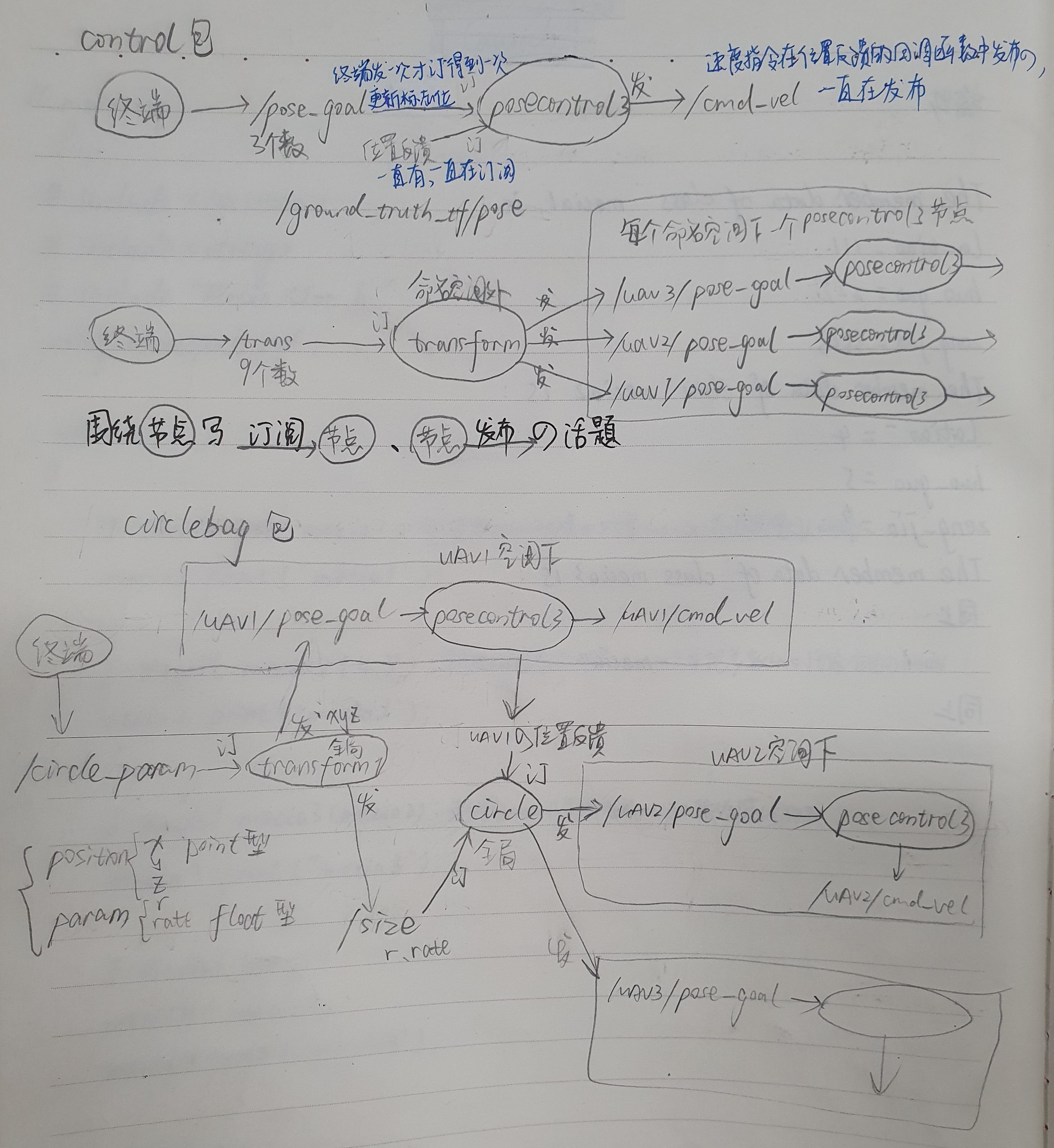
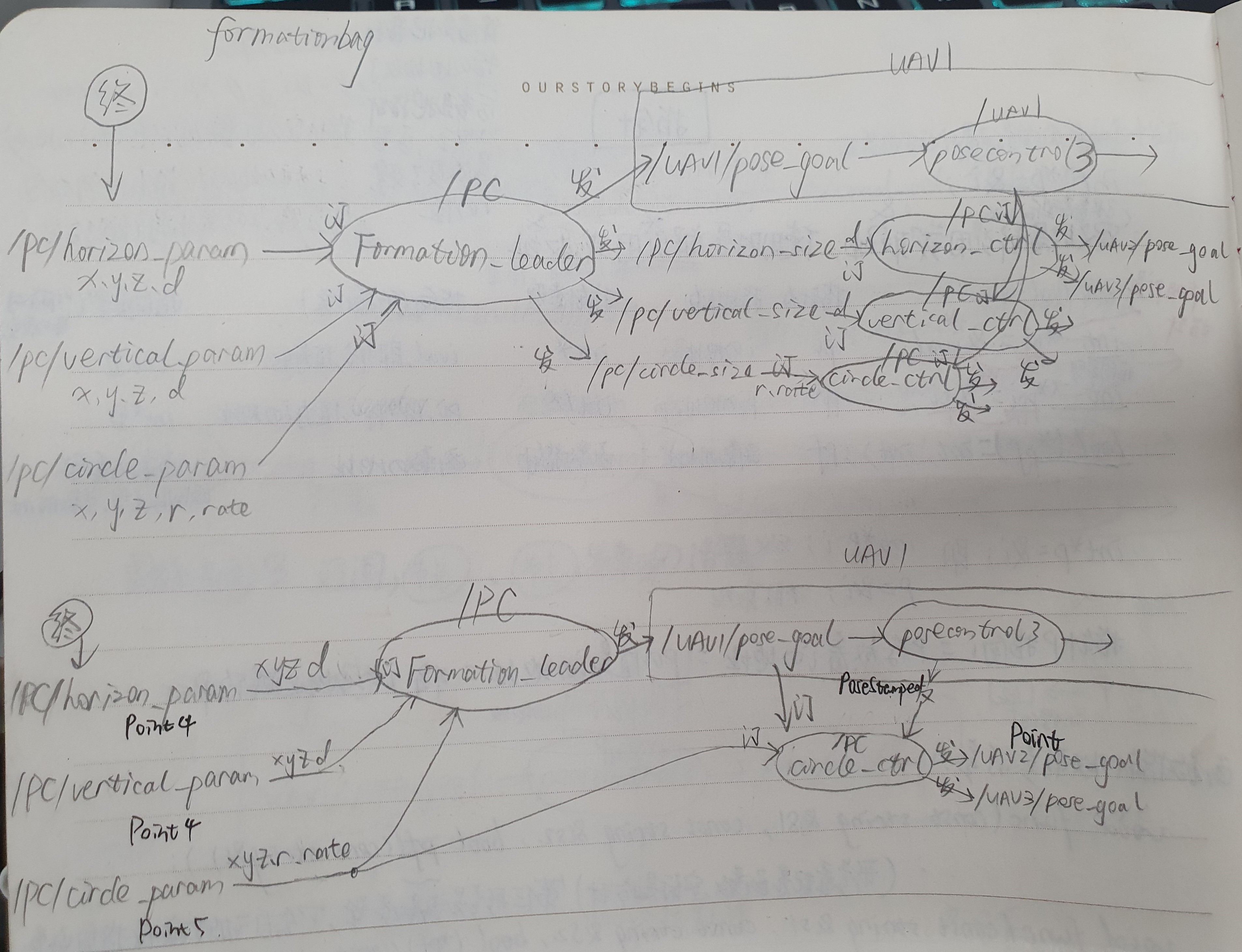
八、基于ROS、Gazebo、hector_quadrotor模型的无人机编队仿真系统框架图
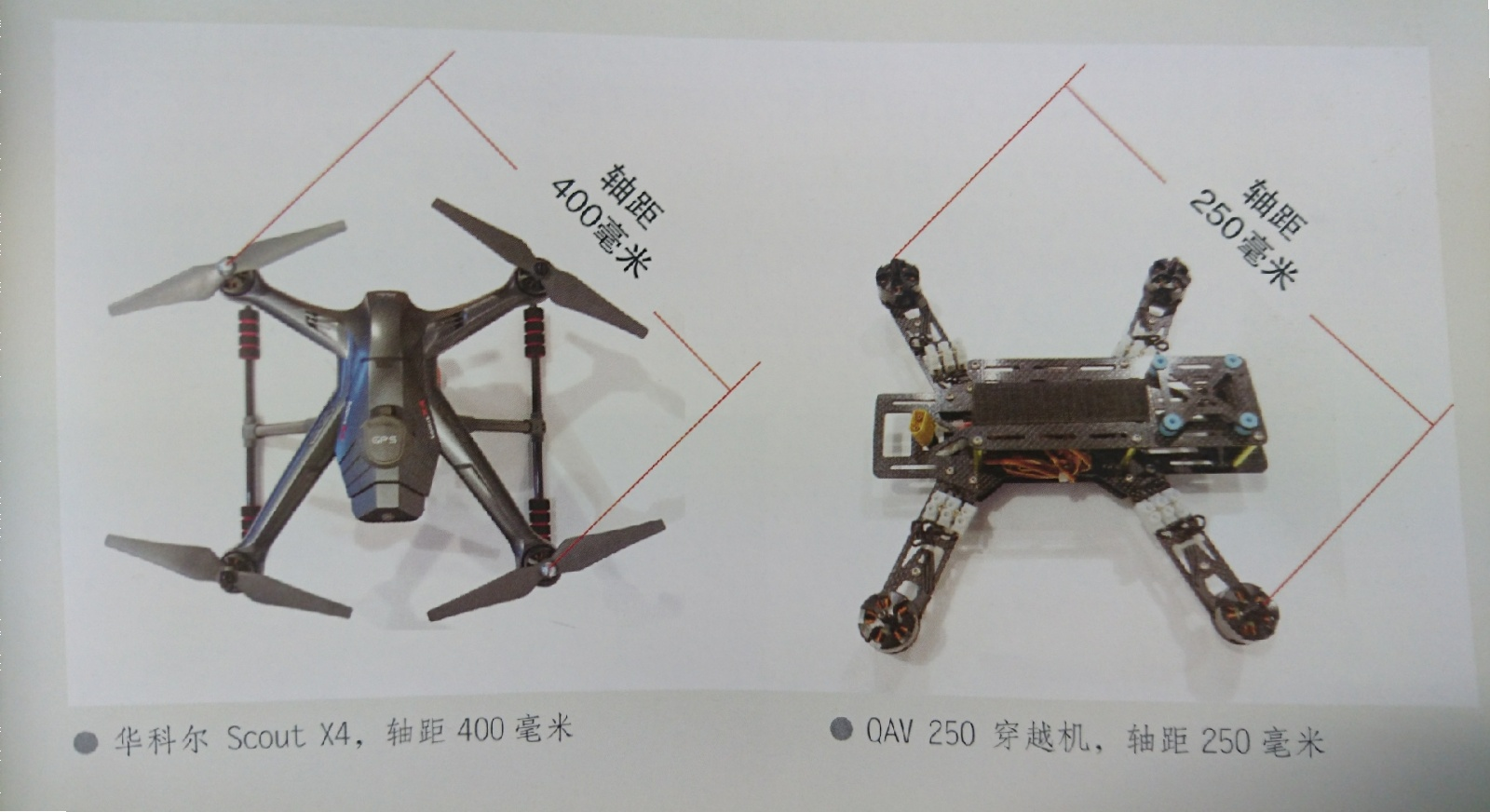
一、机架
四轴常见轴距:250mm、330mm、380mm、450mm、500mm
重量参考:冲浪者600g,植保无人机15kg左右,大疆八轴s1000是4.4kg,六轴s8000不知道多重,反正贼重。
二、电机参数
1、电机的尺寸和KV值
- 尺寸:如2212,指直径22mm高度12mm。
- KV值:低的有3-5百,高的有3-5千,表示 电压每升高1V,电机增加的转速。

电机参数参考:1.2m滑翔机2216/1400kv,1.4m冲浪者2212/2200kv
