在CANoe的Installer Additional Components看到有carmaker的包,正好公司有carmaker的license,就尝试了一下。
使用的是CANoe13.0和Carmaker8.0,CANoe13.0安装完VectorCANoeCarMakerAddOn_2.6.0.exe后不会有demo工程,找vector的工作人员要的。可能更高版本的CANoe会有demo。
安装VectorCANoeCarMakerAddOn_2.6.0.exe
装完成后,在如下路径可找到一个demo:(注:canoe13是没有这个demo的)
C:UsersPublicDocumentsVectorCANoeSample Configurations 13.0.168IO_HILCarMakerInterface
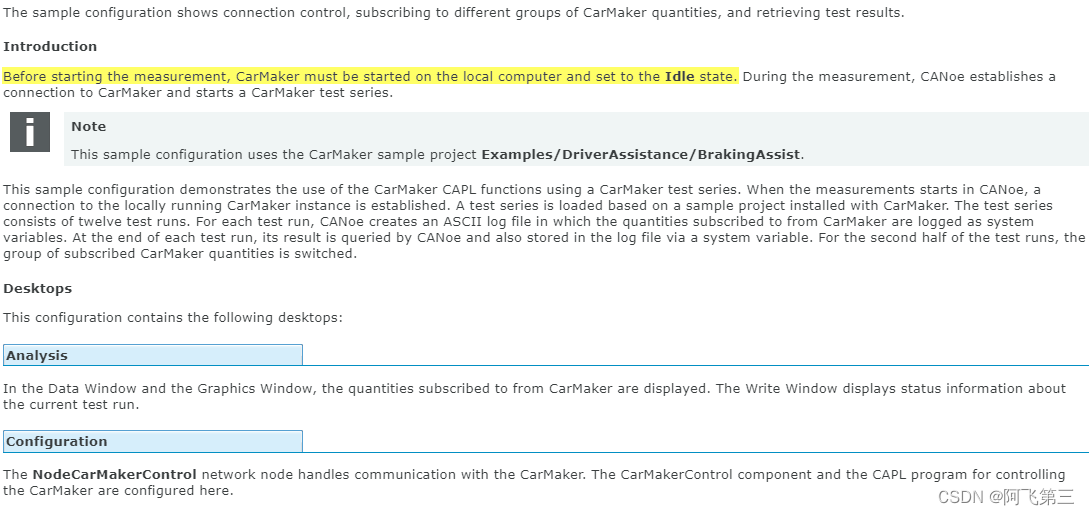
注:该demo需配合CarMaker中的demo"Examples/DriverAssistance/BrakingAssist "使用
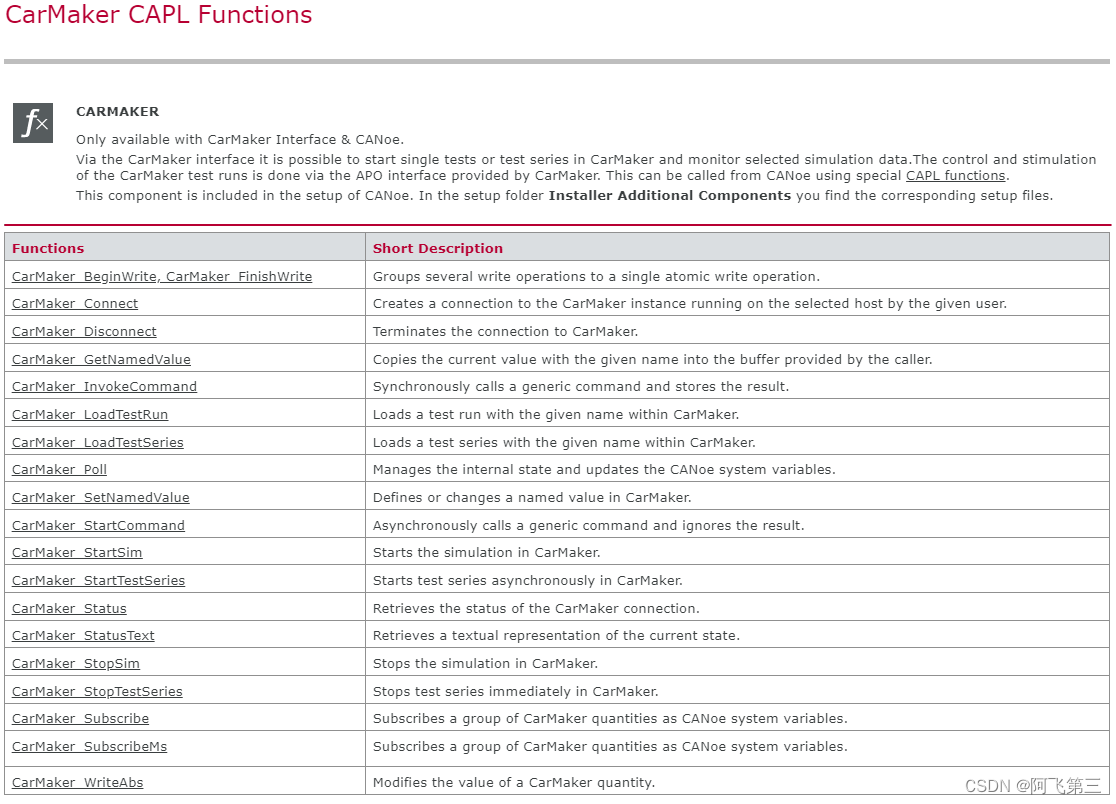
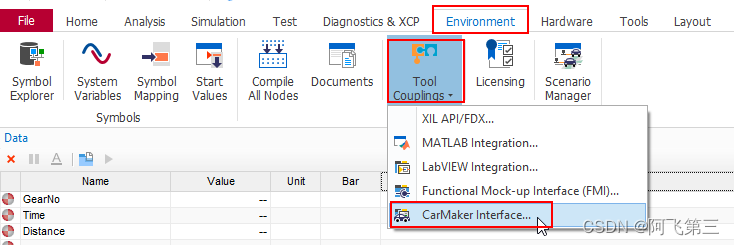
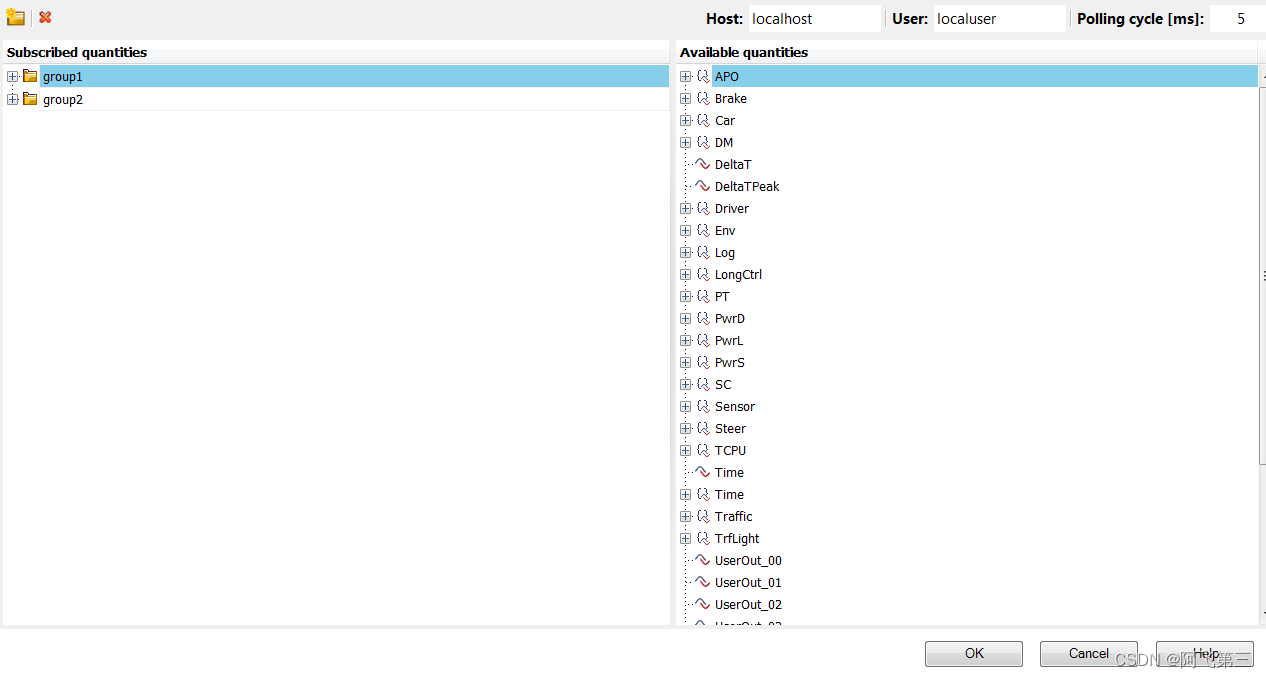
