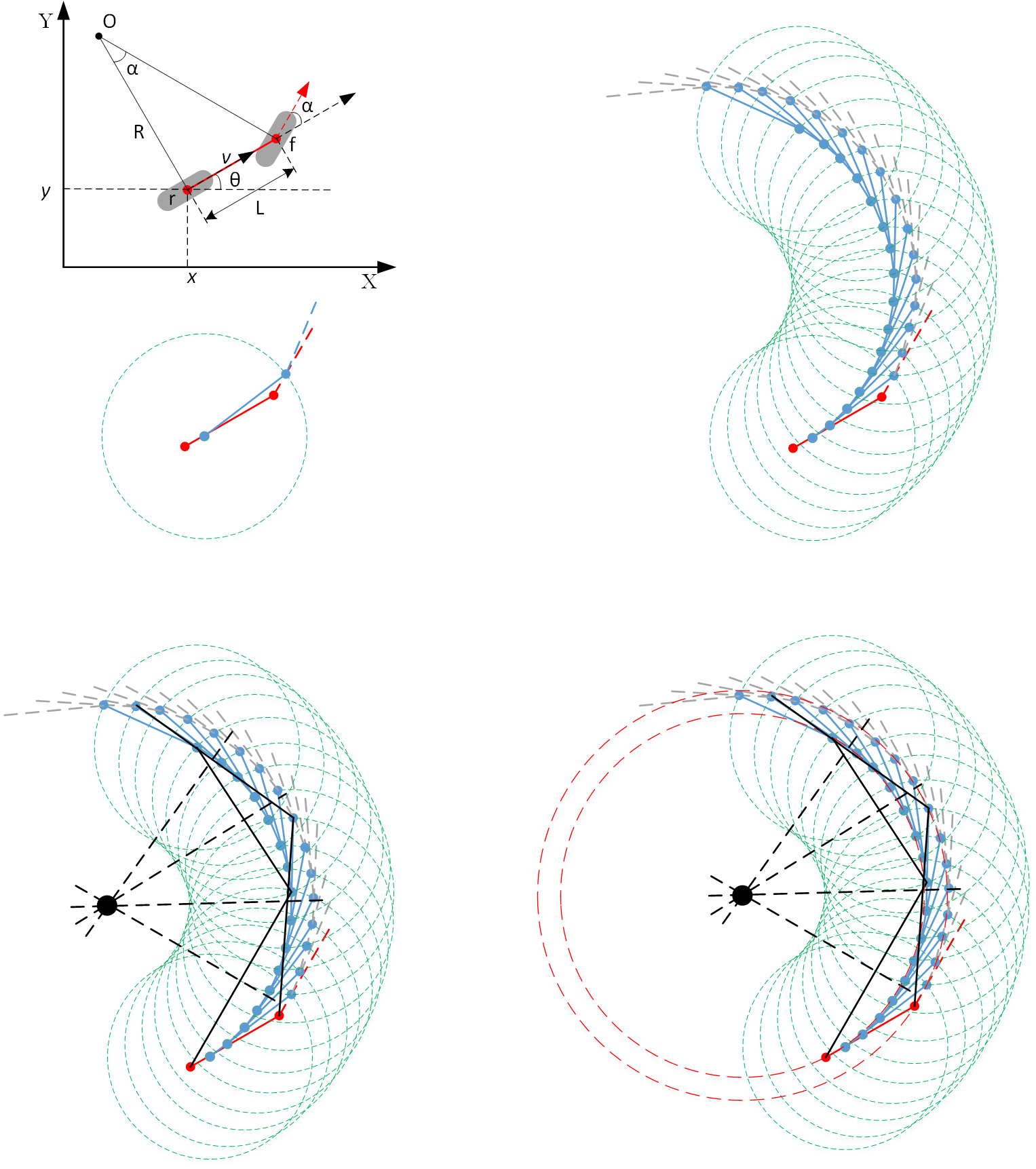
自行车模型运动规律图解
参数说明:
前轮中心f
后轮中心r
后轮中心速度v
前后轮轴距为L
车身横摆角(朝向)θ
前轮转向角α
转向中心O
后轮转向半径R
模拟方式:
1、车辆沿车身方向行走一个非常小的距离
2、即以后轮中心r为原点,以半径L画圆,此时与前轮朝向延长线交点即为前轮中心f的位置。
3、重复上述1-2步,经过一定时间,对后轮中心、前轮中心走过的位置进行拟合变得到转向中心。
结论:
车辆前后轮转弯半径不一致,但是是个同心圆。
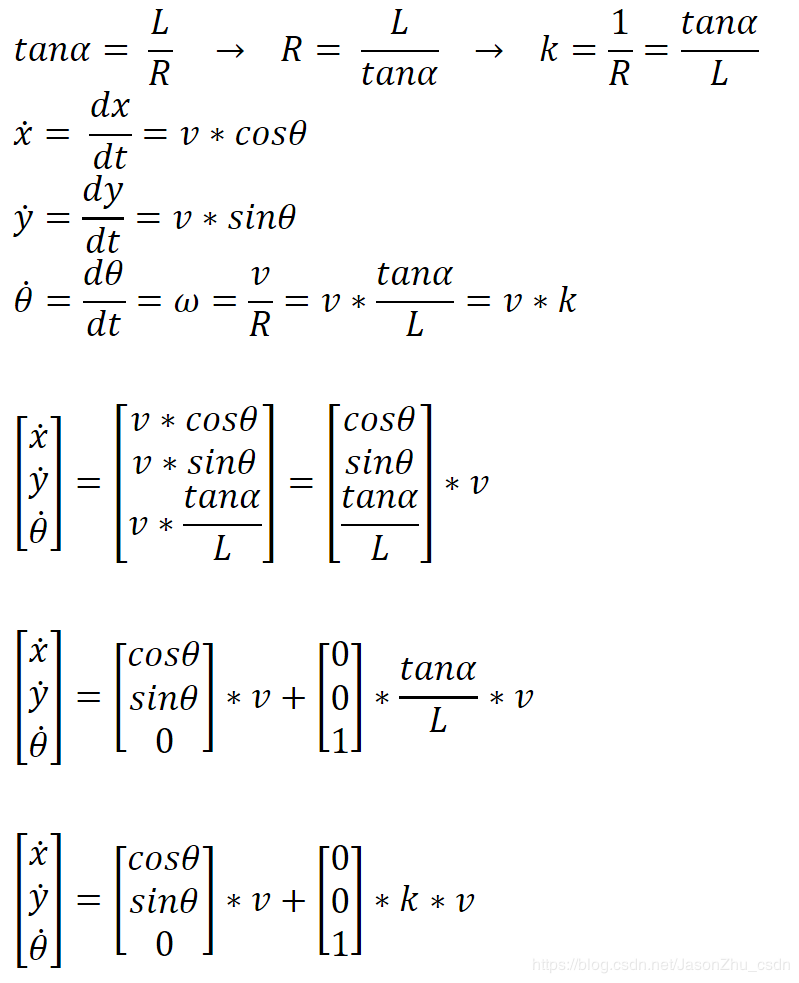
变量关系:
最后
以上就是现代美女最近收集整理的关于【自动驾驶】运动控制自行车模型运动规律图解自行车模型运动规律图解的全部内容,更多相关【自动驾驶】运动控制自行车模型运动规律图解自行车模型运动规律图解内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复