2、KV值与力、桨的关系
KV值越大,速度越快,但是力量越小;KV值越小,速度越慢,但是力量越大;如果不能理解的,可以想想汽车的档位,汽车挂一档时,力量最大,但是速度最慢,挂五档时,力量最小,但速度最快。
一般相对而言: KV值低的电机,绕线细,匝数多,转速慢,扭力大,载重大,适合配大桨。 KV值高的电机,绕线粗,匝数少,转速快,扭力小,载重小,适合配小桨。
扭矩:扭矩用来克服空气阻力的 输出的扭矩是要和阻力匹配的 多大阻力就是多大扭矩 螺旋桨受到的阻力和桨的直径 螺距 桨面积大小都有关系 关系最大的就是直径 所以大螺旋桨 阻力就大 就要让电机输出的扭矩也大 kv越小相同电压下转速越小 P=FV 因而力量越大 所以kv就要低一些 这样才能把更多的功率分配到力量上 也就是扭矩上
三、桨叶参数
1、桨叶的直径和螺距
比如标识9450的桨叶,就是转动圆周直径9.4英寸,叶片螺距50度。
2、桨叶选配
桨叶与空气的作用力,除了产生垂直向上的推力外,还产生横向的水平推力,使空气旋转。一般希望横向推力越小越好。螺距越大,横向推力越大,力效越低。 四旋翼采用2只电机正转,2只电机反转,以相互抵消横向推力。飞机改变航向,要用到横向推力。
选配桨叶,要根据四旋翼的载重,电机的性能指标,选配合适的桨叶,达到最佳效率。
一般低速电机配大浆,高速电机配小浆。载重量大配大桨,载重量小配小桨。选用细长的桨叶,效率会更高。
选配的桨叶面积越大,推力越强,四旋翼为了维持飞行平衡,就自动降低电机转速,电机转速越低,电流越大,发热多,能耗高。所以,用同样一块电池,采用大面积桨叶,飞行时间会短一些。
3、电机与桨叶搭配表
仅供参考:
采用三节锂电池串联的电池组(3S),电池组电压11.1V;
- KV900-1000的电机配1060或1047浆,9寸浆也可以。
- KV1200-1400配950(9寸浆)至8*6浆
