AI视野·今日CS.Robotics 机器人学论文速览
Mon, 27 Sep 2021
Totally 21 papers
????上期速览✈更多精彩请移步主页
Interesting:
????SIM2REALVIZ, 机器人位姿估计可视化系统(from Liris, INSA-Lyon 法国国立应用科学学院)

????用于室内机器人操作的高精度深度图生成, (from 美国丰田研究院)
code:https://sites.google.com/view/stereoformobilemanipulation
Daily Robotics Papers
| RMPs for Safe Impedance Control in Contact-Rich Manipulation Authors Seiji Shaw, Ben Abbatematteo, George Konidaris 操作空间中的可变阻抗控制是一种学习接触丰富操作行为的有前途的方法。这种方法的主要挑战之一是产生一种确保手臂和环境安全的操作行为。这种行为通常是通过惩罚不安全行为的奖励函数来实现的,例如障碍物碰撞,关节限制扩展,但这种方法并不总是有效,并且不会导致可以在稍微不同的环境中重用的行为。 |
| CLIPort: What and Where Pathways for Robotic Manipulation Authors Mohit Shridhar, Lucas Manuelli, Dieter Fox 我们如何才能让机器人具备精确操纵物体的能力,同时还能根据抽象概念对它们进行推理?最近的操纵工作表明,端到端网络可以学习需要精确空间推理的灵巧技能,但这些方法往往无法推广到新目标或快速学习跨任务的可转移概念。同时,通过对大规模互联网数据进行训练,在学习视觉和语言的可概括语义表示方面取得了很大进展,但是这些表示缺乏细粒度操作所需的空间理解。为此,我们提出了一个框架,它结合了两个世界中最好的两个流体系结构与语义和空间路径,用于基于视觉的操作。具体来说,我们提出了 CLIPort,这是一种语言条件模仿学习代理,它结合了 CLIP 1 的广泛语义理解和 Transporter 2 的空间精度 where。我们的端到端框架能够解决各种语言指定的桌面任务,从打包看不见的物体到折叠布料,所有这些任务都没有任何物体姿势、实例分割、记忆、符号状态或句法结构的明确表示。在模拟和现实世界设置中的实验表明,我们的方法在少数镜头设置中具有数据效率,并且可以有效地推广到可见和不可见的语义概念。 |
| Free Energy Principle for State and Input Estimation of a Quadcopter Flying in Wind Authors Fred Bos, Ajith Anil Meera, Dennis Benders, Martijn Wisse 来自神经科学的自由能原理通过称为动态期望最大化 DEM 的数据驱动模型学习算法提供了一种受大脑启发的感知方案。本文旨在介绍一种实验设计,以首次实验确认 DEM 作为真实机器人的状态和输入估计器的有用性。通过在未建模的风动力学下进行的一系列四轴飞行器飞行实验,我们证明 DEM 可以利用来自有色噪声的信息,通过使用广义坐标进行准确的状态和输入估计。我们通过其最小的估计误差证明了 DEM 在有色噪声下的状态估计相对于其他基准(如状态增强、SMIKF 和卡尔曼滤波)的优越性能。我们展示了 DEM 和未知输入观察者 UIO 在输入估计方面的相似性。 |
| A Bayesian-Based Approach to Human Operator Intent Recognition in Remote Mobile Robot Navigation Authors Dimitris Panagopoulos, Giannis Petousakis, Rustam Stolkin, Grigoris Nikolaou, Manolis Chiou 本文解决了遥控机器人导航过程中人类操作员意图识别的问题。在这种情况下,识别操作员的预期导航目标可以使人工智能 AI 代理能够在先进的人机交互框架中协助操作员。我们提出了一种贝叶斯算子意图识别 BOIR 概率方法,该方法利用 i 一个观察模型,该模型将信息融合为多个观察源的加权组合,提供几何信息 ii 指示状态演变的过渡模型和 iii 动作模型,主动意图识别模型 AIRM ,使操作员能够异步传达其明确意图。在实验中评估了所提出的方法,其中控制远程移动机器人的操作员在具有不同地图和障碍物布局的各种场景下执行导航和探索任务。 |