打开carmaker interface窗口
运行carmaker后可以看到如下变量说明连接成功。
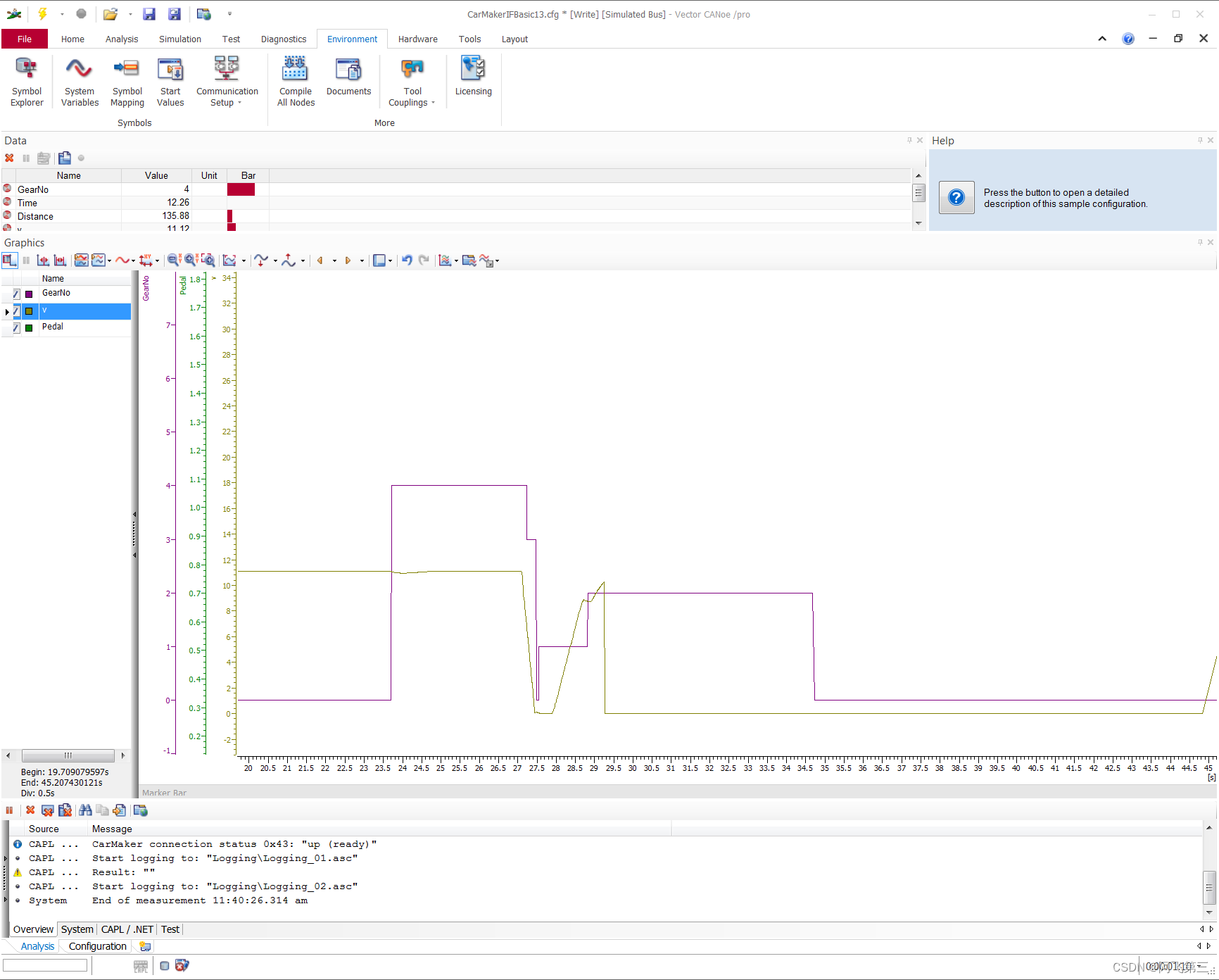
运行canoe,运行carmaker的testrun。可以看到车速等信息的变化。
这种方案用于纯摄像头的HIL测试应该是可行的,毫米波雷达需要对回波模拟器进行控制,需要在CAPL中开发相关功能。
最后
以上就是专一超短裙最近收集整理的关于CANoe+Carmaker联合仿真测试的全部内容,更多相关CANoe+Carmaker联合仿真测试内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复