- KV1600-1800左右的7寸至6寸浆
- KV2200-2800左右的5寸浆 KV3000-3500左右的4530浆
采用两节锂电池串联的电池组(2S),电池组电压7.4V;
- KV1300-1500左右用950浆
- KV1800左右用760浆
- KV2500-3000左右用5X3浆
- KV3200-4000左右用4.5x3.0浆
四、电池与电调
电池容量:2200mAh,表示以2200MA电流放电,能提供1小时电能
放电倍率C:指电池的放电能力,最大电流是:容量与放电倍率C的乘积,如5400MAH,30C的电池,最大短路电流是:5.4X30=162A(安培),四旋翼采用无刷电机,功率很大,工作电流大,可达到10几安培,所以航模电池放电倍率大的电池组,一般是20C,30C,40C
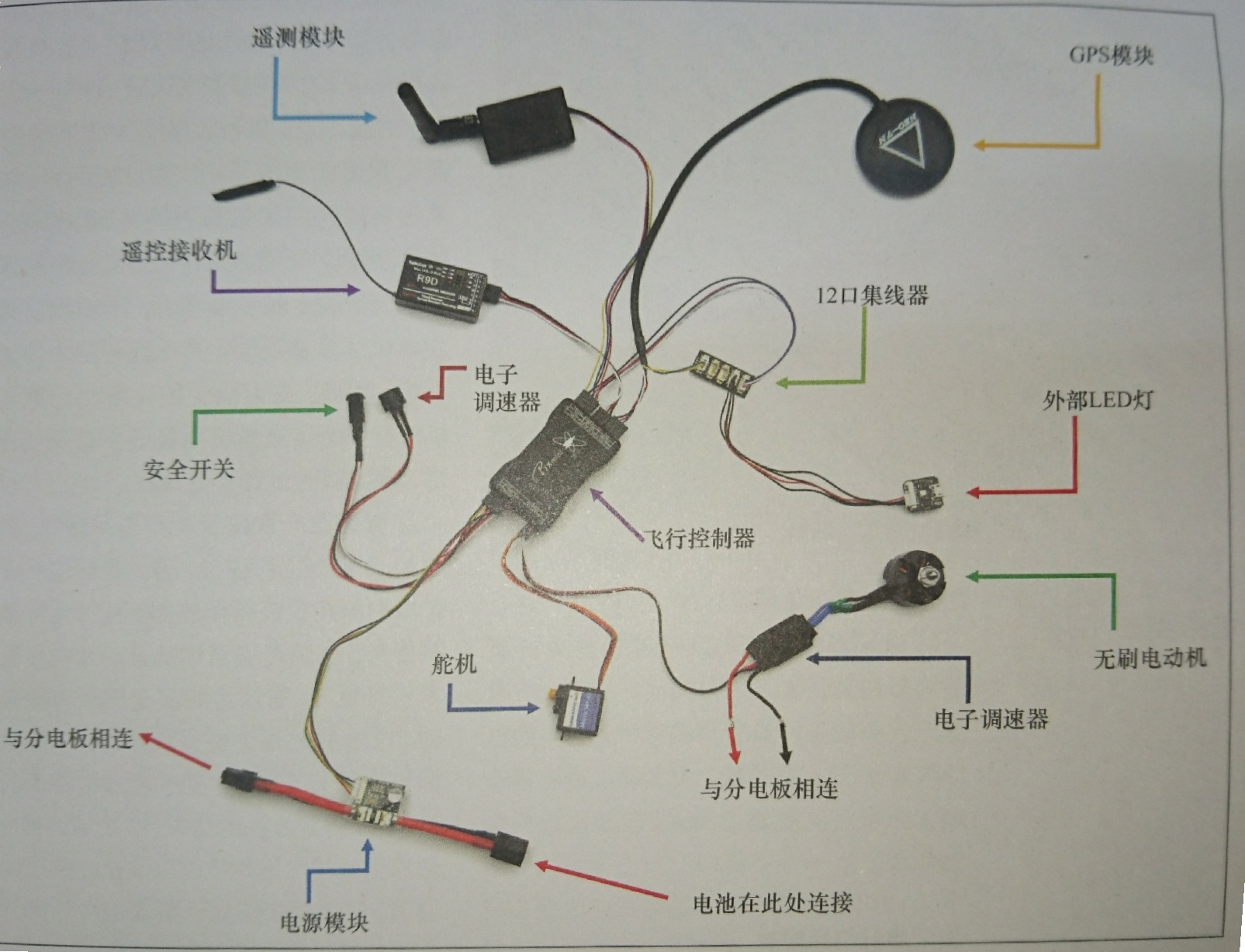
