文章目录
- 说明
- 图片读取和写入
- 灰度转换
- 高斯滤波
- 二值化
- 边缘检测(sobel)
- 顶层文件
- 改进中- - - -
任务
读入一张bmp图片,对图片进行灰度处理,二值化以及边缘检测(sobel算子),将处理后的数据写入bmp显示,全部过程以仿真形式。我这用的vivado。
说明
在图像处理领域,要实现Sobel或者均值滤波等算法,则需要按照3*3矩阵的格式提取数据,
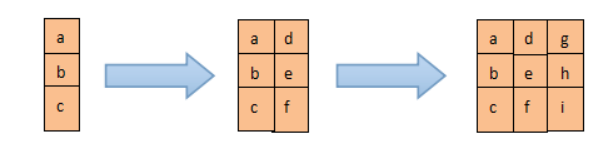
需要用到移位寄存器SHIFT RAM IP核。
Altera厂家的EDA环境下移位寄存器IP核可以实现多行的缓存输出,但是Xilinx下的Vivado环境,仅仅支持缓存输出一行数据,不过其实也无关紧要,我们这里可以使用两个SHIFT RAM IP核和正在输入的一行数据三者共同组成3行数据。
图片读取和写入
可参考FPGA-仿真读写bmp图片
使用图片(128*128):

本次实验的图片读取写入tb
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
top_tb.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.9.29
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.9.29
*
******************************************************************************/
`timescale 1ns / 1ns
module top_tb;
reg
clk;
reg
rst;
wire [23:0]
dout;
reg
din_vld;
wire
dout_vld;
//图像属性:图像宽度 图像高度 图像尺寸 图像像素点起始位
integer bmp_width;
integer bmp_high;
integer bmp_size;
integer start_index;
//bmp file id
integer bmp_file_id;
integer bmp_dout_id;
integer dout_txt_id;
//文件句柄
integer h;
//文件bmp文件数据
reg
[7:0] rd_data
[0:49300];
reg
[7:0]
rd_data2 [0:49300];
//写操作
reg
[23:0] wr_data;
integer i = 0;
integer index;
integer j = 0;
parameter CYCLE=20;
always #(CYCLE/2) clk=~clk;
initial
begin
clk=1'b1;
rst=1'b0;
#(CYCLE);
rst=1'b1;
#CYCLE;
rst=1'b0;
din_vld=1'b0;
//打开原始图像
bmp_file_id = $fopen("D:\python\pic\er.bmp","rb");
//打开输出数据
dout_txt_id = $fopen("D:\python\pic\output_file.txt","w+");
//读取bmp文件
h = $fread(rd_data,bmp_file_id);
// 图像宽度
bmp_width = {rd_data[21], rd_data[20], rd_data[19], rd_data[18]};
// 图像宽度
bmp_high = {rd_data[25], rd_data[24], rd_data[23], rd_data[22]};
// 像素起始位置
start_index = {rd_data[13], rd_data[12], rd_data[11], rd_data[10]};
// 图像尺寸
bmp_size = {rd_data[5], rd_data[4], rd_data[3], rd_data[2]};
$fclose(bmp_file_id);
//输出txt
for(index = start_index; index < bmp_size-2; index = index + 3)begin
//将像素点数据写入txt文件
din_vld=1'b1;
wr_data = {rd_data[index + 2], rd_data[index + 1], rd_data[index]};
$fwrite(dout_txt_id, "%d,", wr_data[7:0]);
$fwrite(dout_txt_id, "%d,", wr_data[15:8]);
$fwrite(dout_txt_id, "%dn", wr_data[23:16]);
#(CYCLE);
end
din_vld=1'b0;
$fclose(dout_txt_id);
end
initial
begin
#(3*CYCLE);
//打开输出图像
bmp_dout_id = $fopen("D:\python\pic\output_file.bmp","wb");//将数据写入bmp
for(i = 0; i < start_index; i = i + 1)begin //写入文件头部信息
$fwrite(bmp_dout_id, "%c", rd_data[i]);
end
j=start_index;
while(j<bmp_size) //写入像素点信息
begin
if(dout_vld==1'b1)
begin
$fwrite(bmp_dout_id, "%c", dout[7:0]);
$fwrite(bmp_dout_id, "%c", dout[15:8]);
$fwrite(bmp_dout_id, "%c", dout[23:16]);
j=j+3;
end
else
begin
j=j;
end
#CYCLE;
end
$fclose(bmp_dout_id);
end
top
u_top
(
//clock and reset
.rst
(rst),
//reset
.clk
(clk),
//clock
.rgb_din
(wr_data),
//输入数据
.din_vld
(din_vld),
//数据有效
.rgb_out
(dout),
//输出数据
.dout_vld
(dout_vld)
//数据有效
);
endmodule
灰度转换
对于彩色图像转化为灰度图像,有一个著名的色彩心理学公式,即:

但是在实际应用时,由于FPGA希望避免复杂的浮点运算,所以这里我们采用整数运算。将R、G、B三个分量对应的系数放大256倍得到整数结果:

