一,STM32常见的定时器资源
1.系统嘀嗒定时器 SysTick
这是一个集成在Cortex M3内核 当中的定时器,它并不属于芯片厂商的外设,也就是说使用ARM内核的不同厂商,都拥有基本结构相同的系统定时器。主要目的是给RTOS提供时钟节拍 做时间基准。
2.看门狗定时器 WatchDog
3.实时时钟RTC
4.基本定时器:TIM6、TIM7
5. 通用定时器: TIM2、TIM3、TIM4、TIM5
在基本定时器的基础上,实现输出比较、输入捕获、PWM生成、单脉冲模式输出 等功能。这类定时器最具代表性,使用也最广泛。
6.高级定时器: TIM1、TIM8
二,STM32通用定时器的重要知识点
1.STM32的通用定时器是一个通过 可编程预分频器 (Prescaler)驱动的16位自动重装主计数器 (Counter Period) 构成。可以对内部时钟或触发源以及外部时钟或触发源进行计数。
2.通用定时器的基本工作原理:
首先,定时器时钟信号送入16位可编程预分配器(Prescaler),该预分配器系数为0~65535之间的任意数值。预分配器溢出后,会向16位的主计数器(Counter Period)发出一个脉冲信号。
预分频器,本质上是一个加法计数器 ,预分频系数实际上就是加计数的溢出值。
3.定时器发生中断时间的计算方法 :
定时时间= (Prescaler+1 ) X(Counter Period+1)X1/定时器时钟频率
三,STM32CubeMX中关于TIM的配置
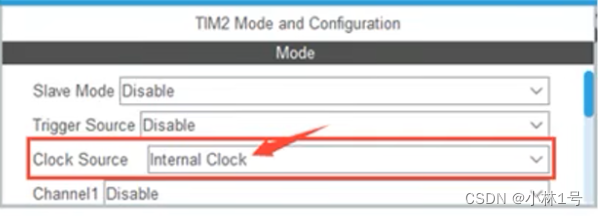