| Improving Standing Balance Performance through the Assistance of a Mobile Collaborative Robot Authors Francisco J. Ruiz Ruiz, Alberto Giammarino, Marta Lorenzini, Juan M. Gandarias, Jesus M. Gomez de Gabriel, Arash Ajoudani 这封信介绍了机器人系统的设计和开发,可为老年人或患有共济失调或帕金森氏症等神经系统疾病的人提供身体帮助。特别是,我们建议使用具有交互辅助全身界面的移动协作机器人来帮助无法保持平衡的人。该机器人系统由一个全向移动底座、一个高负载机械臂和一个作为支撑手柄的导纳式接口组成,同时测量人为交互力。通过将身体质心 CoM 投影到代表准静态压力中心 CoP 的支撑多边形 SP 来估计人体的姿势平衡。为了响应相互作用力和对人体姿势的跟踪,机器人可以产生辅助力以在失去平衡时恢复平衡。否则,在正常站立或行走期间,它将通过产生耦合的手臂和底座运动以最小的无反作用力跟随用户。作为平衡恢复策略,我们提出了两种策略,并在健康人类参与者的实验室环境中对其进行评估。 |
| Toward Efficient and Robust Multiple Camera Visual-inertial Odometry Authors Yao He, Huai Yu, Wen Yang, Sebastian Scherer 效率和鲁棒性是视觉惯性里程计 VIO 系统的基本标准。为了处理海量视觉数据,CPU 资源和计算延迟的高成本限制了 VIO 与其他应用程序集成的可能性。近来,强大的嵌入式 GPU 具有提升前端图像处理能力的巨大潜力。同时,多相机系统可以增加后端优化的视觉约束。受这些见解的启发,我们将 GPU 增强算法纳入 VIO 领域,从而提出了具有 NVIDIA 视觉编程接口 VPI 的新前端。这个新的前端然后启用多相机 VIO 功能关联并提供更稳定的后端姿势优化。使用我们的新前端在单目数据集上进行的实验表明,与原始 VIO 相比,CPU 资源占用率和计算延迟降低了 40.4 和 50.6 倍,同时不损失准确性。 |
| Learning Relative Interactions through Imitation Authors Giorgia Adorni, Elia Cereda 在这个项目中,我们训练了一个神经网络,通过模仿学习来执行机器人和环境中物体之间的特定交互。特别是,我们解决了将机器人移动到相对于某个物体的固定姿势的任务,然后扩展我们的方法来处理该物体周围的任意姿势。我们表明,一个简单的网络,具有相对较少的训练数据,能够在固定姿势任务上达到非常好的性能,而要令人满意地执行任意姿势任务还需要做更多的工作。 |
| Learning to Walk in Minutes Using Massively Parallel Deep Reinforcement Learning Authors Nikita Rudin, David Hoeller, Philipp Reist, Marco Hutter 在这项工作中,我们提出并研究了一种训练设置,该设置通过在单个工作站 GPU 上使用大规模并行性来实现现实世界机器人任务的快速策略生成。我们分析和讨论了大规模并行机制中不同训练算法组件对最终策略性能和训练时间的影响。此外,我们提出了一种新颖的游戏启发课程,非常适合与数千个模拟机器人并行训练。我们通过训练四足机器人 ANYmal 在具有挑战性的地形上行走来评估该方法。并行方法允许在 4 分钟内对平坦地形进行训练,而在不平坦地形上则需要 20 分钟。与之前的工作相比,这代表了多个数量级的加速。最后,我们将策略转移到真正的机器人上以验证该方法。 |
| A Brain Inspired Learning Algorithm for the Perception of a Quadrotor in Wind Authors Ajith Anil Meera, Martijn Wisse 对机器人大脑启发学习算法的探索最终形成了神经科学的自由能原理,该原理将大脑的感知和行动建模为对其自由能目标的优化。基于这个想法,我们提出了一种估计算法,用于在未建模的风力条件下准确预测四旋翼飞行器的输出。这项工作背后的关键思想是将未建模的风动力学和模型的非线性误差作为系统中的有色噪声进行处理,并利用它进行准确的输出预测。本文首次通过实验验证了使用动态期望最大化 DEM 的广义坐标对机器人感知的有效性。通过真实的飞行实验,我们表明估计器在输出预测中的误差最小,优于经典估计器。基于实验结果,我们扩展了 DEM 算法,用于模型顺序选择,以实现完整的黑盒识别。 |