/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
rgb2gray.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.9.30
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.9.30
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module rgb2gray
(
//clock and reset
rst,
//reset
clk,
//clock
din,
din_vld,
dout,
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input [23:0]
din;
input
din_vld;
output
[7:0]
dout;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire [23:0]
din;
wire
din_vld;
reg
[7:0]
dout;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
//RGB
reg
[7:0]
data_r;
reg
[7:0]
data_g;
reg
[7:0]
data_b;
//加权值后RGB
reg
[17:0]
pixel_r ;
reg
[17:0]
pixel_g ;
reg
[17:0]
pixel_b ;
//vld
reg
[1:0]
vld;
//
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
data_r<=8'b0;
data_g<=8'b0;
data_b<=8'b0;
end
else
begin
data_r<=din[23:16];
data_g<=din[15:8];
data_b<=din[7:0];
end
end
//vld 寄存
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld<=2'b0;
end
else
begin
vld<={vld[0],din_vld};
end
end
//RGB权值
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
pixel_r<=17'b0;
pixel_g<=17'b0;
pixel_b<=17'b0;
end
else if(vld[0]==1'b1)
begin
pixel_r<=data_r*77;
pixel_g<=data_g*150;
pixel_b<=data_b*29;
end
end
//
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout<=19'b0;
end
else if(vld[1]==1'b1)
begin
dout<=(pixel_r+pixel_g+pixel_b)>>8;
end
end
//vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld<=1'b0;
end
else
begin
dout_vld<=vld[1];
end
end
endmodule
效果展示

高斯滤波
在灰度转换过程中,可能会因为取整操作引入噪声,所以接下来使用高斯滤波算法来去除灰度转化过程中引入的噪声。在本次使用实际处理过程中发现使用了高斯滤波最后效果并不理想,最后是去掉了这个模块,有兴趣的童鞋可以研究。
高斯滤波的具体操作是使用一个NN卷积模板对整幅图像扫描,用模板确定的邻域内的像素加权平均值代替模板中心像素点的值。本文使用的33卷积模板如下:
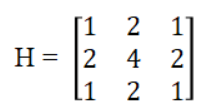
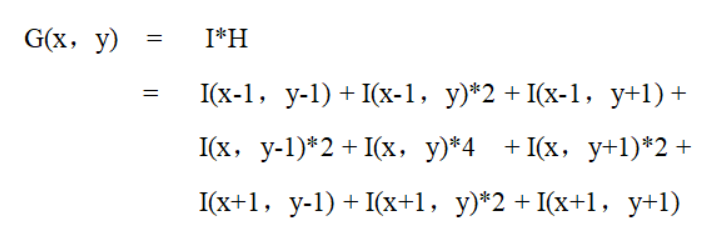
其中,I(x,y)表示原图像中坐标为(x,y)的像素值;G(x,y)表示高斯滤波之后的值。这里为了计算方便,选取的模板H的权重系数都是2的系数。模板中心的权值最大,这样有利于克服边界效应,避免经过高斯滤波之后图像模糊。
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
gauss.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.10.8
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.10.8
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module gauss
(
//clock and reset
rst,
//reset
clk,
//clock
din,
din_vld,
dout,
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input
[7:0]
din;
input
din_vld;
output
[7:0]
dout;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire
[7:0]
din;
wire
din_vld;
reg
[7:0]
dout;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
wire
[7:0]
row1_data;
wire
[7:0]
row2_data;
wire
[7:0]
row3_data;
wire
[7:0]
row1_data_r;
wire
[7:0]
row2_data_r;
//有效值
reg
[2:0]
vld;
//3*3
reg
[7:0]
row1_1;
reg
[7:0]
row1_2;
reg
[7:0]
row1_3;
reg
[7:0]
row2_1;
reg
[7:0]
row2_2;
reg
[7:0]
row2_3;
reg
[7:0]
row3_1;
reg
[7:0]
row3_2;
reg
[7:0]
row3_3;
//sum
reg
[9:0]
sum_1;
reg
[9:0]
sum_2;
reg
[9:0]
sum_3;
reg
[11:0]
sum;
//缓存三行 第一级流水
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_1<=7'b0;row1_2<=7'b0;row1_3<=7'b0;
