目录
车联网数字孪生系统
自动驾驶仿真测试闭环系统搭建
相关使用的工具:
术语
车联网数字孪生系统
自动驾驶仿真测试闭环系统搭建
-
自动驾驶场景搭建
-
硬件设备设置进入场景中进行仿真
-
研究分析车辆算法仿真性能
相关使用的工具:
carmaker软件_现有的自动驾驶仿真软件现状总结_weixin_39875167的博客-CSDN博客
现有的无人驾驶仿真软件主要包括CarSim、CarMaker、PreScan、PTV Vissim、SUMO、VIRES VTD、rFpro、Cognata、VIRES VTD、51Sim-One、Pilot-D GaiA、Metamoto、腾讯TAD Sim仿真平台、 百度 Apollo、AirSim 、NVIDIA Drive ConstellationWaymo Carcraft、PanoSim等
-
Prescan:无人驾驶仿真软件
通过2d生成3d三维场景
-
CarMaker
-
rFpro
-
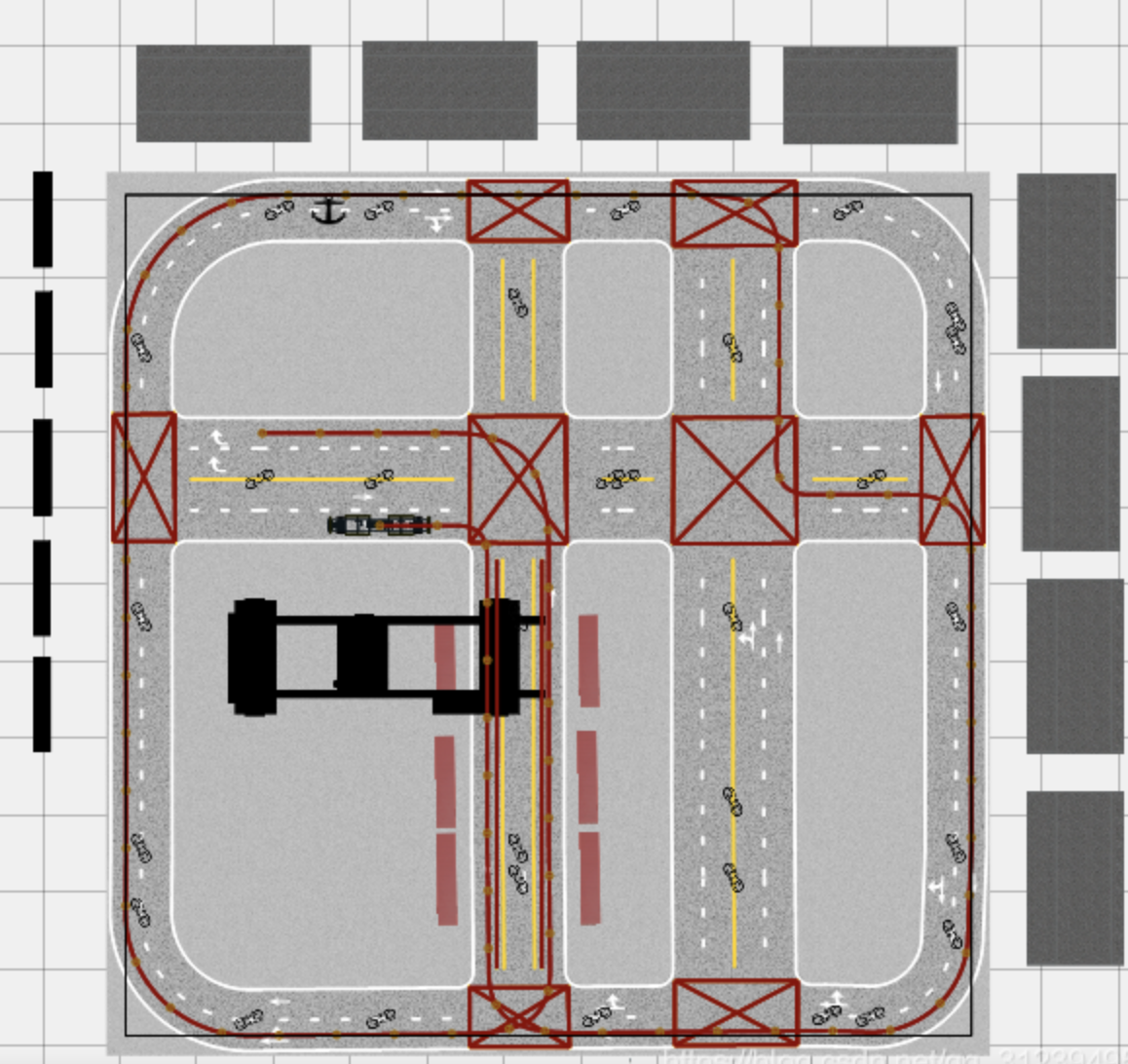
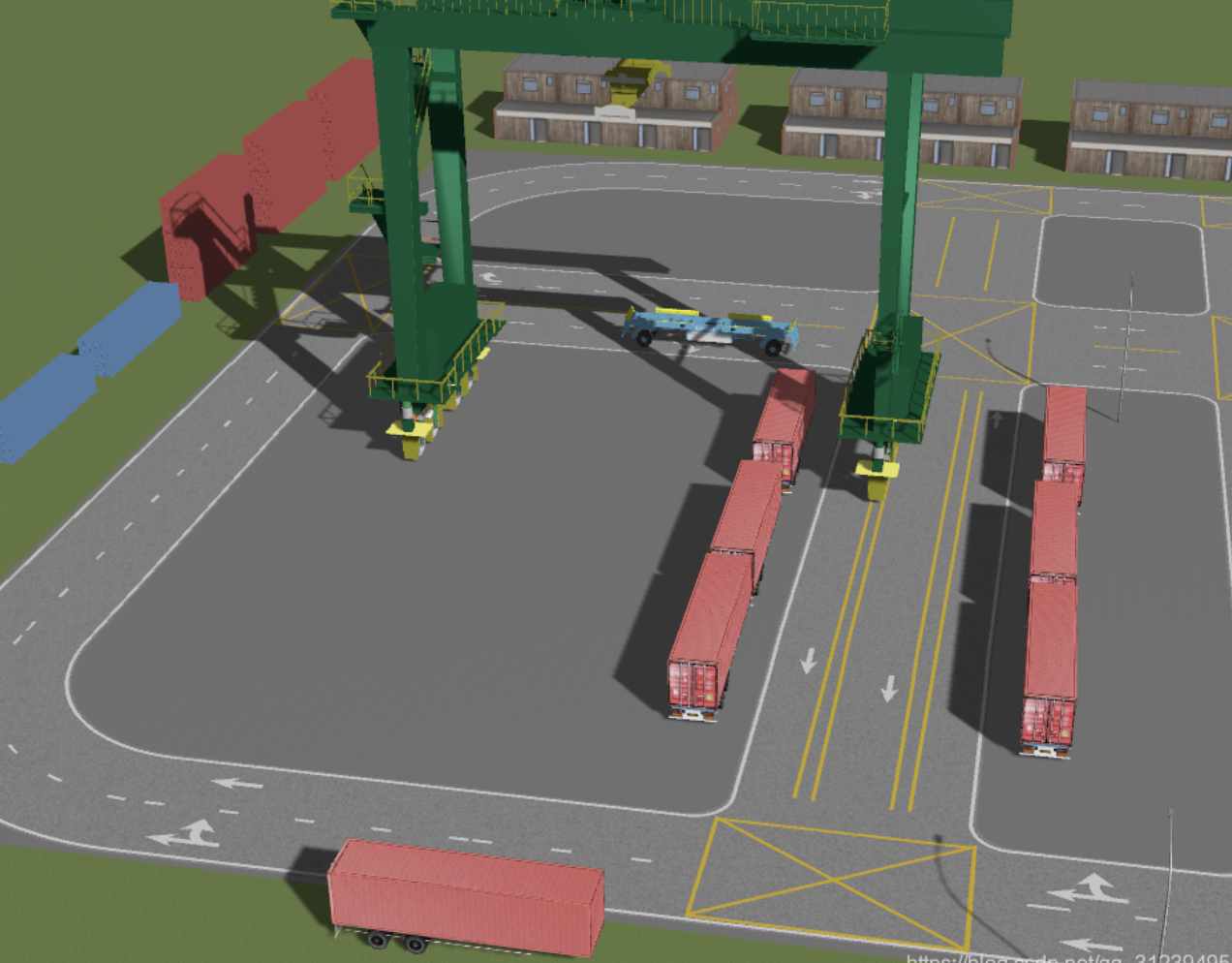
Sumo
GitHub - eclipse/sumo: Eclipse SUMO is an open source, highly portable, microscopic and continuous traffic simulation package designed to handle large networks. It allows for intermodal simulation including pedestrians and comes with a large set of tools for scenario creation.