五、航模电子设备连线图解
1、固定翼整机
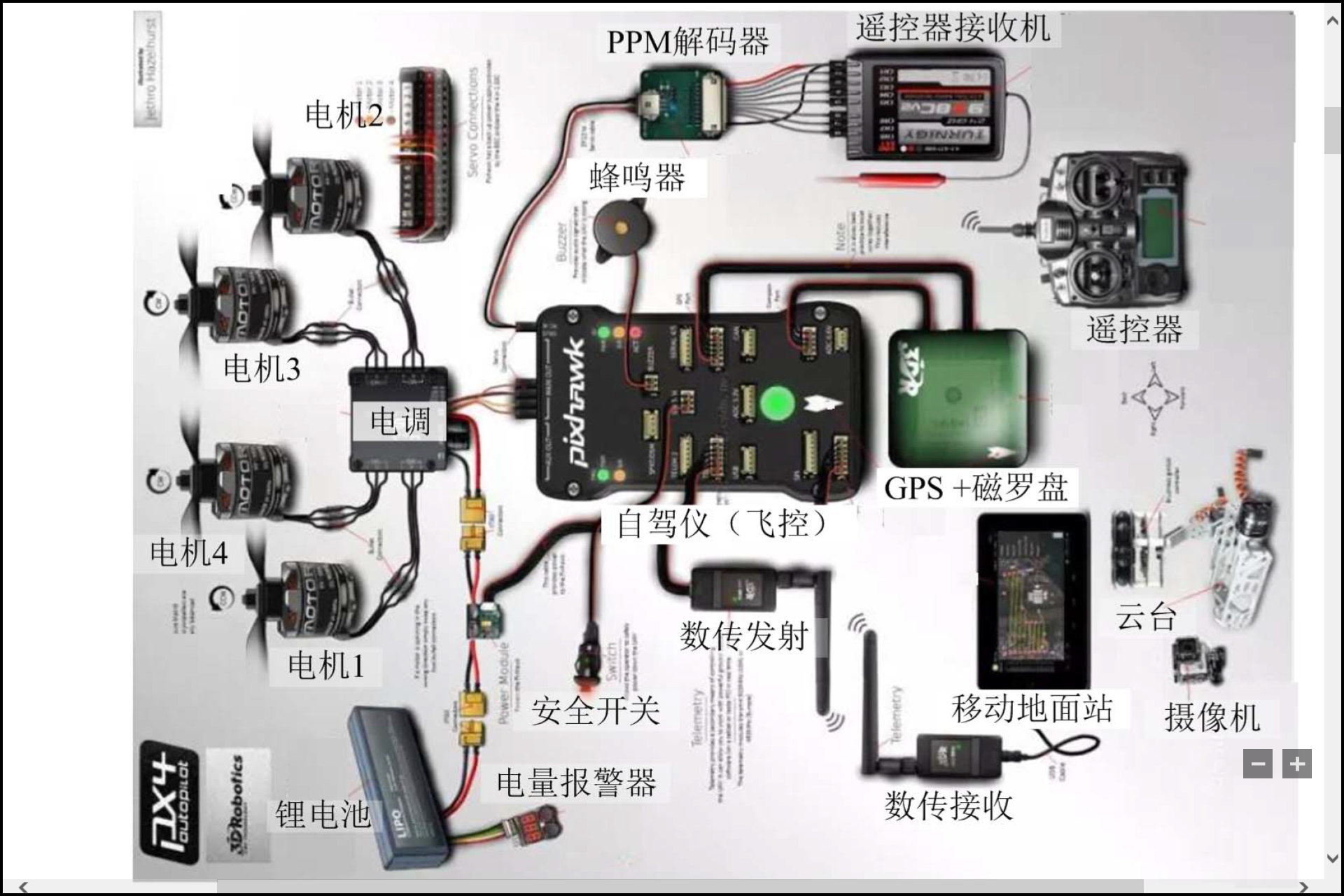
2、多旋翼整机
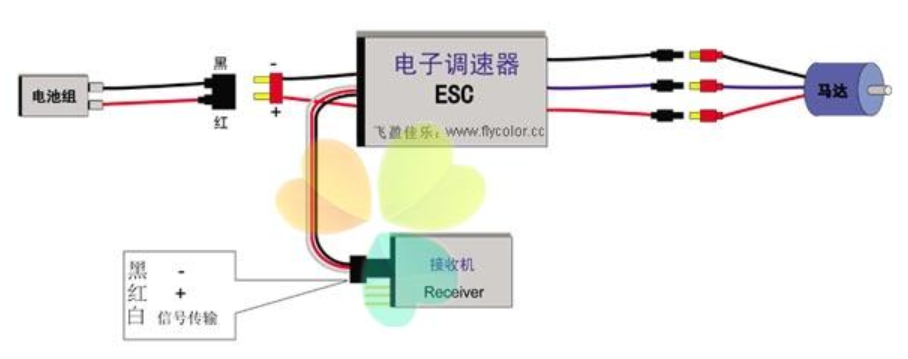
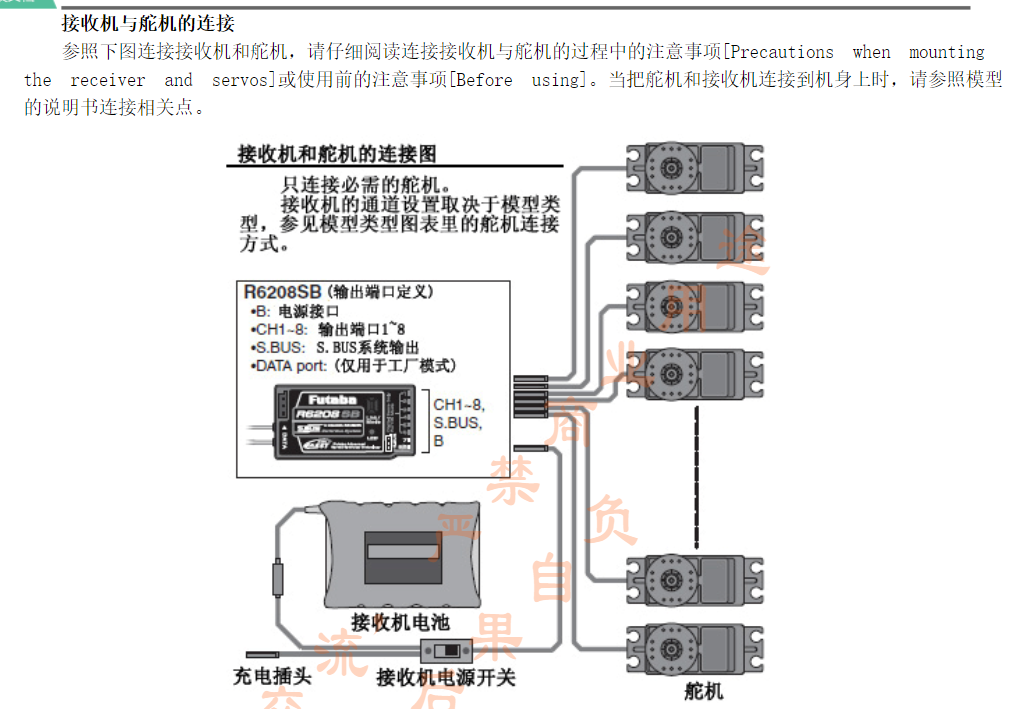
3、接收机
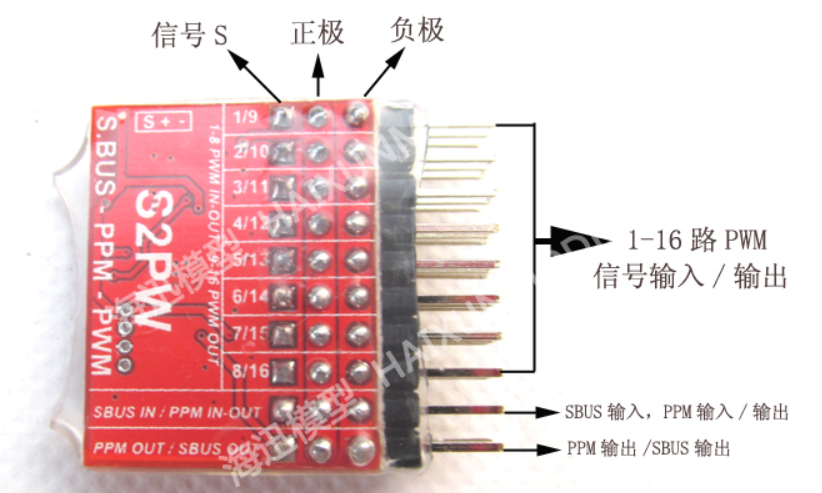
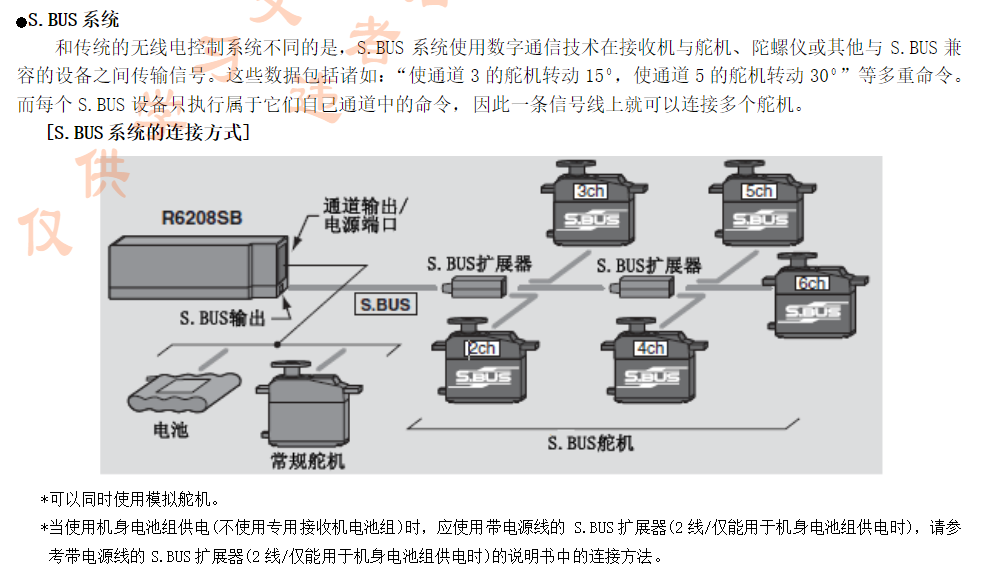
4、带sbus输出的接收机与舵机的连接方式
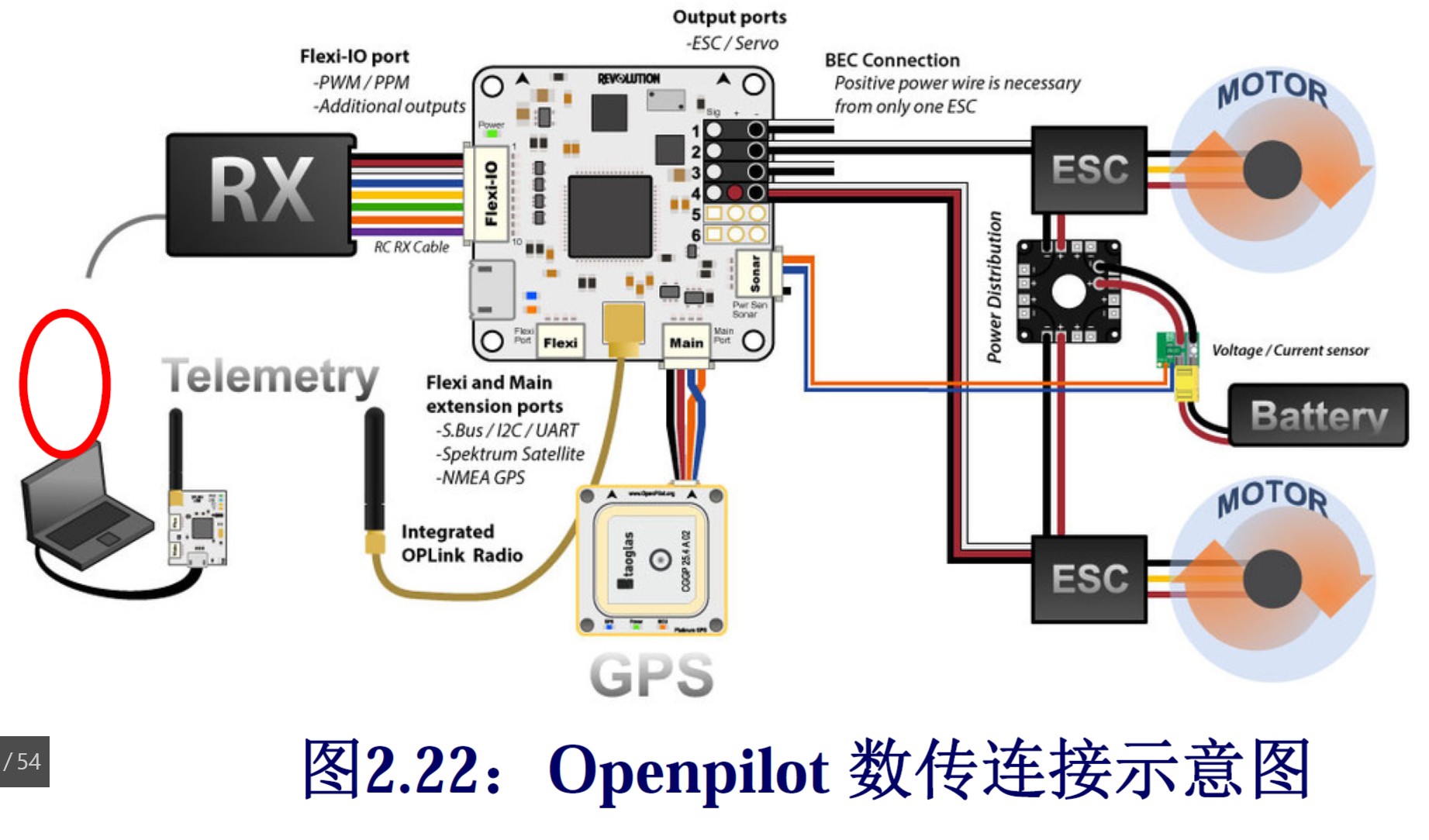
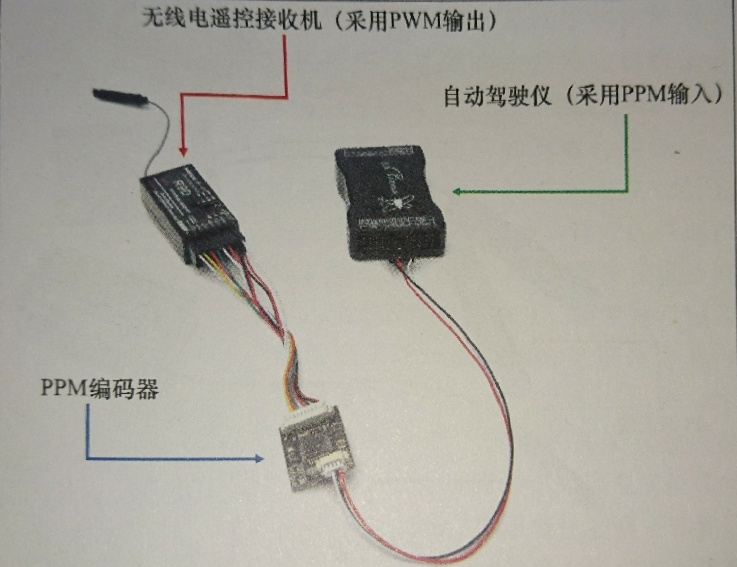
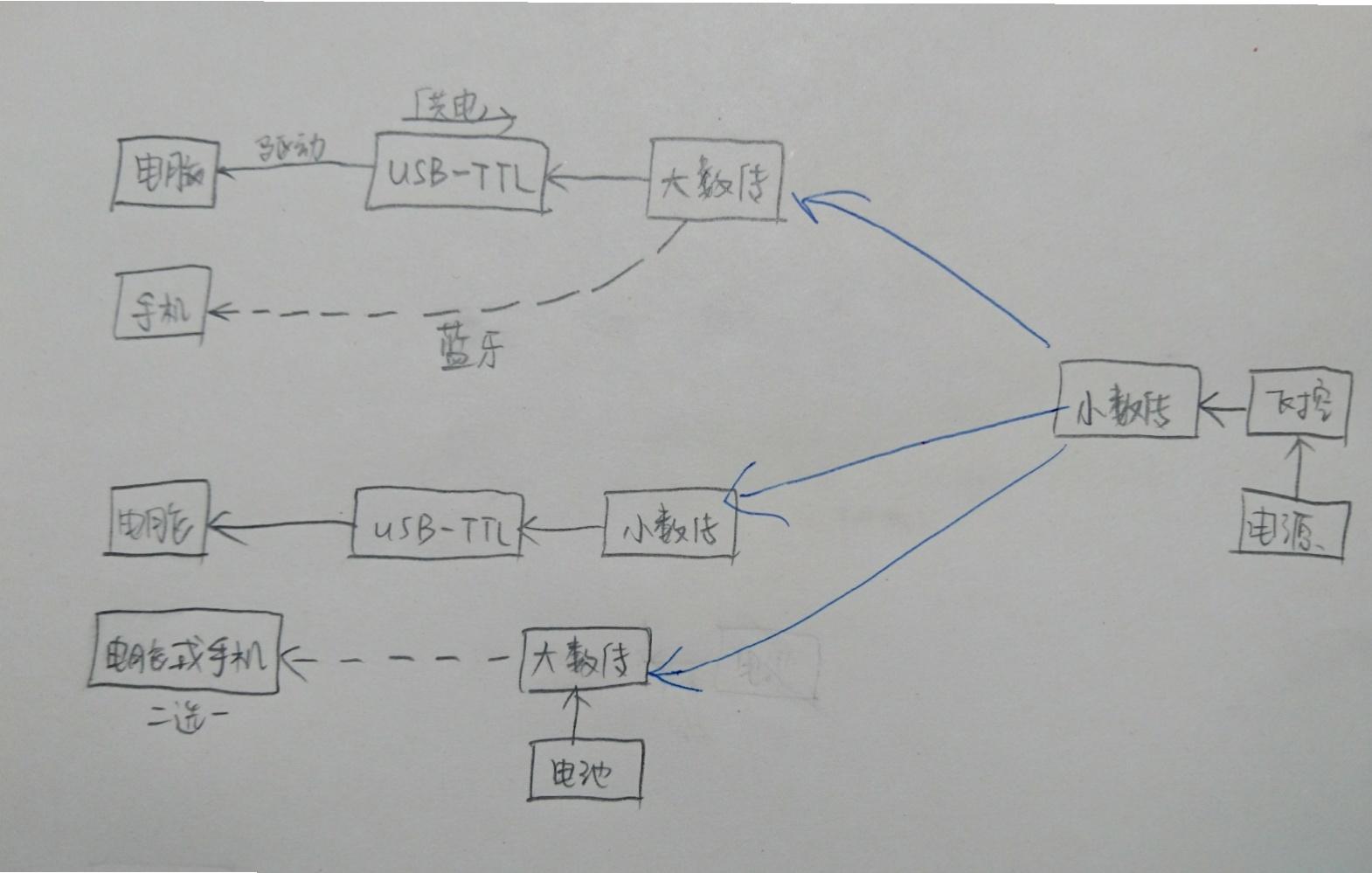
5、数传系统