row2_1<=7'b0;row2_2<=7'b0;row2_3<=7'b0;
row3_1<=7'b0;row3_2<=7'b0;row3_3<=7'b0;
end
else if(vld[0]==1'b1)
begin
row1_1<=row1_data;row1_2<=row1_1;row1_3<=row1_2;
row2_1<=row2_data;row2_2<=row2_1;row2_3<=row2_2;
row3_1<=row3_data;row3_2<=row3_1;row3_3<=row3_2;
end
end
//第二级流水
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum_1 <= 10'b0;
sum_2 <= 10'b0;
sum_3 <= 10'b0;
end
else if(vld[1]==1'b1)begin
sum_1 <= {2'd0,row1_1} + {1'd0,row1_2,1'd0} + {2'd0,row1_3};
sum_2 <= {1'b0,row2_1,1'b0} + {row2_2,2'd0} + {1'd0,row2_3,1'b0};
sum_3 <= {2'd0,row3_1} + {1'd0,row3_2,1'd0} + {2'd0,row3_3};
end
end
//第三级流水sum
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum<=12'b0;
end
else if(vld[2]==1'b1)begin
sum<=sum_1+sum_2+sum_3;
end
end
//vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld<=3'b0;
end
else
begin
vld<={vld[1:0],din_vld};
end
end
//dout_vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld<=1'b0;
end
else
begin
dout_vld<=vld[2];
end
end
//dout
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout<=8'b0;
end
else
begin
dout<=sum[4+:8];//从第4个开始,位宽为8
end
end
assign row1_data=row1_data_r;
assign row2_data=row1_data_r;
assign row3_data=din;
c_shift_ram_1 u_shift_ram_0 (
.D(din),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row2_data_r)
// output wire [0 : 0] Q
);
c_shift_ram_1 u_shift_ram_1 (
.D(row2_data_r),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row1_data_r)
// output wire [0 : 0] Q
);
endmodule
效果展示:(不理想,所以最后没有用这个模块)

二值化
了解更多二值化操作可参考图像二值化算法
首先使用的是全局二值化,给定一个全局阈值
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
gray2bin.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.9.30
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.9.30
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module gray2bin
(
//clock and reset
rst,
//reset
clk,
//clock
din,
din_vld,
dout,
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input
[7:0]
din;
input
din_vld;
output
dout;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire
[7:0]
din;
wire
din_vld;
reg
dout;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
//阈值比较
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld<=1'b0;
dout<=1'b0;
end
else
begin
dout_vld<=din_vld;
dout<=(din>100);
end
end
endmodule
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
gray2local_bin.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.10.11
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.10.11
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module gray2local_bin
(
//clock and reset
rst,
//reset
clk,
//clock
din,
din_vld,
dout,
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input
[7:0]
din;
input
din_vld;
output
dout;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire
[7:0]
din;
wire
din_vld;
reg
dout;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
wire
[7:0]
row1_data;
wire
[7:0]
row2_data;
wire
[7:0]
row3_data;
