线程管理之线程切换
- 前言
- 基本信息
- 前言说明
- CPU 架构移植
- rt_hw_interrupt_disable 关闭全局中断
- 知识点
- 中断屏蔽寄存器组
- 汇编指令B、BL、BX、BLX 和 BXJ
- 连接寄存器 R14( LR)
- rt_hw_interrupt_enable 打开全局中断
- 知识点
- MSR 指令
- *rt_hw_stack_init 线程栈的初始化
- 函数:rt_thread_init 代码内容
- 关键点说明:
- 函数:_rt_thread_init 代码内容
- 关键点:栈地址计算:
- 函数:*rt_hw_stack_init 代码内容
- 第一段代码分析:
- 第二段代码分析:
- 知识点
- RT_ASSERT(EX)
- ARM微处理器支持的四种类型堆栈工作方式
- 关于内存堆栈的理解
- 向下生长的满栈模型(满递减堆栈)
前言
基本信息
| 名称 | 描述说明 |
|---|---|
| RT-Thread Studio 软件版本 | 版本: 1.1.3 |
| RT-Thread 系统版本 | 4.0.2 |
| STM32CubeIDE 软件版本 | 1.4.0 |
| STM32芯片型号 | STM32F013VG |
前言说明
线程管理是RTOS系统的关键功能,在实时操作系统与分时操作系统中的差异非常大。这也是做RT-thread系统移植的基础,其中系统移植必须要实现的功能就是线程切换功能,RT-thread作为多线程系统,大部分应用开发的功能都集中在线程上运行,线程切换是线程管理的基础功能,这是一个重要的知识点。下面的全部内容是按照CPU架构移植相关的函数的顺序进行讲解的。
第二篇文章地址: STM32 RT-Thread 系统分析(3)-线程管理之线程切换(系统移植基础篇二).
CPU 架构移植
在嵌入式领域有多种不同 CPU 架构,例如 Cortex-M、ARM920T、MIPS32、RISC-V 等等。为了使 RT-Thread 能够在不同 CPU 架构的芯片上运行,RT-Thread 提供了一个 libcpu 抽象层来适配不同的 CPU 架构。libcpu 层向上对内核提供统一的接口,包括全局中断的开关,线程栈的初始化,上下文切换等。
RT-Thread 的 libcpu 抽象层向下提供了一套统一的 CPU 架构移植接口,这部分接口包含了全局中断开关函数、线程上下文切换函数、时钟节拍的配置和中断函数、Cache 等等内容。下表是 CPU 架构移植需要实现的接口和变量。
| 函数和变量 | 描述 |
|---|---|
| rt_base_t rt_hw_interrupt_disable(void); | 关闭全局中断 |
| void rt_hw_interrupt_enable(rt_base_t level); | 打开全局中断 |
| rt_uint8_t *rt_hw_stack_init(void *tentry, void *parameter, rt_uint8_t *stack_addr, void *texit); | 线程栈的初始化,内核在线程创建和线程初始化里面会调用这个函数 |
| void rt_hw_context_switch_to(rt_uint32 to); | 没有来源线程的上下文切换,在调度器启动第一个线程的时候调用,以及在 signal 里面会调用 |
| void rt_hw_context_switch(rt_uint32 from, rt_uint32 to); | 从 from 线程切换到 to 线程,用于线程和线程之间的切换 |
| void rt_hw_context_switch_interrupt(rt_uint32 from, rt_uint32 to); | 从 from 线程切换到 to 线程,用于中断里面进行切换的时候使用 |
| rt_uint32_t rt_thread_switch_interrupt_flag; | 表示需要在中断里进行切换的标志 |
| rt_uint32_t rt_interrupt_from_thread, rt_interrupt_to_thread; | 在线程进行上下文切换时候,用来保存 from 和 to 线程 |
上面是libcpu 移植相关 API,下面我们根据各个函数实际的代码一步一步进行分析和理解
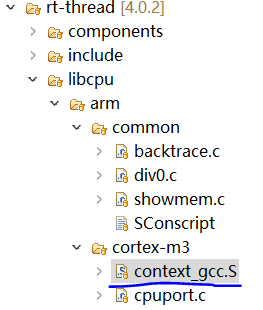
新建一个工程后可以看到,代码位置和名称如下面截图所示 context_gcc.s,这部分代码就是与CPU移植相关的部分代码:
rt_hw_interrupt_disable 关闭全局中断
代码原文:
/*
