基于matlab简单仿真机器人
文章目录
- 基于matlab简单仿真机器人
- 前言
- 一、机器人连杆
- 二、机器人轨迹规划
前言
随着科学技术的发展和人们生活水平的不断提高,人们的日常生活与机器人的关系越来越密切,机器人种类繁多,这里的机器人系统着重针对足式机器人、仿生机器人、外骨骼机器人、关节型机器人等伺服机构偏多、控制精度要求较高、市面上又无现成商品化控制系统硬件的机器人系统。无人机、无人车领域建议去专业论坛求索。 现代控制系统,规模越来越大,系统越来越复杂,用传统的控制理论方法已不能满足控制的要求。机器人控制是在典型控制理论和现代控制理论的基础上发展起来的,由此控制机器拧螺丝应时代而生,替代了手工式拧螺丝的费时、繁琐、效率低下等问题,为生产加工制造等提供了极大的便利。
一、机器人连杆
机器人是由多个连杆连接而成的,机器人关节分为旋转关节和移动关节。在 matlab 创建机器人的两个最重要的函数是:Link
一个Link 包含了机器人的运动学参数、动力学参数、刚体惯性矩参数、电机和传动参数。
操作函数:
%A 连杆变换矩阵
% RP 关节类型: ‘R’ 或 ‘P’
% friction 摩擦力
% nofriction 摩擦力忽略
% dyn 显示动力学参数
% islimit 测试关节是否超出软限制
% isrevolute 测试是否为旋转关节
% isprismatic 测试是否为移动关节
% display 连杆参数以表格形式显示
% char 转为字符串
运动学参数:
% theta 关节角度
% d 连杆偏移量
% a 连杆长度
% alpha 连杆扭角
% sigma 旋转关节为 0,移动关节为 1
% mdh 标准的 D&H 为 0,否则为 1
% offset 关节变量偏移量
% qlim 关节变量范围[min max]
