
简述四种干扰观测器(三):基于状态观测器的干扰观测器
专栏关注人数逐渐变多了,我也有点变懒了。。。不能这样,得改。
继续干扰观测器系列,这个系列将简述四种常用的干扰观测器的原理以及应用场景。
分别为:
1基于名义逆模型的干扰观测器;
2基于非线性观测器的干扰观测器;
3基于状态观测器的干扰观测器;
4基于扩张状态观测器的干扰观测器。
大家可以根据系统本身的特性来选择最适用的观测器。
如果可以构建状态观测器,其中的状态变量本身即包含干扰力,那么此状态观测器即可作为干扰观测器。
还是以直流电机为例:
直流电机的力矩方程如下:
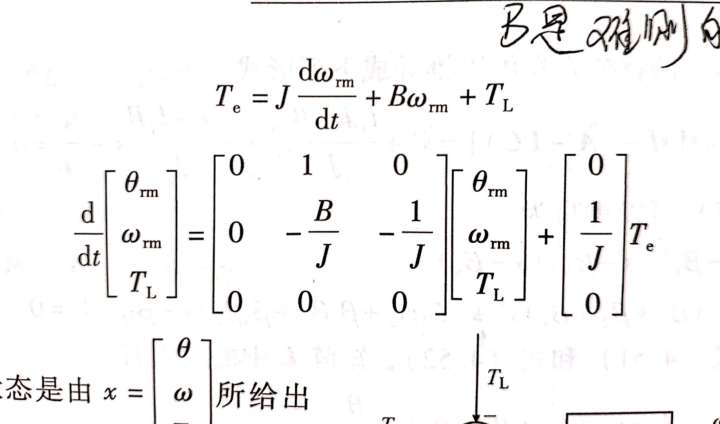
其中Te是电机的电磁转矩,Tl是负载转矩,B是粘滞摩擦系数,J是转动惯量。
利用如上状态方程构建如下观测器,其中的利用的是编码器的采样值来进行反馈。
可以看出,观测器的状态量包含转速估计值和负载转矩估计值,因此可将其分别估计出来。
只要转角变化较慢,即使B的值不准确,也可以准确地估计转速和负载转矩信息。详细推导过程见《电机传动系统控制》
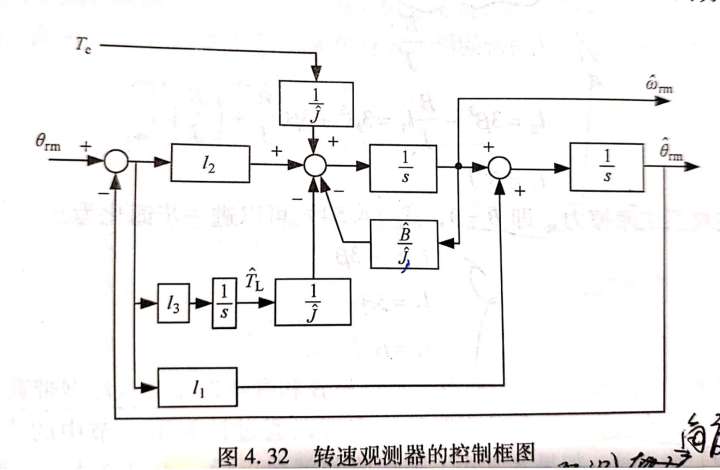
当观测器的带宽较高时 ,便可准确地估计出扰动转矩,控制框图如下:
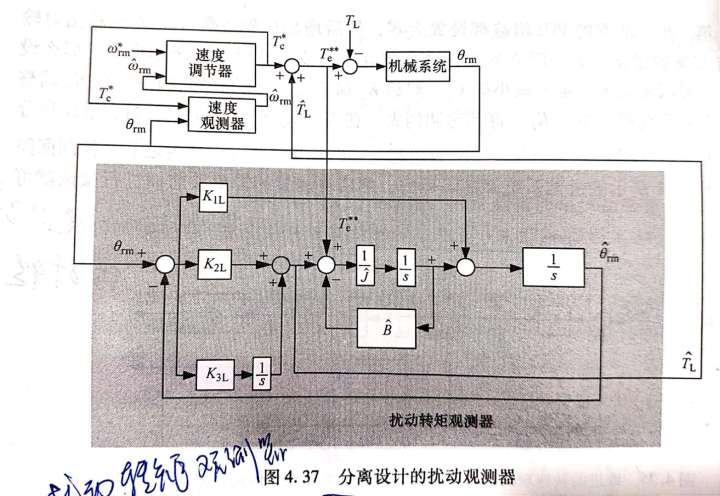
这里仅仅是粗略地给出如何利用转台观测器来设计扰动观测器,如果您要在实际应用中使用这种观测器,还要仔细地阅读《电机传动系统控制》,书中详细介绍了观测器额极点配置,性能分析,观测器的改进,速度与负载转矩观测器的分离设计。
总结:
1这种观测器可以观测转速和负载转矩。
2在转速较低的情况下转速观测器效果很好
3观测器的带宽要是控制器带宽的三倍以上才好。
4 转速或者带宽较高时,对模型参数的准确性更加依赖。
5 观测器带宽最好是控制器带宽的3-5倍。
FrancisZhao:简述四种干扰观测器(一):基于名义逆模型的干扰观测器zhuanlan.zhihu.com
欢迎指正讨论,转载请注明,认同请点赞。
为什么那么多人都是只收藏不点赞不评论啊!
麻烦大家给我一个反馈
最后
以上就是追寻短靴最近收集整理的关于四种触发器的特性方程_简述四种干扰观测器(三):基于状态观测器的干扰观测器...的全部内容,更多相关四种触发器内容请搜索靠谱客的其他文章。








发表评论 取消回复