* rt_base_t rt_hw_interrupt_disable();关闭全局中断
*/
.global rt_hw_interrupt_disable /*声明一个全局可调用变量*/
.type rt_hw_interrupt_disable, %function
/*将 rt_hw_interrupt_disable 设置为函数类型*/
rt_hw_interrupt_disable:
MRS
R0, PRIMASK /*读取中断屏蔽寄存器的值到函数返回值寄存器,用于保存当前没关闭中断前的中断屏蔽寄存器状态*/
CPSID
I
/*CPSID I ;PRIMASK=1, ;关中断*/
BX
LR
/*函数返回*/
知识点
中断屏蔽寄存器组
中断屏蔽寄存器组:PRIMASK, FAULTMASK 和 BASEPRI这三个寄存器用于控制异常的使能和除能。
| 名字 | 功能描述 |
|---|---|
| PRIMASK | 这是个只有 1 个位的寄存器。当它置 1 时, 就关掉所有可屏蔽的异常,只剩下 NMI和硬 fault 可以响应。它的缺省值是 0,表示没有关中断。 |
| FAULTMASK | 这是个只有 1 个位的寄存器。当它置 1 时,只有 NMI 才能响应,所有其它的异常,包括中断和 fault,通通闭嘴。它的缺省值也是 0,表示没有关异常。 |
| BASEPRI | 这个寄存器最多有 9 位(由表达优先级的位数决定)。它定义了被屏蔽优先级的阈值。当它被设成某个值后,所有优先级号大于等于此值的中断都被关(优先级号越大,优先级越低)。但若被设成 0,则不关闭任何中断, 0 也是缺省值。 |
CPSID指令 :除能 PRIMASK(CPSID i)/ FAULTMASK(CPSID f)——置位相应的位
汇编指令B、BL、BX、BLX 和 BXJ
语法
op1{cond}{.W} <wbr />label
op2{cond} <wbr />Rm
| 指令 | 说明 |
|---|---|
| B | 跳转。 |
| BL | 带链接跳转 |
| BLX | 带链接跳转并切换指令集。 |
| BX | 跳转并切换指令集。 |
| BLX | 带链接跳转并切换指令集。 |
| BXJ | 跳转并转换为 Jazelle 执行。 |
| cond | 是一个可选的条件代码。 cond 不能用于此指令的所有形式。 |
| .W | 是一个可选的指令宽度说明符,用于强制要求在 Thumb-2 中使用 32 位 B 指令。 |
| label | 是一个程序相对的表达式。 |
| Rm | 是一个寄存器,包含要跳转到的目标地址。 |
所有这些指令均会引发跳转,或跳转到 label,或跳转到包含在 Rm 中的地址处。 此外:
- BL 和 BLX 指令可将下一个指令的地址复制到 lr(r14,链接寄存器)中。
- BX 和 BLX 指令可将处理器的状态从 ARM 更改为 Thumb,或从 Thumb 更改为 ARM
- BLX label 无论何种情况,始终会更改处理器的状态。
- BX Rm 和 BLX Rm 可从 Rm 的位 [0] 推算出目标状态:
如果 Rm 的位 [0] 为 0,则处理器的状态会更改为(或保持在)ARM 状态
如果 Rm 的位 [0] 为 1,则处理器的状态会更改为(或保持在)Thumb 状态。
BXJ 指令会将处理器的状态更改为 Jazelle
连接寄存器 R14( LR)
R14 是连接寄存器( LR)。在一个汇编程序中,你可以把它写作 both LR 和 R14。 LR 用于在调用子程序时存储返回地址。例如,当你在使用 BL(分支并连接, Branch and Link)指令时,就自动填充 LR 的值。
main ;主程序
…
BL function1 ; 使用“分支并连接”指令呼叫 function1
; PC= function1,并且 LR=main 的下一条指令地址
…
Function1
… ; function1 的代码
BX LR ; 函数返回(如果 function1 要使用 LR,必须在使用前 PUSH,
; 否则返回时程序就可能跑飞了)
尽管 PC 的 LSB 总是 0(因为代码至少是字对齐的), LR 的 LSB 却是可读可写的。这是历史遗留的产物。在以前,由位 0 来指示 ARM/Thumb 状态。因为其它有些 ARM 处理器支持ARM 和 Thumb 状态并存,为了方便汇编程序移植, CM3 需要允许 LSB 可读可写。
rt_hw_interrupt_enable 打开全局中断
代码原文:
/*
* void rt_hw_interrupt_enable(rt_base_t level);打开全局中断
*/
.global rt_hw_interrupt_enable /*声明一个全局可调用变量*/