| Towards Autonomous Crop-Agnostic Visual Navigation in Arable Fields Authors Alireza Ahmadi, Michael Halstead, Chris McCool 机器人在农田中的自主导航对于从作物监测到杂草管理和施肥的每一项任务都是必不可少的。许多当前的方法依赖于精确的 GPS,然而,这种技术很昂贵并且也容易出现故障,例如由于缺乏报道。因此,通过可以解释其环境的传感器(例如相机)进行导航对于实现农业自主目标非常重要。在本文中,我们介绍了一种纯粹基于视觉的导航方案,该方案能够可靠地引导机器人穿过大田。独立于任何全局定位或映射,这种方法能够准确地跟踪作物行并在行之间切换,仅使用机载摄像头。借助新型作物行检测和新型作物行切换技术,我们的导航方案可以部署在具有不同生长阶段不同冠层类型的广泛领域。我们使用我们的农业机器人平台 BonnBot I 在各种照明条件下在五个不同领域广泛测试了我们的方法。 |
| SIM2REALVIZ: Visualizing the Sim2Real Gap in Robot Ego-Pose Estimation Authors Theo Jaunet, Guillaume Bono, Romain Vuillemot, Christian Wolf 机器人社区已经开始严重依赖越来越逼真的 3D 模拟器,以对大量数据的机器人进行大规模训练。但是一旦机器人部署在现实世界中,模拟差距以及现实世界中的变化,例如灯光、物体位移导致错误。在本文中,我们介绍了 Sim2RealViz,这是一种可视化分析工具,可帮助专家理解和缩小机器人自我姿态估计任务的差距,即使用训练有素的模型估计机器人的位置。 Sim2RealViz 显示给定模型的详细信息及其实例在模拟和现实世界中的性能。专家可以识别在给定位置影响模型预测的环境差异,并通过与模型假设的直接交互进行探索以修复它。 |
| Indoor Navigation Algorithm Based on a Smartphone Inertial Measurement Unit and Map Matching Authors Taewon Kang, Younghoon Shin 我们提出了一种基于行人航位推算 PDR 的室内导航算法,使用智能手机中的惯性测量单元和地图匹配。所提出的室内导航系统是用户友好和方便的,因为它不需要除了智能手机之外的其他设备,并且可以与手拿智能手机以随意姿势行走的行人一起工作。由于 PDR 的性能随着时间的推移而下降,我们使用地图匹配方法与已知的室内地图大大降低了 PDR 估计的轨迹的位置误差。为了验证所提出的室内导航算法,我们使用商用 Android 智能手机在真实的室内环境中进行了实验。 |
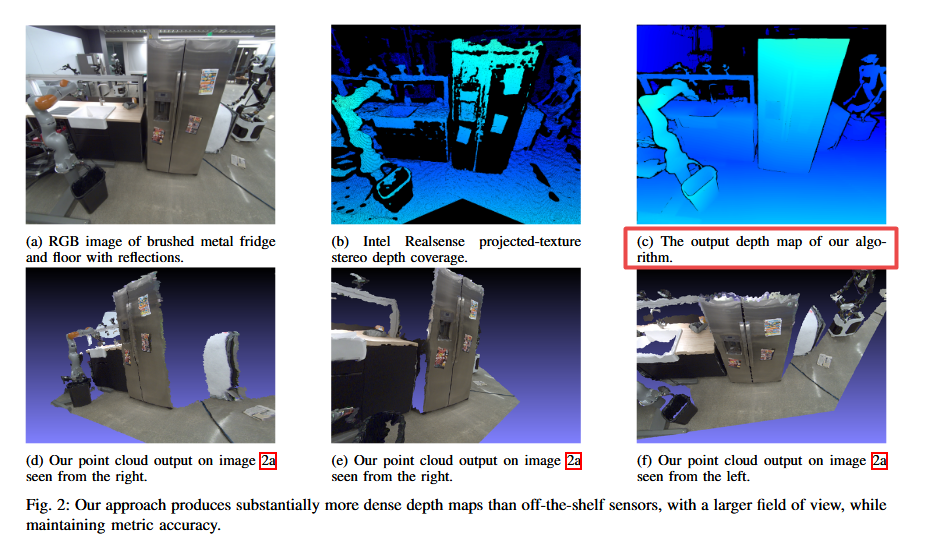
| A Learned Stereo Depth System for Robotic Manipulation in Homes Authors Krishna Shankar, Mark Tjersland, Jeremy Ma, Kevin Stone, Max Bajracharya 我们提出了一种被动立体深度系统,该系统可以在 30 毫秒内以 2560x2048 的分辨率生成针对人类环境优化的密集而准确的点云,包括黑暗、无纹理、薄、反射和镜面表面和物体,具有 384 个视差。该系统由将学习立体匹配与工程过滤相结合的算法、训练和数据混合方法以及传感器硬件设计组成。我们的架构比在 Middlebury 和 Flying Things Stereo Benchmarks 上表现相似的方法快 15 倍。为了有效监督该模型的训练,我们结合了使用现成深度传感器标记的真实数据,以及许多不同的渲染、模拟标记数据集。我们通过以深度图和点云的形式呈现大量定性结果、验证我们系统的度量精度的实验以及在具有挑战性的对象和场景上与其他传感器的比较来证明我们系统的功效。 |
| Obstacle-aware Waypoint Generation for Long-range Guidance of Deep-Reinforcement-Learning-based Navigation Approaches Authors Linh K stner, Xinlin Zhao, Zhengcheng Shen, Jens Lambrecht 在拥挤的环境中导航移动机器人是各种用例中的一项基本任务,例如交付、医疗保健或物流。深度强化学习 DRL 成为替代过于保守的方法的替代方法,并有望实现更高效和灵活的导航。然而,深度强化学习由于其近视性而仅限于局部导航。先前的研究工作提出了将深度强化学习与传统方法相结合的各种方法,但一个常见的问题是由于环境中人类和其他物体的不可预测性,高度动态环境的复杂性。在本文中,我们提出了一种分层航路点生成器,它考虑移动障碍物,从而为基于深度强化学习的本地规划器生成更安全、更稳健的航路点。因此,我们利用 Delaunay 三角测量对障碍物进行编码,并结合扩展的混合 A Star 方法在时间状态空间中有效地搜索最佳解决方案。 |