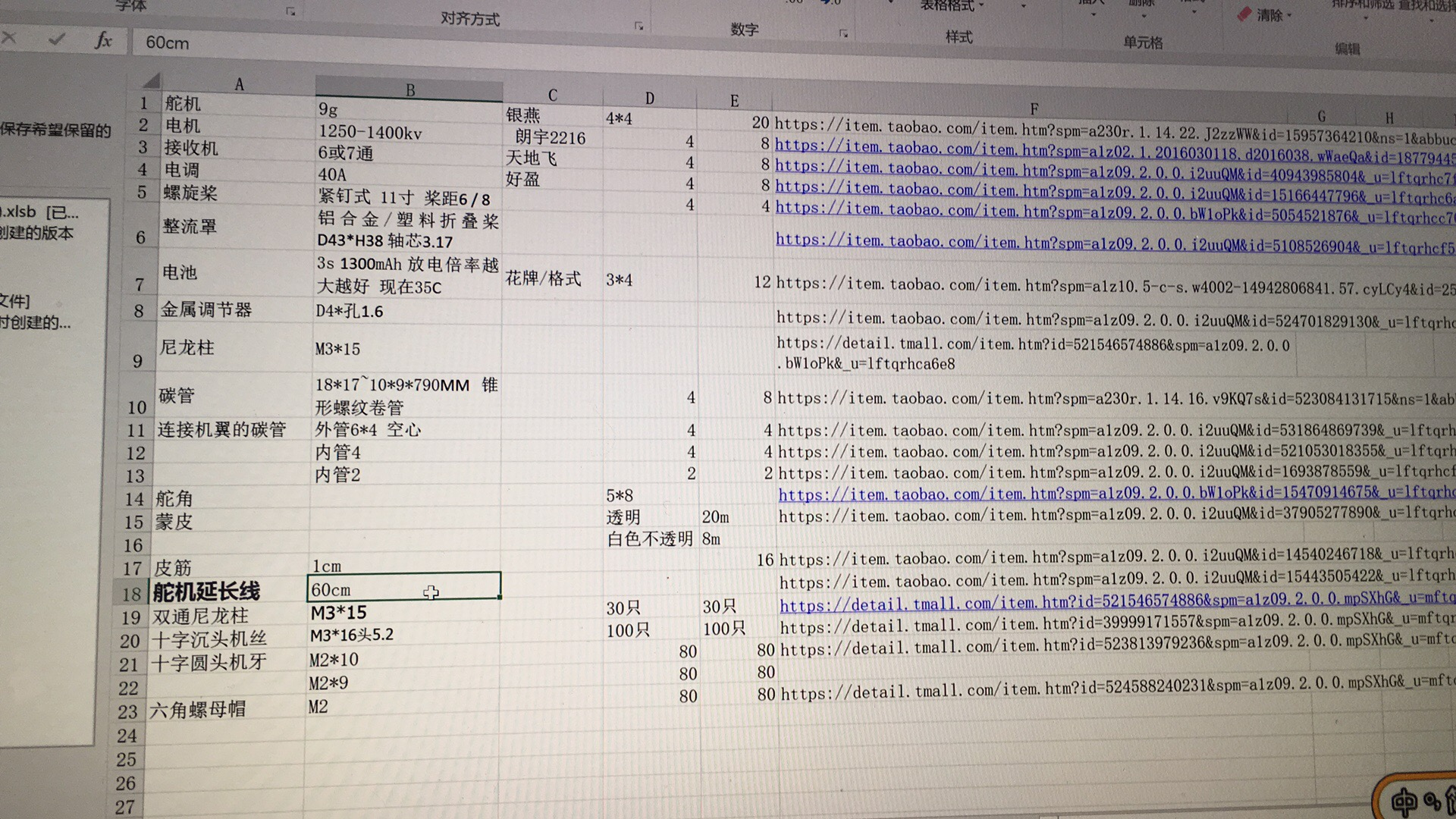
6、滑翔机采购清单
六、电机、运动与坐标系(以下都以X型四旋翼为例)
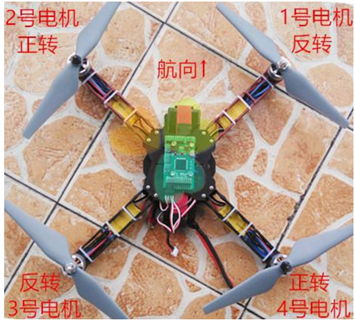
1、四旋翼航向与电机转向关系

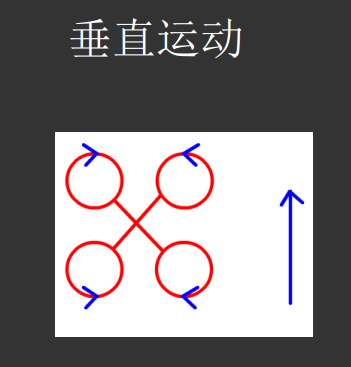
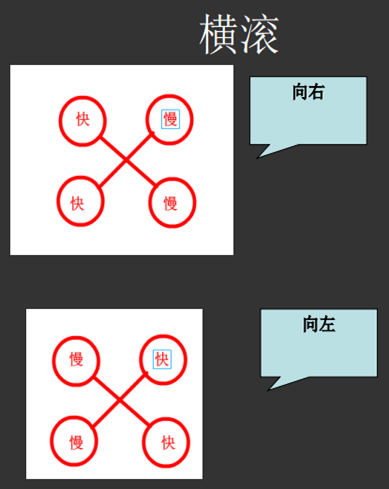
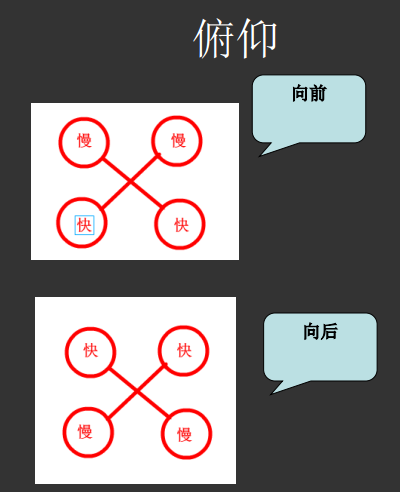
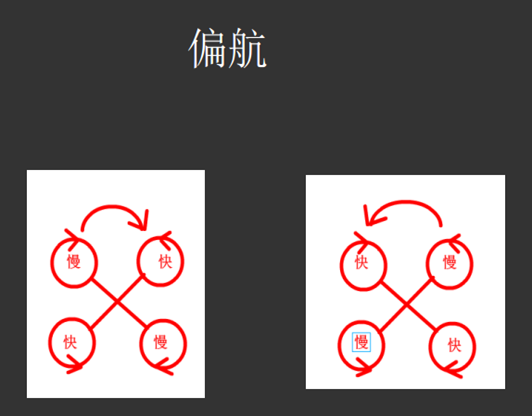
2、电机转速与飞机四个通道运动关系
关于四旋翼的横滚、俯仰、偏航运动,网上那么多资料都说的是十字型的。