.type rt_hw_interrupt_enable, %function /*将 rt_hw_interrupt_enable 设置为函数类型*/
rt_hw_interrupt_enable:
MSR
PRIMASK, R0
/*读取r0寄存器的值复制给PRIMASK*/
BX
LR
/*函数返回*/
知识点
MSR 指令
特殊功能寄存器组
Cortex‐M3 中的特殊功能寄存器包括:
- 程序状态寄存器组( PSRs 或曰 xPSR)
- 中断屏蔽寄存器组( PRIMASK, FAULTMASK,以及 BASEPRI)
- 控制寄存器( CONTROL)
它们只能被专用的 MSR 和 MRS 指令访问,而且它们也没有存储器地址。
MRS <gp_reg>, <special_reg> ;读特殊功能寄存器的值到通用寄存器
MSR <special_reg>, <gp_reg> ;写通用寄存器的值到特殊功能寄存器
*rt_hw_stack_init 线程栈的初始化
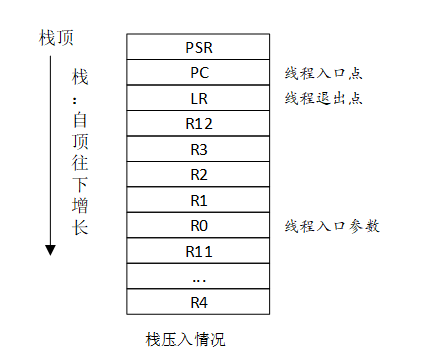
在动态创建线程和初始化线程的时候,会使用到内部的线程初始化函数_rt_thread_init(),_rt_thread_init() 函数会调用栈初始化函数 rt_hw_stack_init(),在栈初始化函数里会手动构造一个上下文内容,这个上下文内容将被作为每个线程第一次执行的初始值。上下文在栈里的排布如下图所示:
根据函数嵌套的顺序:rt_thread_init → _rt_thread_init→*rt_hw_stack_init
函数:rt_thread_init 代码内容
rt_err_t rt_thread_init(struct rt_thread *thread,
const char
*name,
void (*entry)(void *parameter),
void
*parameter,
void
*stack_start,
rt_uint32_t
stack_size,
rt_uint8_t
priority,
rt_uint32_t
tick)
{
/* thread check */
RT_ASSERT(thread != RT_NULL); //检查(thread != RT_NULL) 是否为假如果是假的就报错
RT_ASSERT(stack_start != RT_NULL);//检查(stack_start != RT_NULL) 是否为假如果是假的就报错
/* initialize thread object 按照线程类型初始化线程函数对象*/
rt_object_init((rt_object_t)thread, RT_Object_Class_Thread, name);
return _rt_thread_init(thread,
name,
entry,
parameter,
stack_start,
stack_size,
priority,
tick);
}
可以看到 rt_thread_init函数的输入参数是直接传递到_rt_thread_init函数中。
静态线程的线程句柄(或者说线程控制块指针)、线程栈由用户提供。静态线程是指线程控制块、线程运行栈一般都设置为全局变量,在编译时就被确定、被分配处理,内核不负责动态分配内存空间。需要注意的是,用户提供的栈首地址需做系统对齐(例如 ARM 上需要做 4 字节对齐)。
示例:
ALIGN(RT_ALIGN_SIZE)
static char thread2_stack[1024];
static struct rt_thread thread2;
/* 线程 2 入口 */
static void thread2_entry(void *param)
{
}
/* 初始化线程 2,名称是 thread2,入口是 thread2_entry */
rt_thread_init(&thread2,
"thread2",
thread2_entry,
RT_NULL,
&thread2_stack[0],
sizeof(thread2_stack),
THREAD_PRIORITY - 1, THREAD_TIMESLICE);
rt_thread_startup(&thread2);
关键点说明:
void (*entry)(void *parameter)
*entry 是函数指针,
*parameter是参数列表指针,根据 ARM APCS 调用标准,将第一个参数保存在 r0 寄存器
线程初始化接口 rt_thread_init() 的参数和返回值见下表:
| 参数 | 描述 |
|---|---|