| All-in-One: A DRL-based Control Switch Combining State-of-the-art Navigation Planners Authors Linh K stner, Johannes Cox, Teham Buiyan, Jens Lambrecht 移动机器人的自主导航是交付、协助或物流等用例中的一个重要方面。虽然传统的规划方法很好地集成到现有的导航系统中,但它们在高度动态的环境中挣扎。另一方面,基于深度强化学习的方法在动态避障方面表现出优异的性能,但不适合远程导航和与局部最小值的斗争。在本文中,我们提出了一种基于深度强化学习的控制开关,它能够仅基于传感器数据观察在不同的规划范式之间进行选择。因此,我们开发了一个界面来有效地操作基于多个模型以及基于学习的本地规划器,并集成了由控制开关选择的各种最先进的规划器。随后,我们分别针对每个规划器评估了我们的方法,并发现导航性能有所改进,尤其是对于高度动态的场景。 |
| Enhancing SUMO simulator for simulation based testing and validation of autonomous vehicles Authors Arpan Kusari, Pei Li, Hanzhi Yang, Nikhil Punshi, Mich Rasulis, Scott Bogard, David J. LeBlanc 当前的自动驾驶汽车 AV 模拟器旨在提供大规模测试,以可控制、可重复的方式证明各种条件下的能力。但是,它们存在某些缺陷,包括需要用户专业知识和复杂不方便的自定义场景创建教程。城市交通模拟 SUMO 模拟器作为开源 AV 模拟器被广泛使用,但也存在类似问题,这使得入门级从业者很难在没有大量时间投入的情况下使用模拟器。在这方面,我们为 SUMO 模拟器提供了两项增强功能,旨在大规模改善用户体验并为周围交通提供类似真实生活的可变性。首先,我们针对高速公路和城市自然驾驶数据校准汽车跟随模型,智能驾驶员模型 IDM,并从参数分布中自动采样以创建背景车辆。其次,我们将 SUMO 与 OpenAI 健身房相结合,创建了一个 Python 包,该包可以运行基于真实世界高速公路和城市布局的模拟,具有可通过任何 AV 管道处理的通用输出观察和输入动作。 |
| Adaptive Sampling using POMDPs with Domain-Specific Considerations Authors Gautam Salhotra, Christopher E. Denniston, David A. Caron, Gaurav S. Sukhatme 当应用于自适应采样问题时,我们研究了改进基于蒙特卡罗树搜索的求解器,用于部分可观察的马尔可夫决策过程 POMDP。我们提出了在推出分配、行动探索算法和计划承诺方面的改进。第一个分配不同数量的 rollout,具体取决于代理在一个剧集中采取了多少行动。我们发现在获得有关环境的一些初始信息后,推出更有价值。因此,rollout 数量的线性增加,即在每一步分配一个固定的数量,不适合自适应采样任务。第二个改变了智能体在构建规划树时选择探索的动作。我们发现,通过使用分配的 rollout 数量的知识,代理可以更有效地选择要探索的动作。第三个改进是确定代理应该从一个计划中采取多少行动。通常,代理将计划从规划树中执行第一个动作,然后从新状态再次调用规划器。使用统计技术,我们表明可以通过增加从单个规划树采取的行动数量来大大减少推出的数量,而不会影响代理的最终奖励。最后,我们通过来自水下机器人的模拟和真实水生数据的实验证明,这些改进可以结合起来,从而实现更好的自适应采样。 |
| Bridging the Last Mile in Sim-to-Real Robot Perception via Bayesian Active Learning Authors Jianxiang Feng, Jongseok Lee, Maximilian Durner, Rudolph Triebel 从合成数据中学习在物体检测等各种机器人视觉任务中很流行,因为无需人工注释即可生成大量数据。然而,当仅依靠合成数据时,我们会遇到众所周知的模拟与现实Sim to Real差距的问题,这在实践中很难完全解决。对于这种情况,需要真实的人工标注数据来弥合这一差距,在我们的工作中,我们专注于如何有效地获取这些数据。因此,我们提出了一种依赖于深度贝叶斯主动学习的 Sim to Real 管道,旨在最小化手动注释工作。我们设计了一种学习范式,可以自主选择被认为对人类专家有用的数据进行注释。为了实现这一点,提供可靠的不确定估计的贝叶斯神经网络 BNN 对象检测器适用于推断未标记数据的信息量,以执行主动学习。在我们对两个对象检测数据集的实验中,我们表明弥合现实差距所需的标记工作可以减少到少量。 |