动力学参数:
% m 连杆质量
% r 连杆相对于坐标系的质心位置 3x1
% I 连杆的惯性矩阵(关于连杆重心)3x3
% B 粘性摩擦力(对于电机)1x1 或 2x1
% Tc 库仑摩擦力 1x1 或 2x1
电机和传动参数:
% G 齿轮传动比
% Jm 电机惯性矩(对于电机)
Link 调用格式:
(1)L = Link() 创建一个带默认参数的连杆
(2)L = Link(L1)复制连杆L1
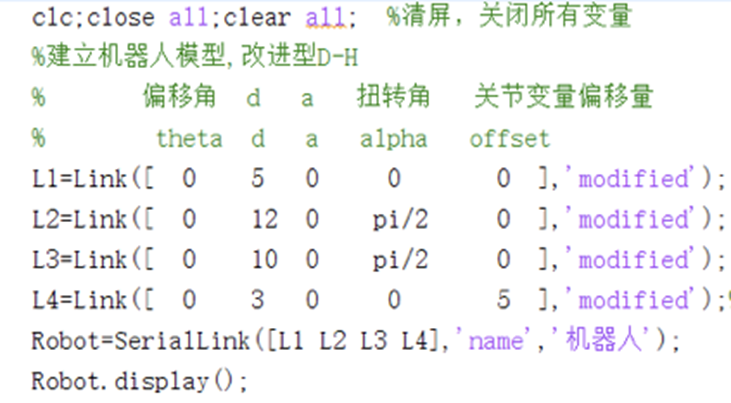
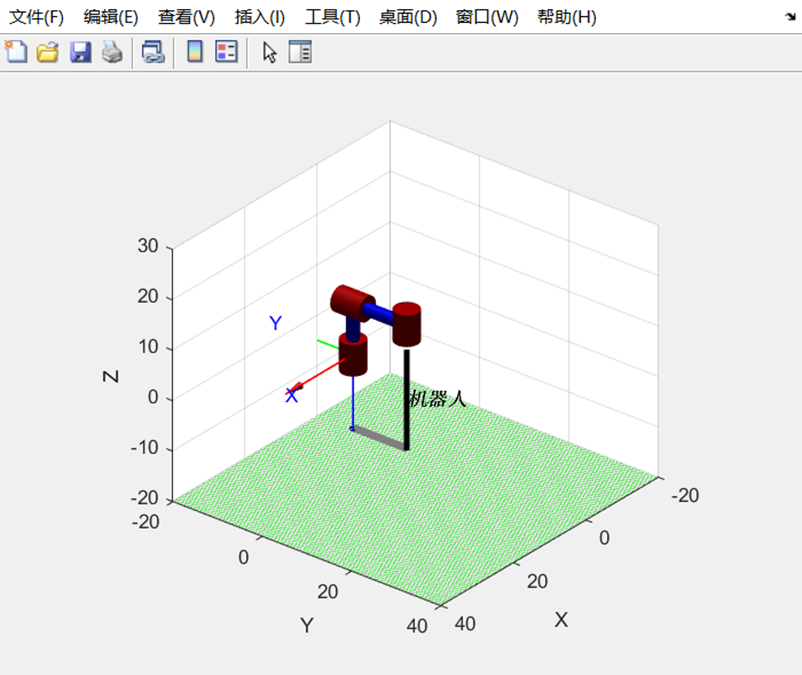
(3)L = Link(OPTIONS) 创建一个指定运动学、动力学参数的连杆建立四杆机器人 代码为
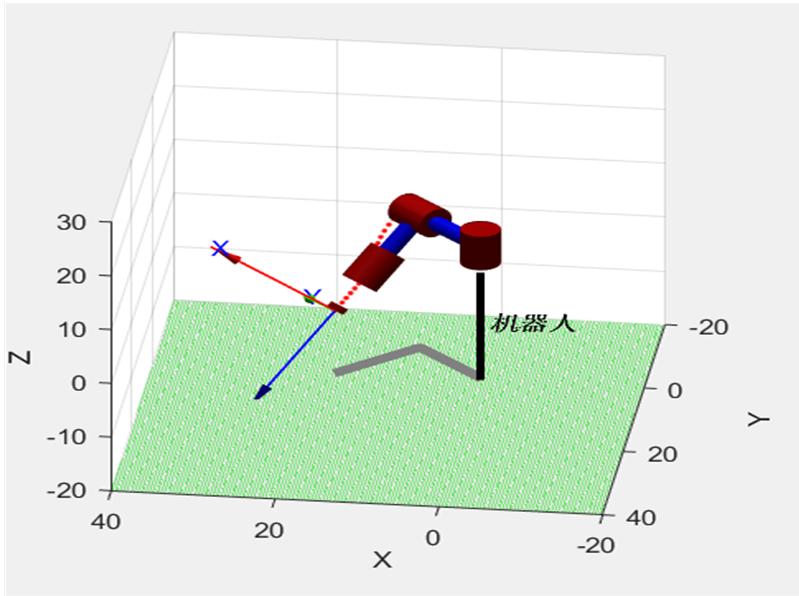
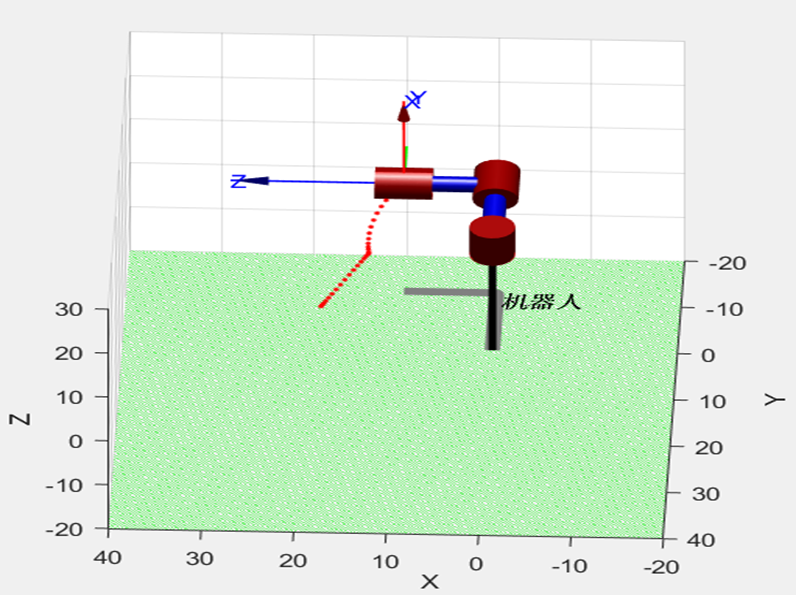
二、机器人轨迹规划
**轨迹:**机械臂的末端/操作点的位置,速度,加速度对时间的历程。
**轨迹规划:**已知起始点,终点,我们自己定义若干个中间点(via point),把这些点用平滑曲线连接起来。理想的轨迹都是物体运动的位置和速度都是连续的。
**轨迹规划的类型:**点对点、笛卡尔直线和曲线的轨迹规划。
**曲线拟合:**选择适当的曲线类型来拟合数据,并用拟合的曲线来分析变量间的关系。
最后
以上就是大方过客最近收集整理的关于matlab简单仿真机器人基于matlab简单仿真机器人前言一、机器人连杆二、机器人轨迹规划的全部内容,更多相关matlab简单仿真机器人基于matlab简单仿真机器人前言一、机器人连杆二、机器人轨迹规划内容请搜索靠谱客的其他文章。








发表评论 取消回复