| thread | 线程句柄。线程句柄由用户提供出来,并指向对应的线程控制块内存地址 |
| name | 线程的名称;线程名称的最大长度由 rtconfig.h 中定义的 RT_NAME_MAX 宏指定,多余部分会被自动截掉 |
| entry | 线程入口函数 |
| parameter | 线程入口函数参数 |
| stack_start | 线程栈起始地址 |
| stack_size | 线程栈大小,单位是字节。在大多数系统中需要做栈空间地址对齐(例如 ARM 体系结构中需要向 4 字节地址对齐) |
| priority | 线程的优先级。优先级范围根据系统配置情况(rtconfig.h 中的 RT_THREAD_PRIORITY_MAX 宏定义),如果支持的是 256 级优先级,那么范围是从 0 ~ 255,数值越小优先级越高,0 代表最高优先级 |
| tick | 线程的时间片大小。时间片(tick)的单位是操作系统的时钟节拍。当系统中存在相同优先级线程时,这个参数指定线程一次调度能够运行的最大时间长度。这个时间片运行结束时,调度器自动选择下一个就绪态的同优先级线程进行运行 |
| 返回 | —— |
| RT_EOK | 线程创建成功 |
| -RT_ERROR | 线程创建失败 |
函数:_rt_thread_init 代码内容
static rt_err_t _rt_thread_init(struct rt_thread *thread,
const char
*name,
void (*entry)(void *parameter),
void
*parameter,
void
*stack_start,
rt_uint32_t
stack_size,
rt_uint8_t
priority,
rt_uint32_t
tick)
{
/* init thread list */
rt_list_init(&(thread->tlist));
thread->entry = (void *)entry;
thread->parameter = parameter;
/* stack init */
thread->stack_addr = stack_start;
thread->stack_size = stack_size;
/* init thread stack 初始化线程栈*/
rt_memset(thread->stack_addr, '#', thread->stack_size);
#ifdef ARCH_CPU_STACK_GROWS_UPWARD //栈地址由低向高增长
thread->sp = (void *)rt_hw_stack_init(thread->entry, thread->parameter,
(void *)((char *)thread->stack_addr),
(void *)rt_thread_exit);
#else
thread->sp = (void *)rt_hw_stack_init(thread->entry, thread->parameter,
(rt_uint8_t *)((char *)thread->stack_addr + thread->stack_size - sizeof(rt_ubase_t)),
(void *)rt_thread_exit);
/*********后面的省略暂不分析**********/
可以看到这个宏ARCH_CPU_STACK_GROWS_UPWARD 为栈地址由低向高增长的意思,而context-M3正好与之相反,由高向低生长。具体可以查看下面的知识点:向下生长的满栈模型。
*rt_hw_stack_init函数是用来获取当前线程的栈顶指针地址的。
关键点:
_rt_thread_init函数 给*rt_hw_stack_init 函数 输入的参数为
| 参数 | 说明 |
|---|---|
| thread->entry | 由thread->entry = (void *)entry;这个代码可以看出输入的是指向线程运行函数的起始地址的指针 |
| thread->parameter | 由thread->parameter = parameter;可以看出,这是个输入线程函数的参数列表指针 |
| (rt_uint8_t *)((char *)thread->stack_addr + thread->stack_size - sizeof(rt_ubase_t)) | 这个是线程栈的栈顶地址值。栈指针SP指向最后一个被压入栈的32位数值 。因此栈顶地址值为:(char *)thread->stack_addr(栈起始地址) + thread->stack_size(栈占用空间大小) -sizeof(rt_ubase_t)(4个字节占用空间大小) , |