| Lifelong 3D Object Recognition and Grasp Synthesis Using Dual Memory Recurrent Self-Organization Networks Authors Krishnakumar Santhakumar, Hamidreza Kasaei 人类在终身环境中学习识别和操作新物体,而不会忘记先前在非平稳和连续条件下获得的知识。在自治系统中,代理还需要减轻类似的行为,以不断学习新的对象类别并适应新的环境。在大多数传统的深度神经网络中,由于灾难性遗忘的问题,这是不可能的,新获得的知识会覆盖现有的表示。此外,大多数最先进的模型在识别物体或抓取预测方面表现出色,而这两项任务都使用视觉输入。处理这两项任务的组合架构非常有限。在本文中,我们提出了一种混合模型架构,它由动态增长的双记忆递归神经网络 GDM 和自动编码器组成,以同时处理对象识别和抓取。自编码器网络负责提取给定对象的紧凑表示,作为 GDM 学习的输入,并负责预测像素级对映体抓取配置。 GDM 部分旨在识别实例和类别级别的对象。我们使用内在记忆重放来解决灾难性遗忘的问题,其中情景记忆在没有外部感官信息的情况下定期重放神经激活轨迹。为了在终身设置中广泛评估所提出的模型,由于缺乏连续的 3D 对象数据集,我们生成了一个合成数据集。 |
| Sequential TOA-Based Moving Target Localization in Multi-Agent Networks Authors Qin Shi, Xiaowei Cui, Sihao Zhao, Mingquan Lu 在未知的恶劣环境中定位移动目标一直是一个严峻的挑战。这封信研究了一种基于多代理网络的新型定位系统,其中多个代理作为移动锚点向目标广播其时空信息。我们研究了移动目标如何使用单向广播信号的顺序到达时间 TOA 来定位自己。提出了一种扩展的两步加权最小二乘TSWLS方法,以在存在代理信息不确定性的情况下联合估计目标的位置和速度。我们还解决了数值稳定性的大目标时钟偏移 LTCO 问题。分析结果表明,我们的方法在小噪声下达到了 Cramer Rao 下界 CRLB。 |
| A dynamic programming algorithm for informative measurements and near-optimal path-planning Authors Peter N. Loxley, Ka Wai Cheung 信息量测是获取未知状态信息的最有效方式。我们给出了通用动态规划算法的第一原理推导,该算法通过顺序地最大化可能的测量结果的熵来返回信息测量序列。自主代理或机器人可以使用该算法来决定下一步测量的最佳位置,规划与信息测量的最佳序列相对应的路径。该算法适用于连续或离散的状态和控制,以及随机或确定性的代理动态,包括马尔可夫决策过程。最近来自近似动态编程和强化学习的结果,包括诸如 rollout 和 Monte Carlo 树搜索等在线近似,允许代理或机器人实时解决测量任务。由此产生的接近最优的解决方案包括非近视路径和测量序列,它们通常可以胜过(有时甚至是显着)常用的贪婪启发式算法,例如最大化每个测量结果的熵。 |
| Chinese Abs From Machine Translation |
Papers from arxiv.org
更多精彩请移步主页
pic from pexels.com
最后
以上就是发嗲小霸王最近收集整理的关于【AI视野·今日Robot 机器人论文速览 第二十二期】Mon, 27 Sep 2021的全部内容,更多相关【AI视野·今日Robot内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。







![[ICML 2015] Massively Parallel Methods for Deep Reinforcement LearningIntroductionDistributed ArchitectureExperiments](https://www.shuijiaxian.com/files_image/reation/bcimg2.png)
发表评论 取消回复