wire
[7:0]
row1_data_r;
wire
[7:0]
row2_data_r;
//有效值
reg
[3:0]
vld;
//3*3
reg
[7:0]
row1_1;
reg
[7:0]
row1_2;
reg
[7:0]
row1_3;
reg
[7:0]
row2_1;
reg
[7:0]
row2_2;
reg
[7:0]
row2_3;
reg
[7:0]
row3_1;
reg
[7:0]
row3_2;
reg
[7:0]
row3_3;
//sum
reg
[12:0]
sum;
//阈值
reg
[7:0]
thresh;
//中心值延迟
reg
[7:0]
value_delay1;
reg
[7:0]
value_delay2;
//3*3滑动窗口
parameter
NUM = 5'd9;
//缓存三行 第一级流水
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_1<=1'b0;row1_2<=1'b0;row1_3<=1'b0;
row2_1<=1'b0;row2_2<=1'b0;row2_3<=1'b0;
row3_1<=1'b0;row3_2<=1'b0;row3_3<=1'b0;
end
else if(vld[0]==1'b1)
begin
row1_1<=row1_data;row1_2<=row1_1;row1_3<=row1_2;
row2_1<=row2_data;row2_2<=row2_1;row2_3<=row2_2;
row3_1<=row3_data;row3_2<=row3_1;row3_3<=row3_2;
end
end
//第二级流水sum
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
sum<= 13'b0;
end
else if(vld[1]==1'b1)begin
sum<=row1_1+row1_2+row1_3+row2_1+row2_2+row2_3+row3_1+row3_2+row3_3;
end
end
//第三级流水均值+k
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
thresh <= 8'b0;
end
else if(vld[2]==1'b1)begin
thresh <= (sum+{sum,3'b0})>>7;//取近似 sum*0.9/NUM~sum*9/96
>>6 >>5
NUM==9
//thresh <= sum>>3;
end
end
//vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld<=4'b0;
end
else
begin
vld<={vld[2:0],din_vld};
end
end
//dout_vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld<=1'b0;
end
else
begin
dout_vld<=vld[3];
end
end
//输出阈值大于thresh输出1
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout<=1'b0;
end
else if(thresh<value_delay2)
begin
dout<=1'b1;
end
else
begin
dout<=1'b0;
end
end
//当前中心值
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
value_delay1<=8'b0;
value_delay2<=8'b0;
end
else
begin
value_delay1<=row2_2;
value_delay2<=value_delay1;
end
end
assign row1_data=row1_data_r;
assign row2_data=row2_data_r;
assign row3_data=din;
c_shift_ram_1 u_shift_ram_0 (
.D(din),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row2_data_r)
// output wire [0 : 0] Q
);
c_shift_ram_1 u_shift_ram_1 (
.D(row2_data_r),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row1_data_r)
// output wire [0 : 0] Q
);
endmodule
效果展示:

如果换张图片带有阴影:
会是怎样呢?
边缘检测(sobel)
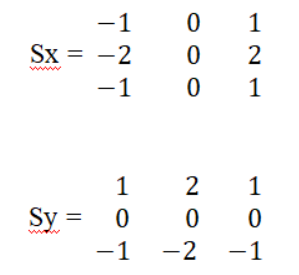
Sobel算子主要用于检测图像边缘,在物体的边缘通常都有像素的变化,反映了物体与背景之间的差异,或者两个物体之间的差异。它是一个离散差分算子,用来计算像素点上下、左右领域内像素点的加权差,根据在边缘处达到极值来检测边缘。另外,Sobel算子对噪声也有一定的平滑作用,检测出精确的边缘信息,但是边缘定位精度不高。
Sobel算子在水平方向和垂直方向各采用一个模板,检测各方向上的边缘,其优点是计算简单,速度快;但是对于纹理较为复杂的图像,检测效果不理想。水平方向模板Sx和垂直方向模板Sy如下:
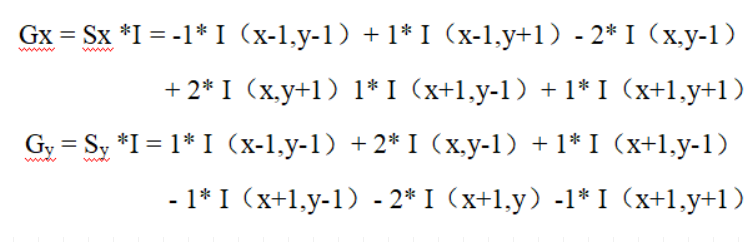
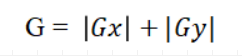
图像中每个像素点对应的梯度值按照以下公式计算:
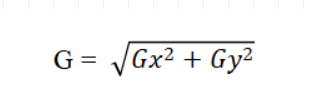
图像中每个像素点对应的梯度值按照以下公式计算:
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
sobel.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.10.8
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.10.8
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module sobel
(
//clock and reset
rst,
//reset
clk,
//clock
din,
//输入二值化图像
din_vld,
dout,