| rt_thread_exit | 执行 rt_thread_exit() 函数,先将该线程从系统就绪队列中删除,再将该线程的状态更改为关闭状态,不再参与系统调度,然后挂入 rt_thread_defunct 僵尸队列(资源未回收、处于关闭状态的线程队列)中,最后空闲线程会回收被删除线程的资源。(所有线程均使用同一个 rt_thread_exit() 函数) |
关键点:栈地址计算:
在这个函数最关键和难理解的就是栈顶地址计算和传递。举例来说,声明一个线程的栈为
static rt_uint8_t timer_thread_stack[512];//示例
/* start software timer thread */
rt_thread_init(&timer_thread,
"timer",
rt_thread_timer_entry,
RT_NULL,
&timer_thread_stack[0],
sizeof(timer_thread_stack),
RT_TIMER_THREAD_PRIO,
10);
因此timer_thread线程的传递的 **&timer_thread_stack[0]**地址值为:0x20000d48(32位地址值),传递到_rt_thread_init 函数仍旧为void *指针类型传递。
注意: 传递给*rt_hw_stack_init 函数 之前对stack_start指向的地址的值取了出来进行了计算,并强制转换为rt_uint8_t *指针类型(原来是void *类型)。此时,在*rt_hw_stack_init 函数 中,stack_addr输入参数的指向地址值由原来的0x20000d48变为:0x20000f44=0x20000d48(十六进制)+512(十进制)-4(十进制)。
- sizeof(rt_ubase_t) 中的rt_ubase_t表示typedef unsigned long 在ARM中是32位占用4字节。
- 传递到*rt_hw_stack_init 函数之前对栈地址进行地址值计算和指针类型转换。
- 强制转换为rt_uint8_t *指针类型的原因是因为timer_thread_stack数组的数据类型为rt_uint8_t类型 。后续的指针地址值的加减操作,均是表示指向timer_thread_stack数组中元素的指针的地址值的操作,改变了指针指向的地址值,就相当于指针指向timer_thread_stack数组中的元素位置变了。例如指针原来的地址值:0x20000d48(此时指向数组最后一个元素),将其值减去64变为0x20000d08(此时指向数组倒数第64个元素),因为指针类型是rt_uint8_t类型,减去64则相当于向后走了64个字节。
函数:*rt_hw_stack_init 代码内容
下代码是栈初始化的代码:
在栈里构建上下文
rt_uint8_t *rt_hw_stack_init(void
*tentry,
void
*parameter,
rt_uint8_t *stack_addr,
void
*texit)
{
struct stack_frame *stack_frame;
rt_uint8_t
*stk;
unsigned long
i;
/* 对传入的栈指针做对齐处理 ,堆栈指针的最低两位永远是 0,这意味着堆栈总是 4 字节对齐的*/
stk
= stack_addr + sizeof(rt_uint32_t);
stk
= (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);
stk -= sizeof(struct stack_frame);
/* 得到上下文的栈帧的指针 */
stack_frame = (struct stack_frame *)stk;
/* init all register 把所有寄存器的默认值设置为 0xdeadbeef*/
for (i = 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)
{
((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;
}
/* 根据 ARM
APCS 调用标准,将第一个参数保存在 r0 寄存器 */
stack_frame->exception_stack_frame.r0
= (unsigned long)parameter; /* r0 : argument */
/* 将剩下的参数寄存器都设置为 0 */
stack_frame->exception_stack_frame.r1
= 0;
/* r1 */