但是,实物到手看看两个电机还是一个电机在打头阵就知道了,拿到实物的四旋翼无人机百分之90都是X型机架!!!市面上卖的航拍的大疆的、迷你的PCB板儿有刷的、穿越机的,包括做科研自己攒的都是X型。十字型根本不好用、没人用、用不着啊,除了控制理论领域。
所以十字型、X型资料鱼龙混杂。 X型四旋翼运动时电机变化根本不是那种画的很漂亮的、流传很广的十字型示意图的俯仰、横滚、偏航,x y z坐标系定义也根本不一样。
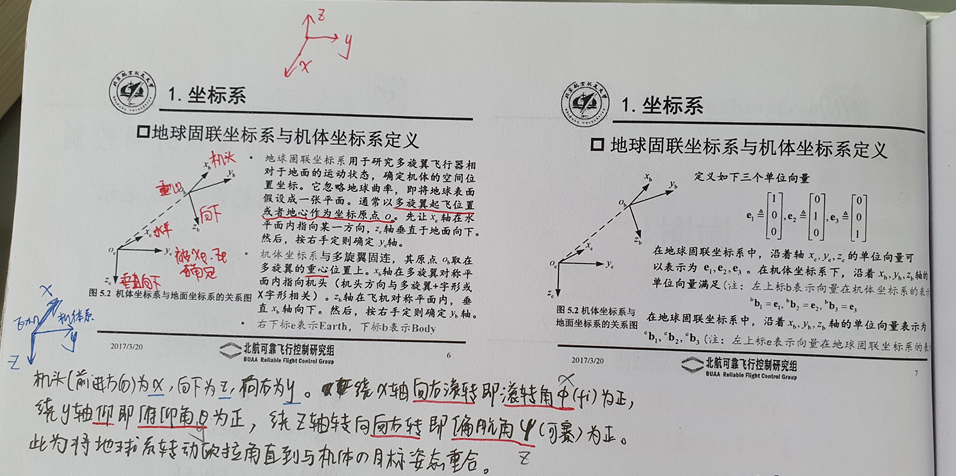
3、四旋翼无人机姿态表示:坐标系与欧拉角的定义关系
(1)机体坐标系的表示
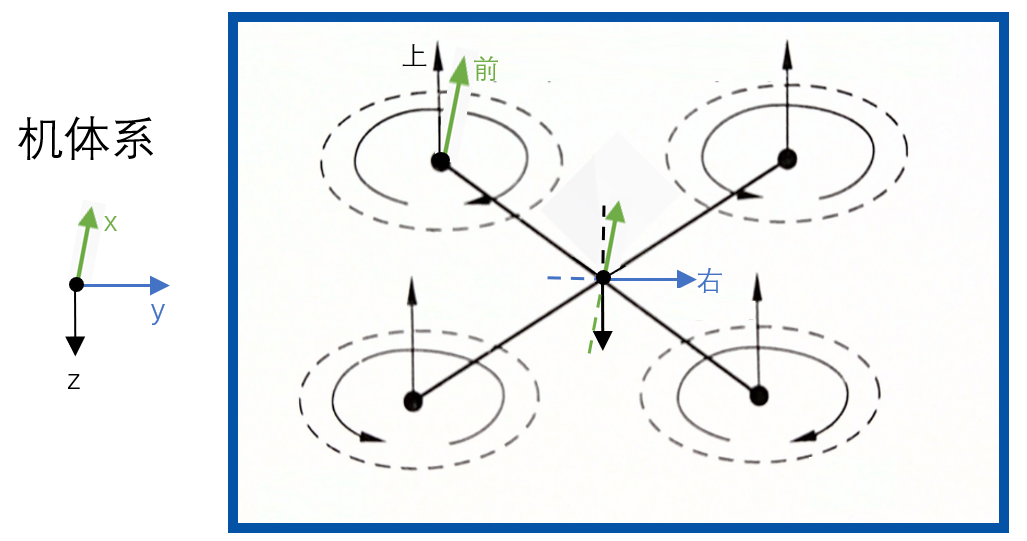
(2)欧拉角定义
将欧拉角定义为:飞机从世界系变化到机体系(从大地→飞机的目标姿态),分别绕着自己的x、y、z轴旋转了ϕ、θ、ψ。
用欧拉角进行姿态表示,其变化能够表示出机体旋转角速度。
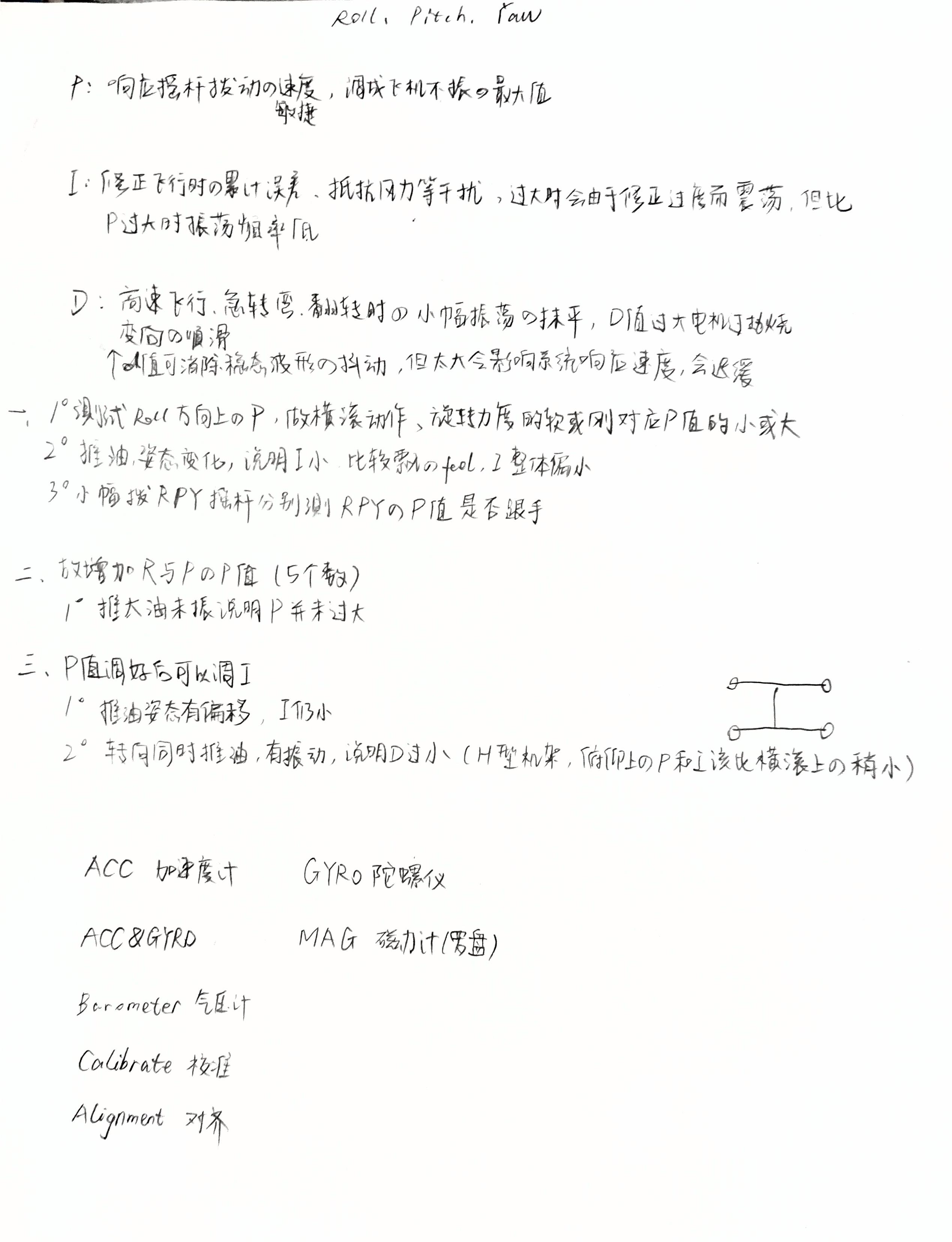