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input
din;
input
din_vld;
output
dout;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire
din;
wire
din_vld;
reg
dout;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
wire
row1_data;
wire
row2_data;
wire
row3_data;
wire
row1_data_r;
wire
row2_data_r;
//有效值
reg
[3:0]
vld;
//3*3
reg
row1_1;
reg
row1_2;
reg
row1_3;
reg
row2_1;
reg
row2_2;
reg
row2_3;
reg
row3_1;
reg
row3_2;
reg
row3_3;
//x, y sum
reg
[2:0]
x0_sum;
reg
[2:0]
x2_sum;
reg
[2:0]
y0_sum;
reg
[2:0]
y2_sum;
//x,y abs
reg
[2:0]
x_abs;
reg
[2:0]
y_abs;
//阈值
reg
[2:0]
g;
//缓存三行 第一级流水
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
row1_1<=1'b0;row1_2<=1'b0;row1_3<=1'b0;
row2_1<=1'b0;row2_2<=1'b0;row2_3<=1'b0;
row3_1<=1'b0;row3_2<=1'b0;row3_3<=1'b0;
end
else if(vld[0]==1'b1)
begin
row1_1<=row1_data;row1_2<=row1_1;row1_3<=row1_2;
row2_1<=row2_data;row2_2<=row2_1;row2_3<=row2_2;
row3_1<=row3_data;row3_2<=row3_1;row3_3<=row3_2;
end
end
//第二级流水
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
x0_sum <= 3'b0;
x2_sum <= 3'b0;
y0_sum <= 3'b0;
y2_sum <= 3'b0;
end
else if(vld[1]==1'b1)begin
x0_sum <= {2'd0,row1_1} + {1'd0,row1_2,1'd0} + {2'd0,row1_3};
x2_sum <= {2'd0,row3_1} + {1'd0,row3_2,1'd0} + {2'd0,row3_3};
y0_sum <= {2'd0,row1_1} + {1'd0,row2_1,1'd0} + {2'd0,row3_1};
y2_sum <= {2'd0,row1_3} + {1'd0,row2_3,1'd0} + {2'd0,row3_3};
end
end
//第三级流水abs
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
x_abs <= 3'b0;
y_abs <= 3'b0;
end
else if(vld[2]==1'b1)begin
x_abs <= (x0_sum >= x2_sum)?(x0_sum-x2_sum):(x2_sum-x0_sum);
y_abs <= (y0_sum >= y2_sum)?(y0_sum-y2_sum):(y2_sum-y0_sum);
end
end
//第四级流水计算梯度
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)begin
g <= 3'b0;
end
else if(vld[3]==1'b1)begin
g <= x_abs + y_abs;//绝对值之和 近似 平方和开根号
end
end
//vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
vld<=4'b0;
end
else
begin
vld<={vld[2:0],din_vld};
end
end
//dout_vld
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout_vld<=1'b0;
end
else
begin
dout_vld<=vld[3];
end
end
//输出阈值大于3输出1
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
dout<=1'b0;
end
else if(g>2)
begin
dout<=1'b1;
end
else
begin
dout<=1'b0;
end
end
assign row1_data=row1_data_r;
assign row2_data=row2_data_r;
assign row3_data=din;
c_shift_ram_0 u_shift_ram_0 (
.D(din),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row2_data_r)
// output wire [0 : 0] Q
);
c_shift_ram_0 u_shift_ram_1 (
.D(row2_data_r),
// input wire [0 : 0] D
.CLK(clk),
// input wire CLK
.SCLR(rst),
// input wire SCLR
.Q(row1_data_r)
// output wire [0 : 0] Q
);
endmodule
效果展示

顶层文件
/*******************************************************************************
*
*
*
(c) Copyright 1995-2017 TAIHO ELE Co,Ltd.
*
*
All rights reserved.
*
*
*
********************************************************************************
*
*
FileName
:
top.v
*
Abstract
:
This module is an example for coding.