stack_frame->exception_stack_frame.r2
= 0;
/* r2 */
stack_frame->exception_stack_frame.r3
= 0;
/* r3 */
/* 将 IP(Intra-Procedure-call scratch register.) 设置为 0 */
stack_frame->exception_stack_frame.r12 = 0;
/* r12 */
/* 将线程退出函数的地址保存在 lr 寄存器 */
stack_frame->exception_stack_frame.lr
= (unsigned long)texit;
/* lr */
/* 将线程入口函数的地址保存在 pc 寄存器 */
stack_frame->exception_stack_frame.pc
= (unsigned long)tentry;
/* entry point, pc */
/* 设置 psr 的值为 0x01000000L,表示默认切换过去是 Thumb 模式 */
stack_frame->exception_stack_frame.psr = 0x01000000L;
/* PSR */
/* return task's current stack address
返回当前线程的栈地址
*/
return stk;
}
| *rt_hw_stack_init 输入参数 | 说明 |
|---|---|
| void *tentry | 函数执行起始地址 |
| void *parameter | 线程入口函数参数 |
| rt_uint8_t *stack_addr | 栈地址 |
| void *texit | (void *)rt_thread_exit任务的执行函数使用任务栈,任务栈动态增减。当执行函数返回,任务栈弹栈,作为 lr 的 rt_thread_exit 的地址恢复到 PC 中,程序继续执行此函数,完成任务的正常退出。 |
第一段代码分析:
struct stack_frame *stack_frame;
rt_uint8_t
*stk;
unsigned long
i;
/* 对传入的栈指针做对齐处理 ,堆栈指针的最低两位永远是 0,这意味着堆栈总是 4 字节对齐的 */
stk
= stack_addr + sizeof(rt_uint32_t);
stk
= (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);
stk -= sizeof(struct stack_frame);
分析:
指针stk最终会返回,赋值给thread->sp指针。指针stk的数据类型为rt_uint8_t 因此计算均为1个字节的偏差进行计算。
- stk = stack_addr + sizeof(rt_uint32_t); 表示:stk指向地址值=输入的栈地址值+4个字节。
- stk = (rt_uint8_t *)RT_ALIGN_DOWN((rt_uint32_t)stk, 8);表示:stk指向地址值按照8字节对齐
- stk -= sizeof(struct stack_frame);表示:stk指向地址值向低地址偏移64个字节(sizeof(struct stack_frame)=64)。偏移出的空间用于stack_frame结构体内容的存放。
下面是stack_frame的代码:
struct exception_stack_frame
{
rt_uint32_t r0;
rt_uint32_t r1;
rt_uint32_t r2;
rt_uint32_t r3;
rt_uint32_t r12;
rt_uint32_t lr;
rt_uint32_t pc;
rt_uint32_t psr;
};
struct stack_frame
{
/* r4 ~ r11 register */
rt_uint32_t r4;
rt_uint32_t r5;
rt_uint32_t r6;
rt_uint32_t r7;
rt_uint32_t r8;
rt_uint32_t r9;
rt_uint32_t r10;
rt_uint32_t r11;
struct exception_stack_frame exception_stack_frame;
};
第二段代码分析:
/* 得到上下文的栈帧的指针 */
stack_frame = (struct stack_frame *)stk;
/* init all register 把所有寄存器的默认值设置为 0xdeadbeef*/
for (i = 0; i < sizeof(struct stack_frame) / sizeof(rt_uint32_t); i ++)