七、PID
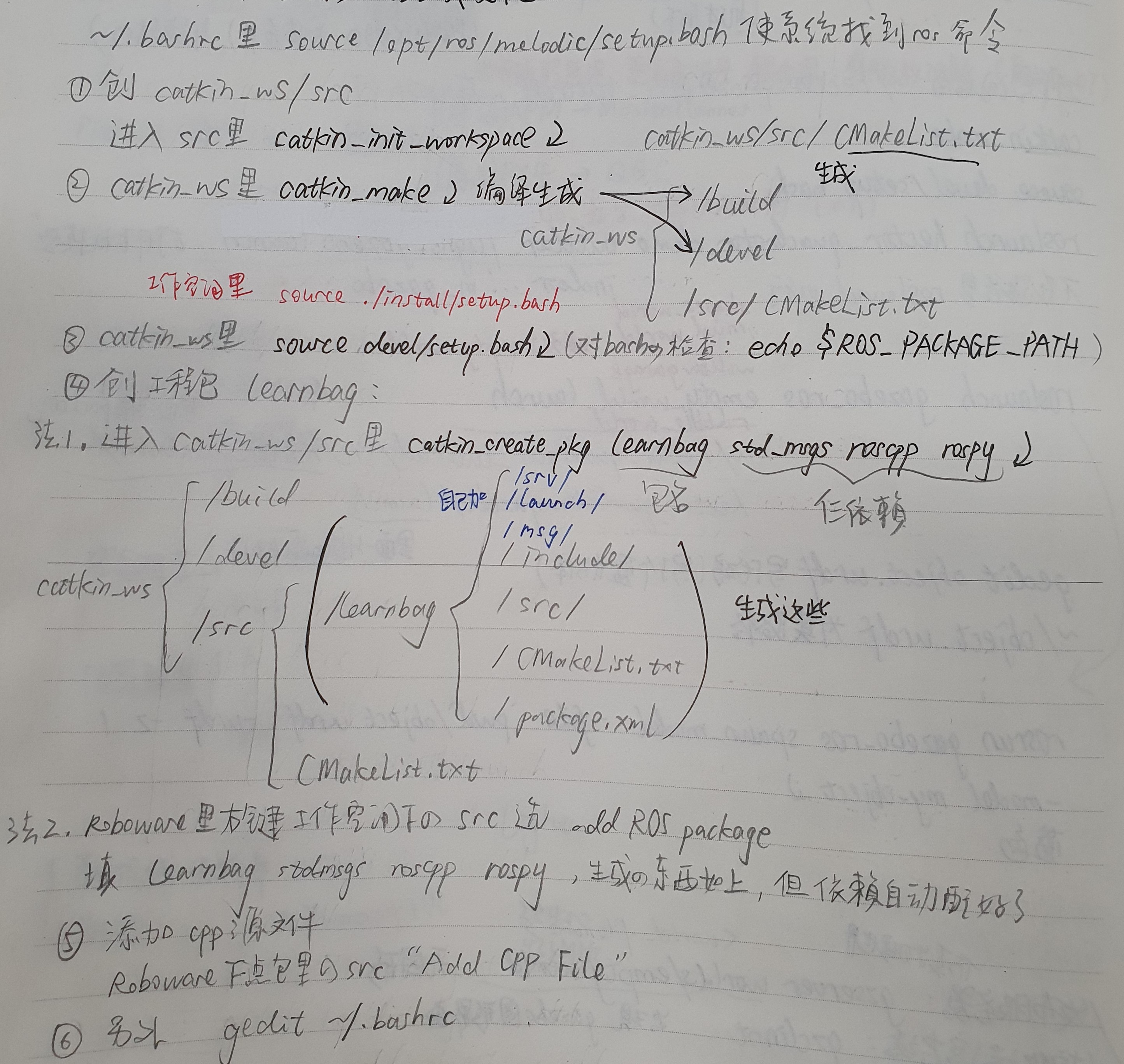
八、基于ROS、Gazebo、hector_quadrotor模型的无人机编队仿真系统框架图
最后
以上就是怡然毛豆最近收集整理的关于固定翼航模及四旋翼无人机基础一、机架二、电机参数三、桨叶参数四、电池与电调五、航模电子设备连线图解六、电机、运动与坐标系(以下都以X型四旋翼为例)七、PID八、基于ROS、Gazebo、hector_quadrotor模型的无人机编队仿真系统框架图的全部内容,更多相关固定翼航模及四旋翼无人机基础一、机架二、电机参数三、桨叶参数四、电池与电调五、航模电子设备连线图解六、电机、运动与坐标系(以下都以X型四旋翼为例)七、PID八、基于ROS、Gazebo、hector_quadrotor模型内容请搜索靠谱客的其他文章。








发表评论 取消回复