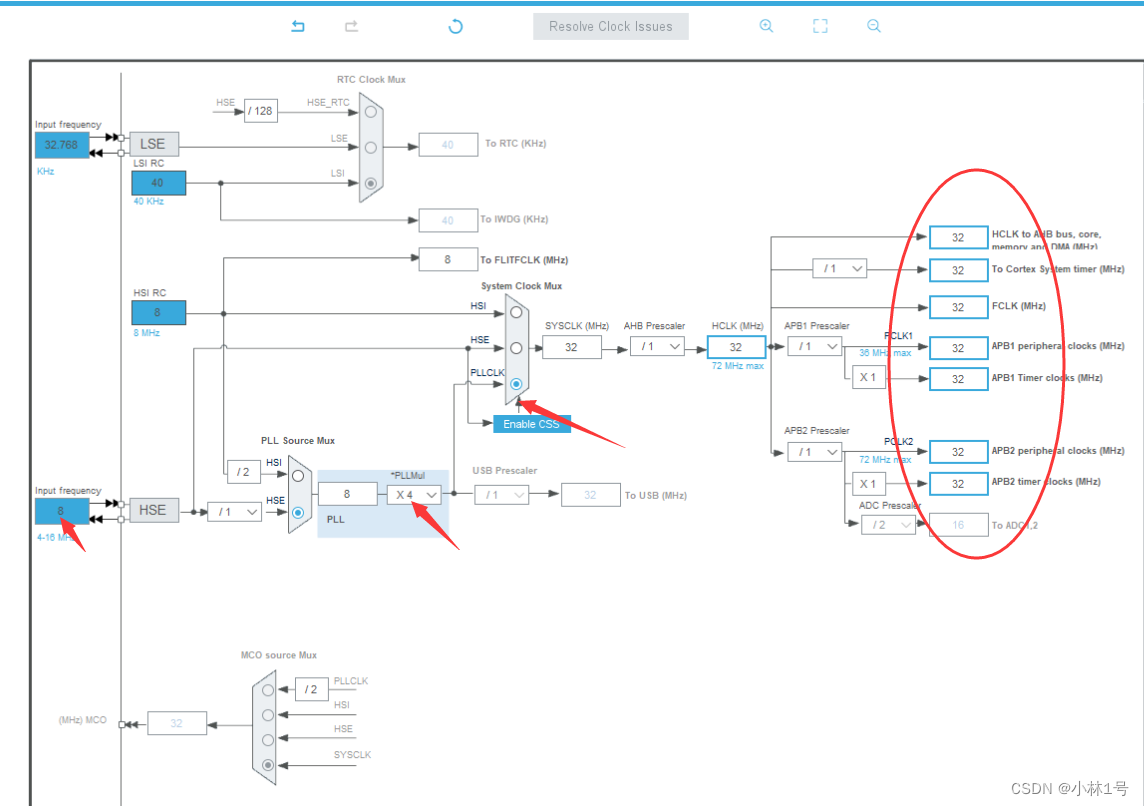
时钟信号32MHz,每隔500ms翻转一次PB9的输出电平。
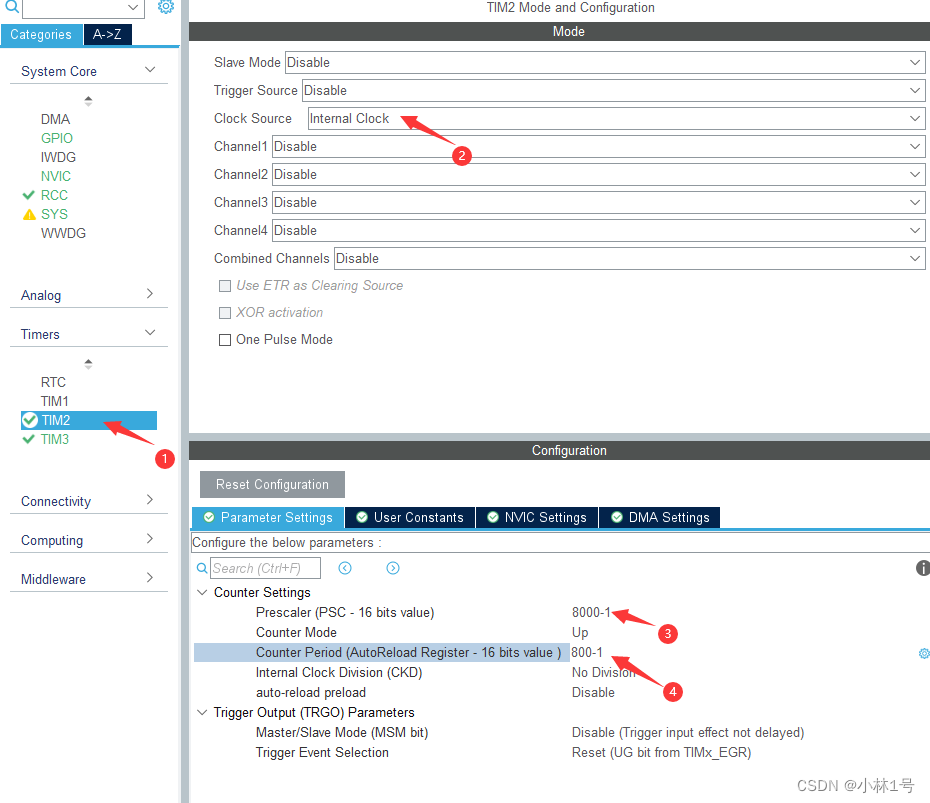
【1】设置Clock Source时钟源。
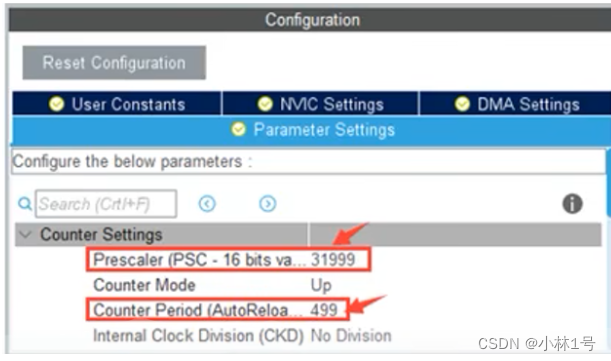
【2】设置Prescaler和Counter Period参数。
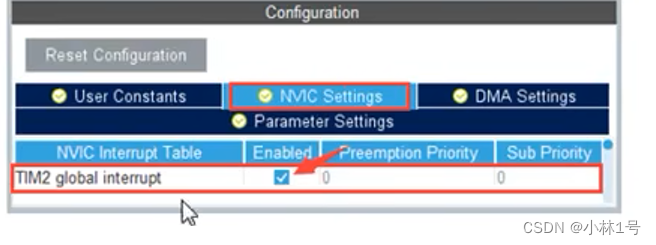
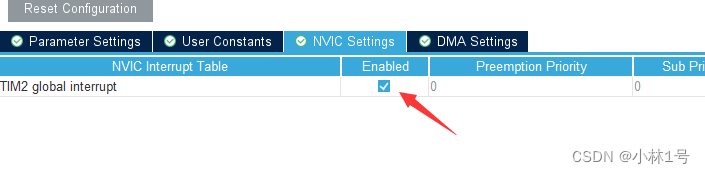
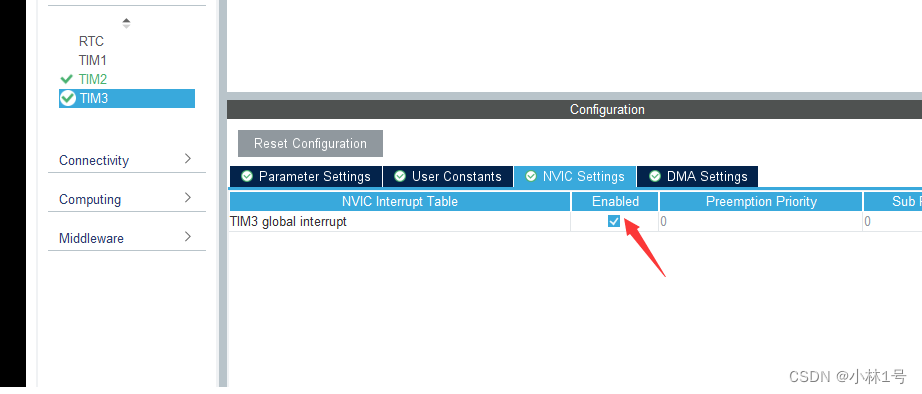
【3】设置NVIC嵌套向量中断控制器。
四,中断服务函数的编写