{
((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;
}
分析:
- stack_frame = (struct stack_frame *)stk;表示:将stk指针类型由原来的rt_uint8_t类型 强制转换为 struct stack_frame类型。转换后stack_frame 结构体内的各种元素与stk指针指向的栈数组元素一一对应,操作stack_frame 结构体的元素就是对栈数组元素的操作。
- ((rt_uint32_t *)stack_frame)[i] = 0xdeadbeef;表示:这是一个遍历的for循环,是对stack_frame指针对应的地址值对应的数组元素操作操作的数据类型为rt_uint32_t类型。当i=0时,偏移的地址值为0 ,当i=1时,偏移的地址值为1个rt_uint32_t类值的大小为4个字节。遍历范围i的值从0到16不包括16(sizeof(struct stack_frame) =64除以 sizeof(rt_uint32_t)=4)。
后续的对stack_frame的结构体操作均是将对应数值存入线程栈数组
注意:
- 静态线程栈数组是全局变量,是用于存放线程的出栈和入栈的数据的,它的一开始编译就确定了在内存中的位置的。
- 动态线程栈数组是用内存申请的方式来获取空间的,它与静态线程不同的是的内存位置属于堆,动态线程的内存地址生长方向是向上生长的。具体请看下面关于堆栈理解的知识点。
知识点
RT_ASSERT(EX)
#define RT_ASSERT(EX)
if (!(EX))
{
rt_assert_handler(#EX, __FUNCTION__, __LINE__);
}
EX就是一个值 当EX是1是真 那就没事儿 但是为0是假就会出事
比如serial != RT_NULL是假 的话就会rt_assert_handler(#EX, FUNCTION, LINE);
void rt_assert_handler(const char *ex_string, const char *func, rt_size_t line)
{
rt_kprintf("(%s) assertion failed at function:%s, line number:%d n", ex_string, func, line);
}
#EX 会string的显示serial != RT_NULL 再显示函数的行号!!!
ARM微处理器支持的四种类型堆栈工作方式
说明:堆栈严格来说应该叫做栈,栈(Stack)是限定仅在一端进行插入或删除操作的线性表。因此,对栈来说,可以进行插入或删除操作的一端端称为栈顶(top),相应地,另一端称为栈底(bottom)。不含元素的空表称为空栈。由于堆栈只允许在一端进行操作,因而按照后进先出(LIFO-LastIn First Out)的原理运作。
从栈顶的定义来看,栈顶的位置是可变的。空栈时,栈顶和栈底重合;满栈时,栈顶离栈底最远。
| 项目 | Value |
|---|---|
| Full descending 满递减堆栈 | 堆栈首部是高地址,堆栈向低地址增长。栈指针总是指向堆栈最后一个元素(最后一个元素是最后压入的数据)。ARM-Thumb过程调用标准和ARM、Thumb C/C++ 编译器总是使用Full descending 类型堆栈。 |
| Full ascending 满递增堆栈 | 堆栈首部是低地址,堆栈向高地址增长。栈指针总是指向堆栈最后一个元素(最后一个元素是最后压入的数据)。 |
| Empty descending 空递减堆栈 | 堆栈首部是低地址,堆栈向高地址增长。栈指针总是指向下一个将要放入数据的空位置。 |
| Empty ascending 空递增堆栈 | 堆栈首部是高地址,堆栈向低地址增长。栈指针总是指向下一个将要放入数据的空位置。 |
满堆栈的关键词是最后一个已使用的地址,空堆栈是第一个没有使用的地址。
四种组合:满递增(FA)、空递增(EA)、满递减(FD)、空递减(ED)。
入栈规律:
(1)满堆栈操作先调整SP,然后存入数据。
(2)空堆栈操作先存入数据,然后调整SP。
(3)递增堆栈调整SP时,执行SP=SP+4
(4)递减堆栈调整SP时,执行SP=SP-4
出栈规律正好与入栈相反,也就是入栈的逆操作。
(1)空堆栈操作先调整SP,然后存入数据。
(2)满堆栈操作先存入数据,然后调整SP。
(3)递减堆栈调整SP时,执行SP=SP+4
(4)递增堆栈调整SP时,执行SP=SP-4
关于内存堆栈的理解
C++内存区域分为5个区域。分别是堆,栈,自由存储区,全局/静态存储区和常量存储区。