-
Simulink
Simulink是美国Mathworks公司推出的MATLAB中的一种可视化仿真工具。Simulink是一个模块图环境,用于多域仿真以及基于模型的设计。它支持系统设计、仿真、自动代码生成以及嵌入式系统的连续测试和验证。 [1] Simulink提供图形编辑器、可自定义的模块库以及求解器,能够进行动态系统建模和仿真。 [2]
Simulink与MATLAB相集成,能够在Simulink 中将MATLAB算法融入模型,还能将仿真结果导出至 MATLAB 做进一步分析。Simulink应用领域包括汽车、航空、工业自动化、大型建模、复杂逻辑、物理逻辑,信号处理等方面。
-
carsim
Carsim/TrucksimMSC(Mechanical Simulation Corporation)成立于1996年,脱离于国际著名的科研机构UMTRI(密歇根大学交通运输研究所),主要创始人是国际知名的车辆动力学专家 Thomas D. Gillespie,Michael Sayers和Steve Hann。MSC是专业的汽车系统仿真软件开发公司,其主要商业产品是CarSim、TruckSim、BikeSim和SuspensionSim,该系列软件被国际上众多的汽车制造商、零部件供应商所采用,已成为汽车行业的标准软件,享有很高的声誉。MSC自主开发了多刚体动力学软件VehicleSim,VehicleSim由人工智能语言LISP编写而成,它可以根据用户输入的简单系统定义,推导出复杂的多刚体机械系统动力学模型并生成相应的计算机程序,因而被广泛地应用在汽车、机器人和卫星等领域。MSC利用VehicleSim技术开发出CarSim、TruckSim和 BikeSim。另外,MSC公司有强大的技术队伍,可以为用户提供完整的解决方案。
简单软件操作
Carsim使用_蜗牛跑得快的博客-CSDN博客_carsim
-
simulnk
术语
1、ACC: 自适应巡航
adaptive Cruise Control(控制辅助类术语)
实时监测车辆前方行驶环境,在设定的速度范国内自动调整行驶速度,以适应前方车辆和/或道路条件等引起的驾驶环境变化。
2.ADAS:先进驾驶辅助系统
advanced driver assistance systems
利用安装在车辆上的传感、通信、决策及执行等装置,实时监测驾驶员、车辆及其行驶环境,并通过信息和 /或运动控制等方式辅助驾驶员执行驾驶任务或主动避免 /减轻碰撞危害的各类系统的总称。
3、ADB:自适应远光灯
adaptive driving beam(控制辅助类术语)
能够自动调整投射范围以减少对前方或对向其它车辆驾驶员炫目干扰的远光灯。
4、AEB: 自动紧急制动
advanced/automatic emergency braking
(控制辅助类术语)
实时监测车辆前方行驶环境,并在可能发生碰撞危险时自动启动车辆制动系统使车辆减速,以避免 碰撞或减轻碰撞后果。
5、AES:自动紧急转向
automatic emergency steering (控制辅助类术语)
实时监测车辆前方、侧方及侧后方行驶环境,在可能发生碰撞危险时自动控制车辆转向,以避免碰 撞或减轻碰撞后果。
6、AFL:自适应前照灯
adaptive front light(控制辅助类术语)
能够自动进行近光/远光切换或投射范国控制,从而为适应车辆各种使用环境提供不同类型光束的前照灯。
- 原创作者招募
上传原创文档,瓜分百万现金奖
立即参与
7、AMAP:加速踏板防误踩
anti-maloperation for accelerator pedal
(控制辅助类术语)
在车辆起步 或低速行驶时,因驾驶员误踩加速踏板产生紧急加速而可能与周边障碍物发生碰撞时,自动抑制车辆加速。
8、AVM:全景影像监测
around view monitoring(信息辅助类术语)向驾驶员提供车辆周国360°C范围内环境的实时影像信息。
9、BSD:盲区监测
blind spot detection(信息辅助类术语)
实时监测驾驶员视野盲区,并在其盲区内出现其它道路使用者时发出提示或警告信息。
10、CSW:弯道速度预警
curve speed warning (信息辅助类术语)
对车辆状态和前方弯道进行监测,当行驶速度超过弯道的安全通行车速时发出警告信息。
11、DAM:驾驶员注意力监测
driver attention monitoring(信息辅助类术语)
实时监测驾驶员状态并在确认其注意力分散时发出提示信息。
更多可看这里
自动驾驶词汇概念介绍 - 百度文库
最后
以上就是鲜艳超短裙最近收集整理的关于(无人驾驶仿真软件整理)车联网数字孪生系统的全部内容,更多相关(无人驾驶仿真软件整理)车联网数字孪生系统内容请搜索靠谱客的其他文章。








发表评论 取消回复