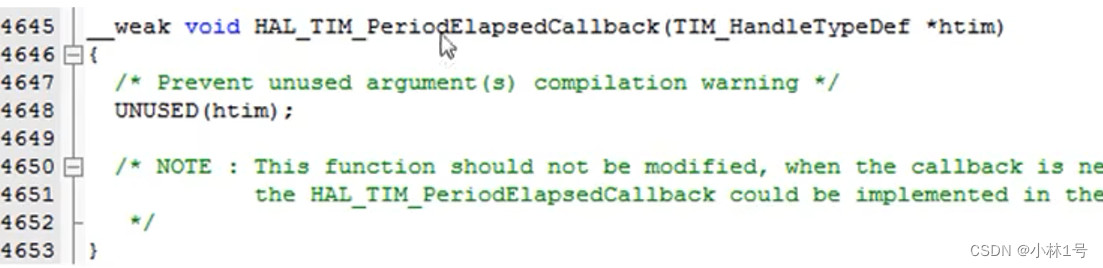
1.定时器溢出回调函数
2.用户重写定时器溢出回调函数,实现具体的中断逻辑处理
3.在main()中启动相应的定时器
五,实训:外部中断信号控制LED灯开关
[1]利用TIM2实现间隔定时,每隔0.2秒将LED1(PB3) 的开关状态翻转。
[2]利用TIM3实现间隔定时,每隔1秒将LED2(PB4) 的开关状态翻转。
[3]修改TIM2的初始化代码,改为每隔0.5秒将LED1的开关状态翻转。
1.在STM32CubeMX中做好前期准备
①新建工程,选择芯片
②配置基本参数(下图是配置TIM2时间间隔0.2s,要设时钟树为32MHZ才行)
LED1,LED2的相关设置不再赘述