*
Author
:
Mouhongbing
*
Version
:
1.1
*
Release
:
2022.9.23
*
Revision
:
*
Version Date
Author
Modification description
*
1.0
Mouhongbing
2022.9.23
*
******************************************************************************/
`timescale 1ns/100ps
//----------------------------------------------------------------------
//
MODULE DEFINTION
//----------------------------------------------------------------------
module top
(
//clock and reset
rst,
//reset
clk,
//clock
rgb_din,
//
din_vld,
rgb_out,
//
dout_vld
);
//interface parameter
//----------------------------------------------------------------------
//
PORT SIGNAL DEFINATION
//----------------------------------------------------------------------
//clock and reset
input
rst;
//reset
input
clk;
//clock
input
[23:0]
rgb_din;
input
din_vld;
output
[23:0]
rgb_out;
output
dout_vld;
//----------------------------------------------------------------------
//
PORT SIGNAL TYPE
//----------------------------------------------------------------------
//clock and reset
wire
rst;
//reset
wire
clk;
//clock
wire
[23:0]
rgb_din;
wire
din_vld;
reg
[23:0]
rgb_out;
reg
dout_vld;
//----------------------------------------------------------------------
//
INTERNAL SIGNAL DEFINATION
//----------------------------------------------------------------------
//灰度
wire [7:0] dout_gray;
wire
gray_vld;
//高斯滤波
wire
[7:0]
dout_gauss;
wire
gauss_vld;
//二值化
wire
dout_bin;
wire
bin_vld;
//sobel
wire
dout_sobel;
wire
sobel_vld;
//灰度转化
rgb2gray u_rgb2gray
(
//clock and reset
.rst
(rst
),
//reset
.clk
(clk
),
//clock
.din
(rgb_din
),
.din_vld
(din_vld
),
.dout
(dout_gray
),
.dout_vld
(gray_vld
)
);
//对灰度图进行高斯滤波
//gauss u_gauss
//(
//
//clock and reset
//
.rst
(rst
),
//reset
//
.clk
(clk
),
//clock
//
//
.din
(dout_gray ),
//
.din_vld
(gray_vld
),
//
//
.dout
(dout_gauss),
//
.dout_vld
(gauss_vld )
//);
//灰度转全局二值化
gray2bin u_gray2bin
(
//clock and reset
.rst
(rst
),
//reset
.clk
(clk
),
//clock
.din
(dout_gray
),
.din_vld
(gray_vld ),
.dout
(dout_bin ),
.dout_vld
(bin_vld
)
);
//局部二值化
//gray2local_bin u_gray2local_bin
//(
//
//clock and reset
//
.rst
(rst
),
//reset
//
.clk
(clk
),
//clock
//
//
.din
(dout_gray
),
//
.din_vld
(gray_vld ),
//
//
.dout
(dout_bin ),
//
.dout_vld
(bin_vld
)
//
//);
//sobel
sobel u_sobel
(
//clock and reset
.rst
(rst
),
//reset
.clk
(clk
),
//clock
.din
(dout_bin
),
//输入二值化图像
.din_vld
(bin_vld ),
.dout
(dout_sobel ),
.dout_vld
(sobel_vld
)
);
always@(posedge clk,posedge rst)
begin
if(rst==1'b1)
begin
rgb_out<=24'b0;
dout_vld<=1'b0;
end
else
begin
rgb_out<={24{dout_sobel}};
dout_vld<=sobel_vld;
//
rgb_out<={3{dout_gauss}};
//
dout_vld<=gauss_vld;
end
end
endmodule
改进中- - - -
最后
以上就是外向路人最近收集整理的关于FPGA-图像处理-仿真说明图片读取和写入灰度转换高斯滤波二值化边缘检测(sobel)顶层文件改进中- - - -的全部内容,更多相关FPGA-图像处理-仿真说明图片读取和写入灰度转换高斯滤波二值化边缘检测(sobel)顶层文件改进中-内容请搜索靠谱客的其他文章。
![[论文笔记]Integrated Networking, Caching, and Computing for Connected Vehicles: A DRL Approach结论及未来工作介绍系统描述系统模型深度强化学习问题建模仿真结果与讨论](https://www.shuijiaxian.com/files_image/reation/bcimg9.png)







发表评论 取消回复