| 名称 | 说明 |
|---|---|
| 栈 | 由编译器在需要的时候分配,在不需要的时候自动清除的变量存储区。里面通常是局部变量,函数参数等。 |
| 堆 | 由new分配的内存块,他们的释放编译器不去管,由我们的应用程序去控制,一般一个new对应一个delete。如果程序员没有释放掉,那么在程序结束后,操作系统会自动回收。 |
| 自由存储区 | 由malloc等分配的内存块,和堆十分相似,不过它使用free来结束自己的生命。 |
| 全局/静态存储区 | 全局变量和静态变量被分配到同一块内存中,在以前的c语言中。全局变量又分为初始化的和未初始化的,在c++里面没有这个区分了,他们共同占用同一块内存。 |
| 常量存储区 | 这是一块比较特殊的存储区,里面存放的是常量,不允许修改。 |
C++内存区域中堆和栈的区别:
- 管理方式不同:栈是由编译器自动管理,无需我们手工控制;对于堆来说,释放由程序员完成,容易产生内存泄漏。
- 空间大小不同:一般来讲,在32为系统下面,堆内存可达到4G的空间,从这个角度来看堆内存几乎是没有什么限制的。但是对于栈来讲,一般都是有一定空间大小的,例如,在vc6下面,默认的栈大小好像是1M。当然,也可以自己修改:打开工程。 project–>setting–>link,在category中选中output,然后再reserve中设定堆栈的最大值和 commit。
- 能否产生碎片:对于堆来讲,频繁的new/delete势必会造成内存空间的不连续,从而造成大量的碎片,使程序效率降低。对于栈来讲,则不会存在这个问题。
- 生长方向不同:对于堆来讲,生长方向是向上的,也就是向着内存地址增加的方向;对于栈来讲,它的生长方式是向下的,是向着内存地址减小的方向增长。
- 分配方式不同:堆都是动态分配的;栈有静态和动态两种分配方式。静态分配由编译器完成,比如局部变量的分配。动态分配由alloca函数进行、但栈的动态分配和堆是不同的,它的动态分配由编译器进行释放,无需我们手工实现。
- 分配效率不同:栈是机器系统提供的数据结构,计算机会在底层对栈提供支持:分配专门的寄存器存放栈的地址,压栈出栈都有专门的指令执行,这就决定了栈的效率比较高。堆则是c/c++库函数提供的,机制很复杂。库函数会按照一定的算法进行分配。显然,堆的效率比栈要低得多。
理解关键点:
- 在内存中,“堆”和“栈”共用全部的自由空间,只不过各自的起始地址和增长方向不同,它们之间并没有一个固定的界限,如果在运行时,“堆”和 “栈”增长到发生了相互覆盖时,称为“栈堆冲突”,系统肯定垮台。由于开销方面的原因,各种编译在实现中都没有考虑解决这个问题,只有靠设计者自己解决,比如增加内存等。
- 进程内存中的映像,主要有代码区,堆(动态存储区,new/delete的动态数据),栈,静态存储区
- 内存区域地址从低到高的方向:代码区,静态存储区,堆,栈
- 堆”和“栈”是独立的概念平常说的“堆栈”实际上是两个概念:“堆”和“栈”。在英文中,堆是heap,栈是stack,不知道什么时候,什么原因,在中文里,这两个不同的概念硬是被搞在一起了,所以,围绕这个混合词所发生的误解和争执这几年就没有断过。
- “栈”一般是由硬件(CPU)实现的,CPU用栈来保存调用子程序(函数)时的返回地址,高级语言有时也用它作为局部变量的存储空间。
- “堆”是个实实在在的软件概念,使用与否完全由编程者“显示地(explicitly)”决定,如malloc。
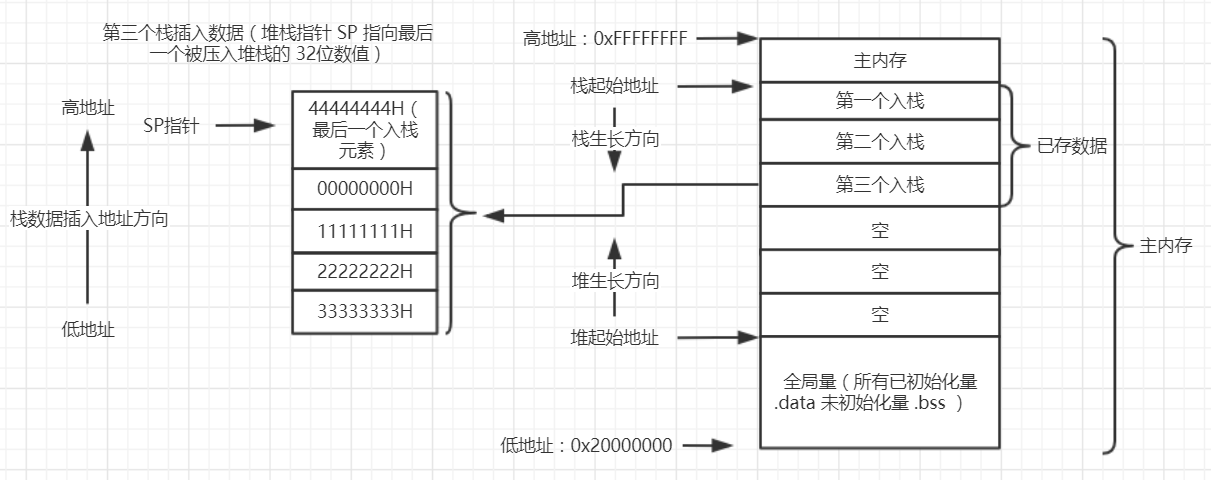
向下生长的满栈模型(满递减堆栈)
Cortex‐M3 使用的是“向下生长的满栈”模型。堆栈指针 SP 指向最后一个被压入堆栈的 32位数值。在下一次压栈时, SP 先自减 4,再存入新的数值。
下图是入栈操作: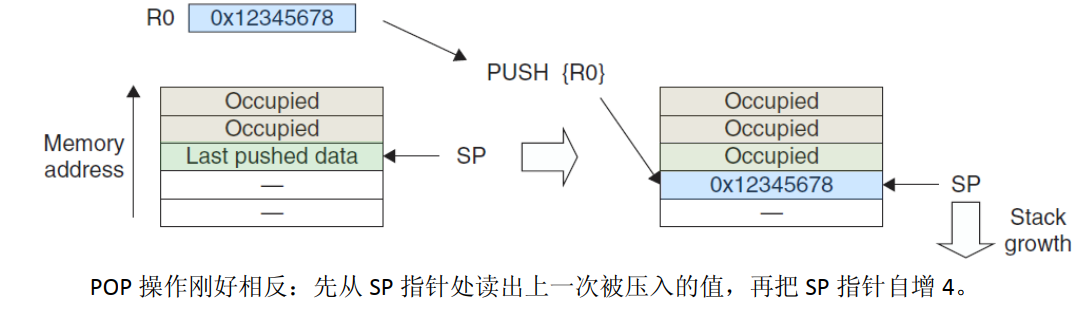
下图是出栈操作:
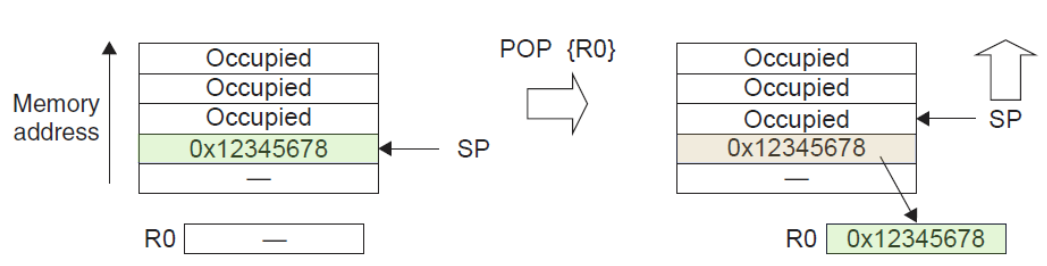
虽然 POP 后被压入的数值还保存在栈中,但它已经无效了,因为为下次的 PUSH 将覆盖它的值!在进入 ISR 时, CM3 会自动把一些寄存器压栈,这里使用的是进入 ISR 之前使用的 SP指针( MSP 或者是 PSP)。离开 ISR 后,只要 ISR 没有更改过 CONTROL[1],就依然使用先前的 SP 指针来执行出栈操作。
下图是Context-M3CPU的堆栈生长图:
限于篇幅原因后续的分析放在第二篇中。
最后
以上就是愤怒乐曲最近收集整理的关于STM32 RT-Thread 系统分析(3)-线程管理之线程切换(系统移植基础篇一)前言CPU 架构移植的全部内容,更多相关STM32内容请搜索靠谱客的其他文章。








发表评论 取消回复