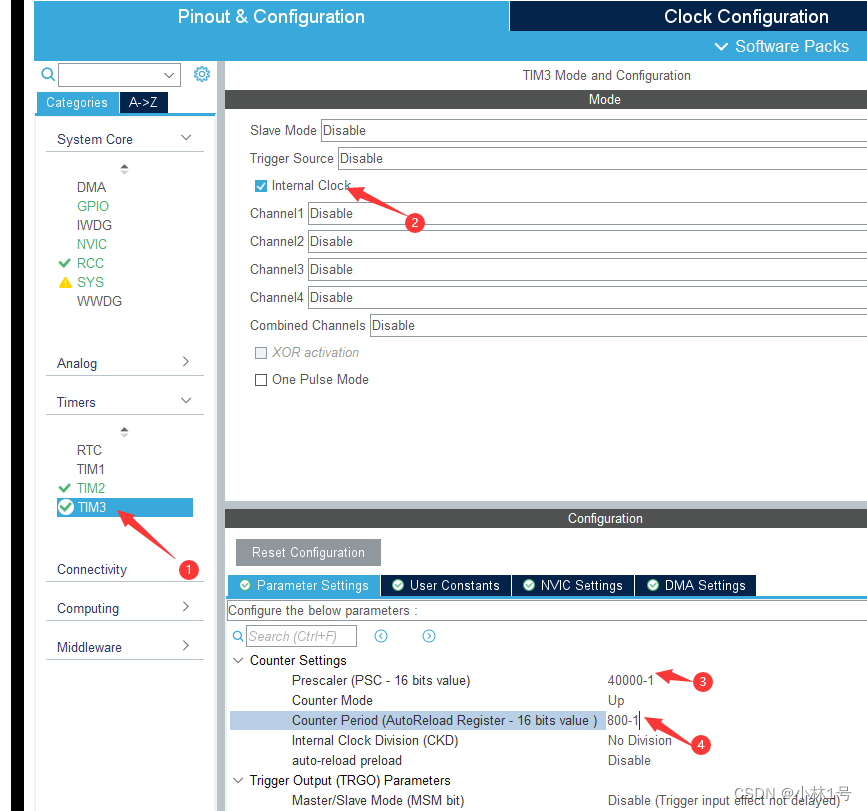
设置定时器3为间隔1s
③配置时钟树
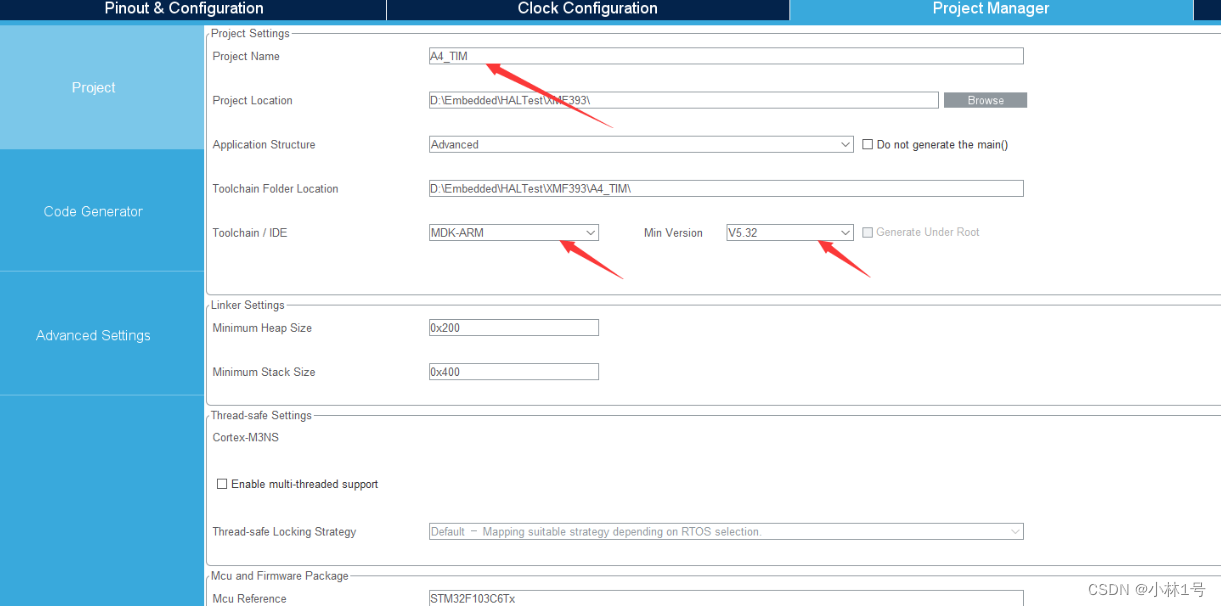
④设置工程相关
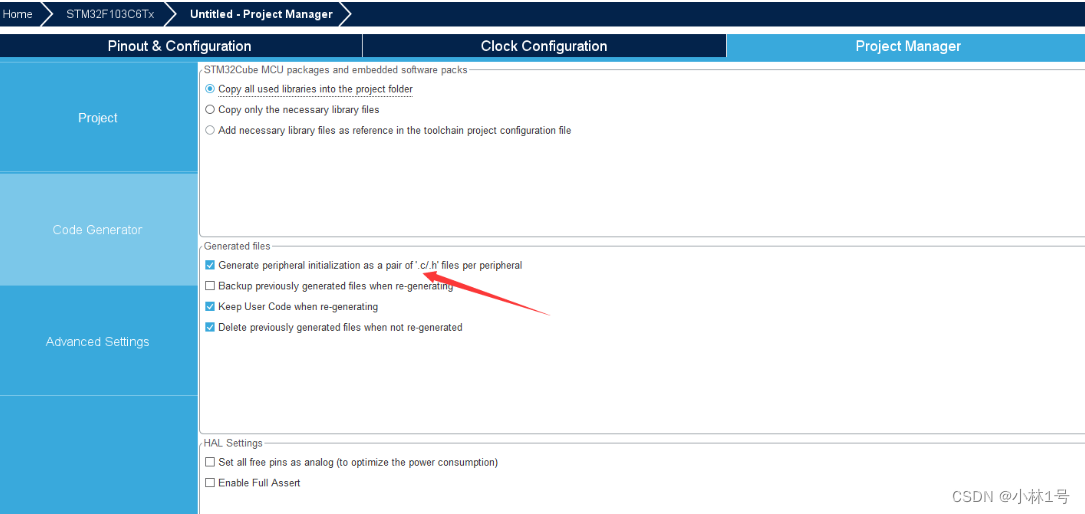
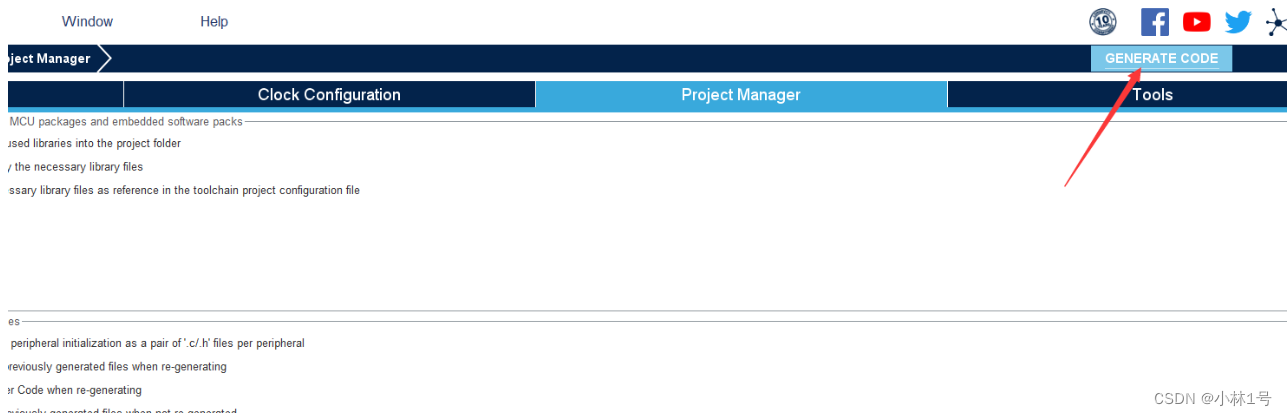
⑤生成代码
2.在MDK中编写相应代码
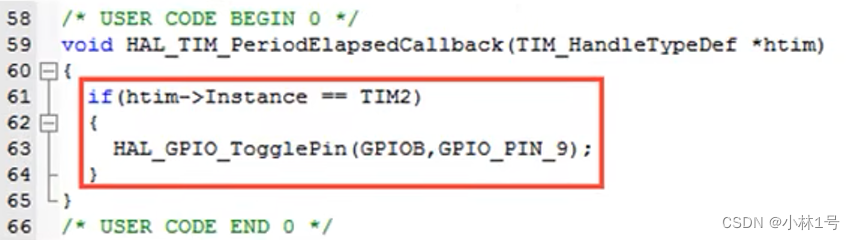
①找到并重写虚函数
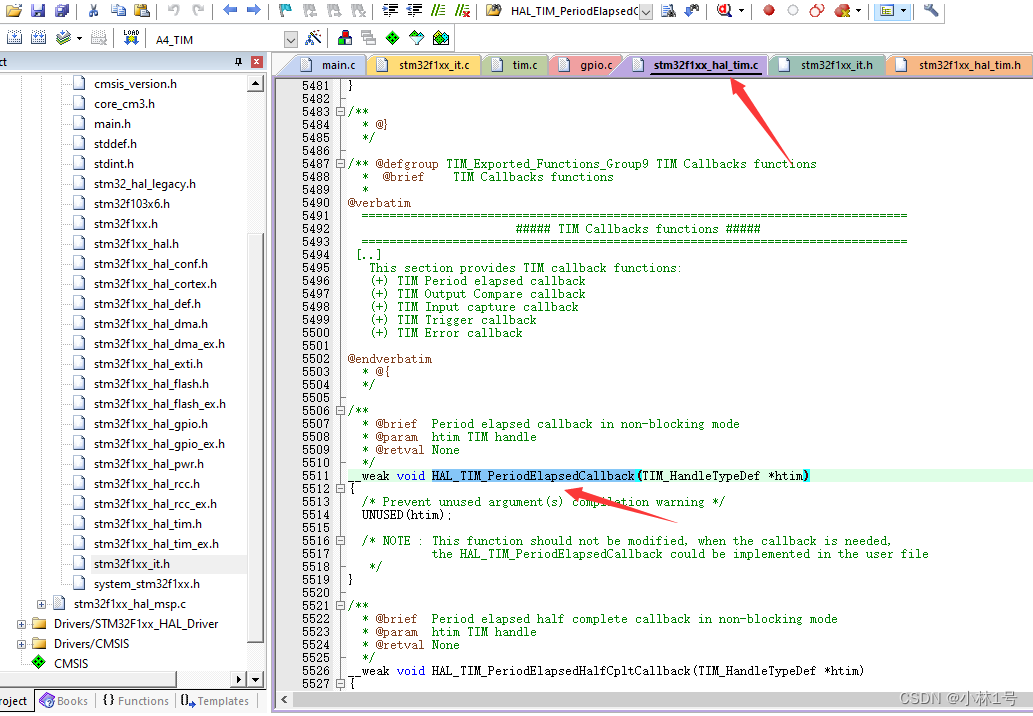
在main.c中重写虚函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM2)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_3);
}
if(htim->Instance == TIM3)
{
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_4);
}
}
②找到设置定时器启动函数
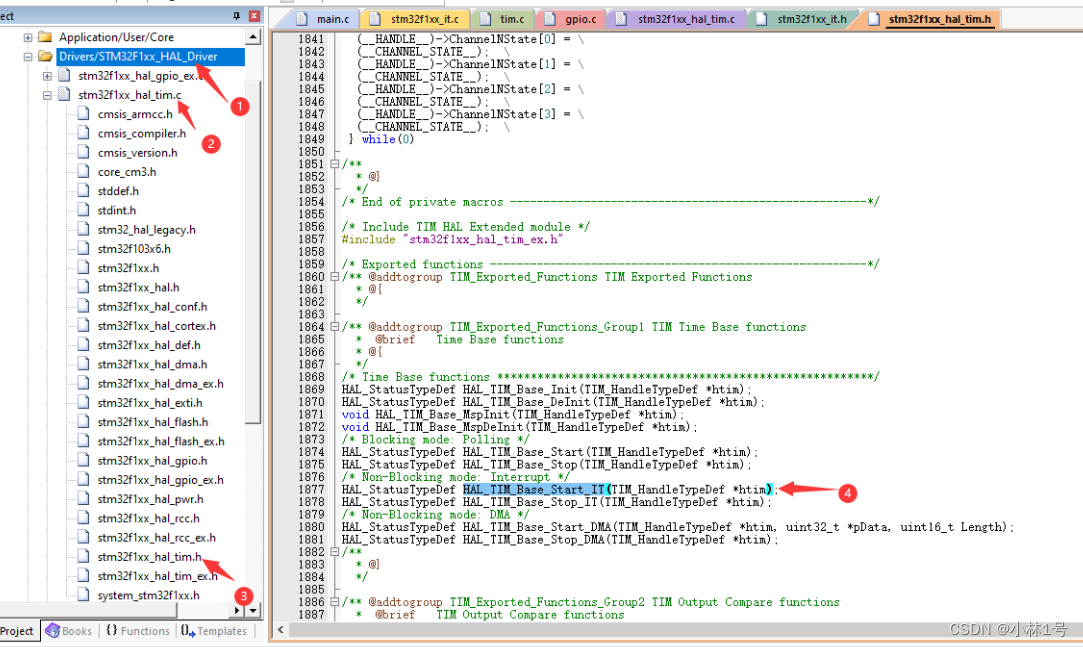
将其复制并在main.c文件中写如下代码,以实现定时器的启动
/* USER CODE BEGIN 2 */
HAL_TIM_Base_Start_IT(&htim2);
HAL_TIM_Base_Start_IT(&htim3);
/* USER CODE END 2 */
3.实现效果
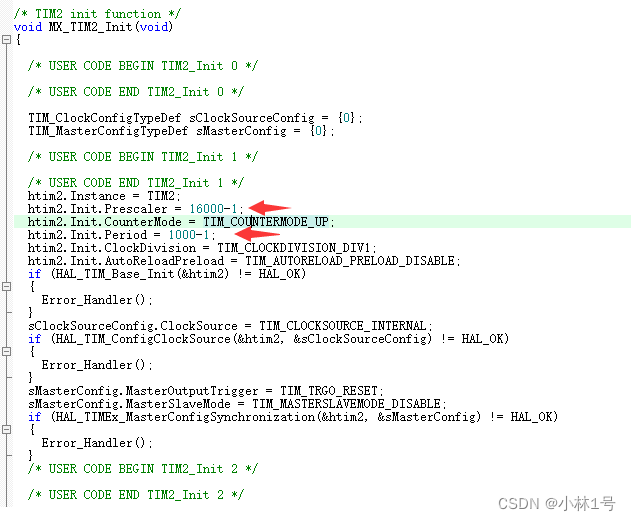
4.如何修改代码来实现TIM2每隔0.5秒将LED1的开关状态翻转
①在main.c中找到MX_TIM2_Init()并进入该函数
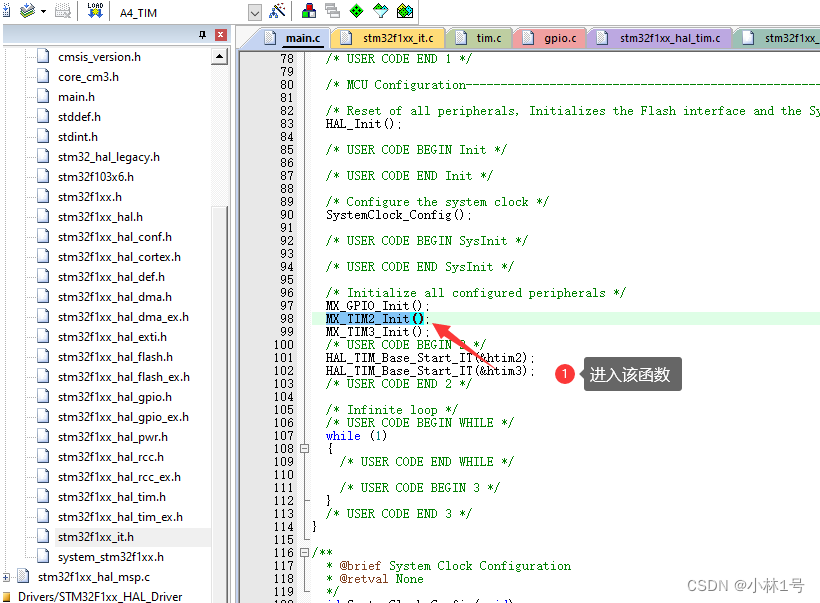
②修改下图所示处代码即可
最后
以上就是淡然白羊最近收集整理的关于P5 STM32的定时器开发基础的全部内容,更多相关P5内容请搜索靠谱客的其他文章。


![[发送AT指令配置a7670C模块上网]内核配置调试验证应用的编写AT的指令的使用](https://www.shuijiaxian.com/files_image/reation/bcimg3.png)





发表评论 取消回复